
Hola a todos de nuevo!!
¿Cómo van esas vacaciones? Seguro que bien, por eso os traigo un tema bastante interesante y que puede resultar bastante curioso a más de un@. Si os estáis aburriendo en vuestras vacaciones y tenéis una Raspberry Pi y un RTL-SDR (escaner de radio) podéis hacerlo en casa.
Con estas dos cosas puedes hacer un radar aéreo casero y que funciona bastante bien, aprendes a manejarte con Linux, librerías, dependencias, hardware, protocolos y tu resultado lo verás en tiempo real!
Más de un@ dirá, pues yo no tengo lo que hace falta, además, seguro que es caro. Pues os digo que no, además de que ambos dispositivos se pueden usar en infinidad de aplicaciones y es una de las cosas que a todo hacker le gustaría tener en su arsenal de herramientas. Todo este procedimiento se puede hacer tanto bajo Windows como Linux, por lo que, no hay excusa, así que vamos a ello.
Bien, para que sepamos de que va la historia, vamos a utilizar la herramienta Dump1090. Esta herramienta (entre muchas otras cosas) se encarga de procesar la información del sistema ADS-B (Automatic dependent surveillance—broadcast) que todos o prácticamente todos los aviones tienen (empezará a se obligatorio en ciertos paises en 2020). Este sistema es una tecnología de vigilancia cooperativa en la que un avión determina su posición a través de la navegación por satélite y la emite periódicamente, lo que permite realizar su seguimiento. La información puede ser recibida por las estaciones terrestres de control de tráfico aéreo como un reemplazo para el radar secundario ya que no necesita recibir una señal desde tierra para emitir. También, puede ser recibida por otras aeronaves para proporcionar conocimiento de la situación y permitir la auto-separación. Gracias a este sistema ¡nuestra Raspberry Pi podrá ser un radar de tráfico aéreo!. Este sistema normalmente emite una señal se a 1090 Mhz y que nuestro RTL-SDR puede recibir. 🙂
Bueno y, ¿qué hay que hacer o qué necesito?
- Una Raspberry Pi y su fuente de alimentación, acompañado de un cable Ethernet. En mi caso tengo el kit Raspberry Pi 3 B.

- Un espectómetro de radiofrecuencia, también conocido por RTL-SDR (Software Defined Radio). Utiliza generalmente el chip RTL2832U para el procesamiento de la señal recibida de la antena. Algún día hablaré más sobre esta maravillosa herramienta. En mi caso tengo: DVB-T-SDR.

- Una tarjeta microSD (con su adaptador al PC) para la Raspberry Pi. Yo uso una de 8 GB que tenía de andar por casa, que para este caso vale de sobra. Si la queréis seguir usando para otras aplicaciones se os puede quedar corta.
- Raspbian, el sistema operativo Linux basado en Debian que usaremos en la Raspberry Pi. Se puede descargar gratuitamente desde su página oficial. Al ser una tarea que no se requiere nada más que la Raspberry Pi y el RTL-SDR nos descargaremos el SO básico sin sistema gráfico (solo línea de comandos). Las ventajas es que, pesa menos, nos ahorramos la parte gráfica, ya que no usaremos la salida HDMI para nada, y por tanto tampoco el teclado y ratón; con todo esto ahorraremos procesamiento innecesario y sobre todo energía.
Ya tenemos todo lo necesario, ¡manos a la obra!
Para comenzar, tendremos que montar la imagen en la microSD para que la Raspberry Pi pueda acarrancar y use la microSD como memoria persistente, (todos los cambios que se hagan se quedarán guardados incluso si apagamos la Raspberry Pi).
Este punto se puede hacer de muchas formas; la página oficial recomienda el uso de Etcher, que vale tanto para distribuciones Linux como Windows, ya que tiene una interfaz muy amigable. Yo personalmente, siempre uso Rufus, nunca me ha fallado, es portable y me parece el mejor de todos (para gusto los colores), lo malo, es que solo está bajo Windows. Pero como ya he dicho, todo el desarrollo de este procedimiento se puede hacer tanto bajo Windows como bajo Linux, por lo que no habría problema. Elegid el que más os guste.
Conectamos nuestra tarjeta microSD al PC y en mi caso al usar Rufus, ejecutamos Rufus y seleccionamos la imagen del SO, y la microSD. No hay que seleccionar nada más, el resto son opciones avanzadas que no vienen al tema. Listo, ¡damos a empezar!

Una vez que el proceso haya terminado, tendremos la microSD con nuestro sistema operativo Raspbian instalado, y si nos fijamos, tendremos dos particiones. La partición boot que es la que usa para bootear el sistema y la partición rootfs que es donde se encuentra el file system del SO.
Como he mencionado antes, no vamos a usar ni teclado ni ratón ya que no hace falta. Esto acarrea un problema y es que por defecto (por seguridad) el servidor SSH se encuentra deshabilitado y necesitaríamos acceso físico a nuestra Raspberry Pi, y posteriormente, habilitarlo. Pero podemos solucionarlo, solo tendremos que crear un archivo vacío con nombre “ssh” sin extensión en la partición boot.

Listo, cuando arranquemos nuestra RaspberryPi, tendremos el servidor SSH habilitado para poder conectarnos desde nuestro PC. Como es de esperar, es necesario que tengamos acceso remoto a nuestra Raspberry Pi, por lo que lo ideal sería conectar el cable ethernet (que normalmente viene con el router) al puerto Ethernet físico de la Raspberry Pi. Introducimos la microSD y le conectamos la fuente de alimentación a 5V. Aquí podríamos usar o un cargador de móvil de al menos 1 A aunque se recomienda 2.4 A (ya que en el peor de los casos es la mayor corriente que podrá consumir), pero estamos a salvo, ya que éste no será nuestro caso, porque solo tendremos consumiento principalmente nuestro RTL-SDR, el procesador Broadcom y la controladora de ethernet. También podríamos usar una batería portatil (powerbank) que normalmente tienen salida de 1 A y de 2.4 A. Elegid lo que os venga mejor.
Tras unos segundos después del arranque, solo nos quedará saber la IP local que se le ha asignado a nuestra Raspberry Pi, y posteriormente conectarnos usando protocolo SSH.
- En Linux:
root@kali:/home/closer# netdiscover
root@kali:/home/closer# ssh 192.168.1.40 -l pi
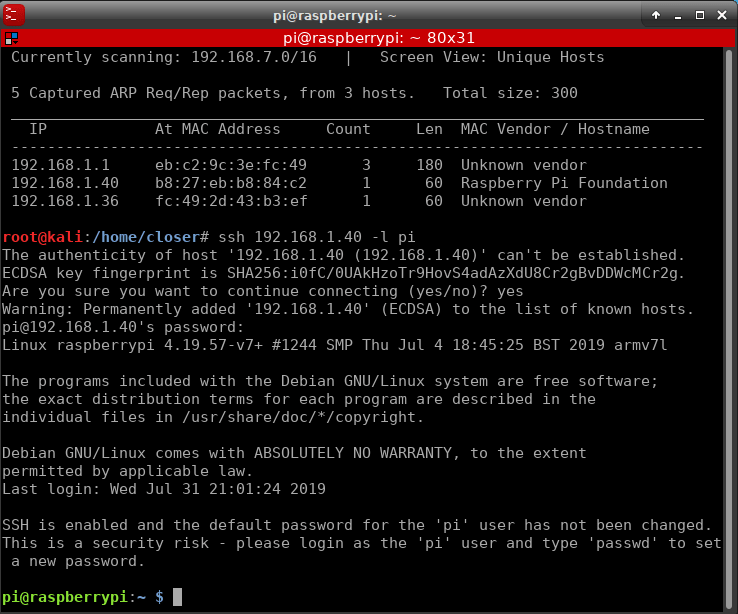
Nos pedirá la contraseña, que es raspberry y aceptaremos la petición de conectarnos ya que se ha generado un fingerprint personalizado para la conexión segura entre nuestro PC y nuestra Raspberry Pi.
Tras aceptar, ¡ya estamos conectados a nuestra Raspberry Pi!
- En Windows:
Por defecto, Windows anteriores a Windows 10 no trae ningún cliente para poder conectarnos por SSH, pero hay herramientas como Putty que nos hace de cliente. Para descargarnos la versión portable, con solo ir a la sección de “Alternative binary files” y seleccionar nuestra versión del binario “putty.exe” (x64 u x86). Si usas Windows 10 (a partir de Abril de 2018) ya viene, por defecto, el cliente SSH.
Una vez en nuestras manos, en la ventana de comandos lanzaremos:
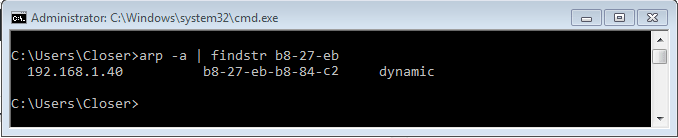
C:\Users\Closer> arp -a | findstr b8-27-eb
Con “arp -a” mostraremos la tabla ARP (Address Resolution Protocol) que se encarga de asociar las IPs dinámicas y estáticas con direcciones MAC. Dado que la tabla ARP puede ser un poco extensa y no tener claro cual es la IP de nuestra Raspberry Pi, podemos filtrarla con “findstr b8-27-eb” ya que en la industria de asignaciones de direcciones MAC cada fabricante se asigna un rango de direcciones MAC, en este caso para Raspberry Pi Fundation tiene asignadas las direcciones MAC B8:27:EB:xx:xx:xx. Por tanto nuestra salida podría quedar tal que:
Ahora, sí, sabiendo a IP a la que nos tenemos que conectar, abrimos Putty (en caso de tenerlo), escribimos la IP, declaramos que queremos conexión por SSH con el puerto 22 (por defecto para TCP) y nos conectaremos:

Nos saldrá el aviso igual que antes en Linux, de confirmar el fingerprint para la conexión segura, aceptamos, y ya tendremos acceso a nuestra Raspberry Pi, nos pedirá usuario para el login que como ya sabéis es pi y la contraseña raspberry.
En caso de tener Windows 10, el comando es el mismo que en Linux.
A partir de aquí, ya es lo mismo tanto para Linux como Windows, yo continuaré en Linux. Vamos a la chicha.
Antes de todo, que no se os olvide cambiar la contraseña por defecto de la Raspberry Pi.
Primeramente y ya que la imagen de nuestra Raspberry Pi puede tener algo de tiempo, es decir, estar algo desactualizada (que haya pasado un tiempo desde la release), y el contenido de los repositorios hayan podido cambiar, esto, nuestro Raspbian no lo sabe. Por tanto, es recomendable actualizar el listado de los paquetes, para tener la versión más reciente de ellos y ver cuáles son necesarios actualizar y a qué versión, en caso de requerir una instalación.
pi@raspberrypi:~ $ sudo apt-get update
Cuando nuestro Raspbian ya tenga el listado de paquetes actualizado, será necesario instalar la dependencias. Diréis ¿dependencias de qué? Las dependencias que son en definitiva librerías (en este caso paquetes) que son necesarias para poder instalar la herramienta con la que vamos a jugar.🙂
Gracias a los buenos repositorios no será necesario complicarnos la vida. Salvo que queramos descargar alguna librería/paquete en específico o a una versión que no esté en los repos, lo ideal sería coger el que nos ofrecen e instalarlo, ya que son librerías que ya están más que probadas y están empaquetadas (nos ahorramos el proceso de compilación y lo que eso conlleva, ya que para ciertas librerías es un poco tedioso). Instalamos las siguientes librerías:
pi@raspberrypi:~ $ sudo apt-get install -y debhelper libusb-1.0-0-dev librtlsdr-dev librtlsdr0 rtl-sdr lighttpd
Si os habéis bajado, por cualquier razón, otra release de Raspbian (con entorno gráfico por ejemplo) puede ser que alguna esté ya instalada. Para este caso, esas librerías son todas necesarias, y de hecho, algunas son dependencias de otras librerías, e importa el orden. Con -y no nos pedirá confirmación de instalación y reserva de memoria en la unidad microSD (todo a “yes”).
Por último, nos queda instalar la herramienta con la que jugaremos. Esta herramienta es la conocida dump1090 aunque a lo largo de su vida (su último desarrollo fue hace 7 años) ha ido mutando y usuarios de Github han ido haciendo forks de ella y hay versiones modificadas y con features nuevas. Hay un par de empresas que hacen uso extensivo de esta herramienta y con sus propias modificaciones, al final os contaré de que van. Nosotros instalaremos la última que hay, llamada dump1090-mutability. He de decir que, no es realmente la última ya que FlightAware hizo un fork de esta y ha introducido nuevas features, pero me he decantado por la mutability porque FA la ha adaptado a su SO modificado. Como ya he dicho, al final comentaré mejor sobre esto.
Bueno, sigamos:
pi@raspberrypi:~ $ sudo apt-get install -y dump1090-mutability
Si todo ha ido bien (que debería), al terminar el proceso de instalación automáticamente se lanza el asistente de configuración del paquete. Donde nos saldrá una ventana como la siguiente:

Nos pedirá que si queremos que se lance automáticamente al iniciar nuestra Raspberry Pi, indicamos “Yes” si queremos que sea así, en caso contrario, tendríamos que lanzarlo a mano cada vez que queramos usarlo. Como mi intención es más adelante seguir añadiendo features a nuestra Raspberry indico que sí.
Por otro lado, este asistente nos ha asignado una configuración por defecto en “/etc/default/dump1090-mutability“. En este punto, se puede hacer dos cosas; si hacemos “dpkg-reconfigure dump1090-mutability” nos volverá a aparecer el asistente que nos irá preguntando una a una, una serie de configuraciones/parámetros (que en su mayoria las dejariamos por defecto) que podríamos ir cambiándolas, o, editar el archivo en la ruta anterior mencionada. Para que no se extense esto, os dejaré la configuración que se encuentra en “/etc/default/dump1090-mutability” que habría que utilizar para que podamos tener nuestro radar de vuelo con las características mínimas (que un futuro podríamos modificar).
El archivo de configuración debería quedar tal:
# dump1090-mutability configuration file
# this is a POSIX shell fragment.
# You can edit this file directly, or use
# "dpkg-reconfigure dump1090-mutability"
# Set to "yes" to start dump1090 on boot.
START_DUMP1090="yes"
# User to run dump1090 as.
DUMP1090_USER="dump1090"
# Logfile to log to
LOGFILE="/var/log/dump1090-mutability.log"
#
# Receiver options
#
# RTLSDR device index or serial number to use
# If set to "none", dump1090 will be started in --net-only mode
DEVICE="0"
# RTLSDR gain in dB.
# If set to "max" (the default) the maximum supported gain is used.
# If set to "agc", the tuner AGC is used to set the gain.
GAIN="max"
# RTLSDR frequency correction in PPM
PPM="0"
#
# Decoding options
#
# If yes, fixes messages with correctable CRC errors.
FIX_CRC="yes"
# If set, supplies a reference location for local position decoding.
LAT="LATITUD"
LON="LONGITUD"
# If set, provides the absolute maximum receiver range used to
# filter bad position reports, and to determine when local position
# decoding is safe to use. Specify this in nautical miles (NM).
MAX_RANGE="300"
#
# Networking options
#
# Port to listen on for raw (AVR-format) input connections. 0 disables.
RAW_INPUT_PORT="30001"
# Port to listen on for raw (AVR-format) output connections. 0 disables.
RAW_OUTPUT_PORT="30002"
# Port to listen on for SBS-format output connections. 0 disables.
SBS_OUTPUT_PORT="30003"
# Port to listen on for Beast-format input connections. 0 disables.
BEAST_INPUT_PORT="30004,30104"
# Port to listen on for Beast-format output connections. 0 disables.
BEAST_OUTPUT_PORT="30005"
# TCP heartbeat interval in seconds. 0 disables.
NET_HEARTBEAT="60"
# Minimum output buffer size per write, in bytes.
NET_OUTPUT_SIZE="500"
# Maximum buffering time before writing, in seconds.
NET_OUTPUT_INTERVAL="1"
# TCP buffer size, in bytes
NET_BUFFER="262144"
# Bind ports on a particular address. If unset, binds to all interfaces.
# This defaults to binding to localhost. If you need to allow remote
# connections, change this.
NET_BIND_ADDRESS=""
#
# Misc options
#
# Interval (in seconds) between logging stats to the logfile. 0 disables.
STATS_INTERVAL="3600"
# Path to write json state to (for use with an external webserver). Blank disables.
JSON_DIR="/run/dump1090-mutability"
# Interval between writing json state (in seconds). 0 disables.
JSON_INTERVAL="1"
# Accuracy of receiver location to write to json state, one of "exact" / "approximate" / "none"
JSON_LOCATION_ACCURACY="approximate"
# Set to yes to log all decoded messages
# This can get large fast!
LOG_DECODED_MESSAGES="no"
# Additional options that are passed to the Daemon.
EXTRA_ARGS=""
Los parámetros de color blanco son los de por defecto o poco relevantes para lo que queremos, y los azules son los que realmente son importantes de cambiar, tal y como dice la configuración. Eso sí, que no se os olvide cambiar los parámetros LATITUD y LONGITUD de la configuración con la latitud y longitud de la ubicación de vuestra Raspberry Pi.
Para terminar, debemos de asegurarnos de que se ha habilitado el uso de la librería lighttpd para dump1090, debería de haberlo hecho al finalizar la instalación de la herramienta. En caso de que no se haya habilitado tendríamos que habilitarla y forzar a reiniciar el servicio con:
pi@raspberrypi:~ $ lighty-enable-mod dump1090
pi@raspberrypi:~ $ sudo service lighttpd force-reload
Por último, reiniciamos el servicio de dump1090-mutability. Se puede hacer de varias formas, como la anterior de lighttpd, usando service, pero también se podría desde el adminitrador de servicios de Linux, systemctl. Elegid el que queráis, para este caso no importa.
pi@raspberrypi:~ $ sudo systemctl restart dump1090-mutability.service
¡Ya lo tenemos todo!
Vamos a la dirección IP de nuestra Raspberry Pi para ver el mapa.
En mi caso http://192.168.1.40/dump1090/gmap.html
¡Mira como queda!
Y ¡así me ha quedado el sistema!
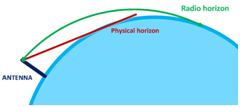
A quien le guste este mundillo, os recomiendo investigar y leer más sobre esto. Además con Dump1090 se puede hacer alguna cosa más, como añadirle trazas de altimetría en el mapa, ya que esto también tiene su estudio. Por ejemplo, hemos puesto que use una distancia de por defecto 300 millas náuticas y que haga uso de la ganancia al máximo, etc, esto a veces no es así o no es lo que queremos, ya que depende mucho de las circunstancias en las que nos encontremos. Como ya he dicho esto tiene su estudio, como por ejemplo la refracción de las ondas, que nos limitará así como si estamos en un sitio bajo, o con árboles, la llegada de las ondas de radio.
En definitiva, a quien le guste esto hay varias plataformas que se dedican a esto exclusivamente y son bastantes buenas, como por ejemplo FlightRadar24 o Flighaware que como ya comenté usan sus variaciones de Dump1090, de hecho, tienen sistemas operativos especializados en esto, es decir un “todo en uno” que lo instalas en tu Raspberry Pi y con acceso a Internet envian los datos a las plataformas, y hacer entre toda la comunidad, un radar de vuelo MUNDIAL. Si estáis interesados, en cada una de las plataformas, os indican como hacerlo paso a paso.
Espero haberme explicado con claridad y que os haya gustado. Si os ha gustado este mundillo, quizás algún día hago un post para capturar la señal de algún satélite que transmite imágenes. 😏
Nos vemos en el siguiente post! 😉
Happy Hacking!
Autor: Rafael Moreno López.
Buen trabajo!!
Muchas gracias Rubén!
Podría agregarle a mi proyecto seria genial,Gracias muy Interesante.
Genial, me alegro!
Muy buen proyecto Rafael!
Muchas gracias por compartirlo
Muchas gracias Alex, a tí!
Muy buena explicación
Hi there,
this is a very good blog I appreciate your work. thanks for sharing such a useful information.
rcg999 เว็บไซต์สล็อต สล็อตออนไลน์ยอดฮิต เว็บไซต์สล็อตเว็บไซต์ตรง pg slot เป็นสล็อตออนไลน์ที่มีผู้เล่นมากมายก่ายกองทั้งยังผู้เล่นเก่าและก็ผู้เล่นที่พึ่งพิงเข้าแวดวงเว็บไซต์
Hey there! I’ve been reading your site for some time
now and finally got the courage to go ahead and give you a shout out from Lubbock Tx!
Just wanted to tell you keep up the great work!
I have tried to reach the clinic to get a receipt for insurance purposes and have not heard back 11 days later generic cytotec for sale
buy lasix online no prescription Thiazides need to be excreted into the tubular lumen to exert their effect
You’ll Never Guess This Kayleigh Wanless Porn Star’s Secrets kayleigh wanless
porn star (Ghstream.Com)
гарантия при продаже аккаунтов магазин аккаунтов социальных сетей
маркетплейс аккаунтов магазин аккаунтов
Guaranteed Accounts Accounts for Sale
Account Buying Platform Account Buying Service
Verified Accounts for Sale Secure Account Purchasing Platform
Account exchange Buy Account
Accounts market Account Trading
account trading platform account marketplace
social media account marketplace buy pre-made account
account trading platform buy pre-made account
buy pre-made account purchase ready-made accounts
sell accounts buy accounts
accounts for sale find accounts for sale
account marketplace buy accounts
account market online account store
account buying service https://accounts-for-sale.org/
account sale account trading service
account trading platform account trading platform
account trading service secure account purchasing platform
accounts marketplace sell accounts
online account store account market
account trading sell accounts
find accounts for sale https://accounts-marketplace.xyz/
website for selling accounts accounts market
guaranteed accounts account marketplace
social media account marketplace https://buy-accounts-shop.pro/
account purchase buy-accounts.live
account exchange https://social-accounts-marketplace.live/
биржа аккаунтов https://akkaunt-magazin.online/
маркетплейс аккаунтов https://akkaunty-market.live
facebook ads accounts https://buy-adsaccounts.work/
buy facebook ads accounts https://buy-ads-account.click
buy facebook ad accounts https://ad-account-buy.top
buy facebook ad accounts buy aged facebook ads account
facebook account sale https://ad-account-for-sale.top/
google ads account buy sell google ads account
buy verified google ads accounts https://buy-ads-accounts.click
buy fb ads account https://buy-accounts.click
buy google ads verified account google ads accounts for sale
google ads reseller https://buy-ads-invoice-account.top
buy google ads verified account buy google ads accounts
buy google agency account https://buy-verified-ads-account.work
verified business manager for sale buy facebook business manager account
buy facebook verified business account https://buy-business-manager-acc.org
buy facebook bm https://business-manager-for-sale.org
buy business manager https://buy-business-manager-accounts.org/
buy tiktok ads account https://tiktok-ads-account-buy.org
tiktok ads account for sale https://tiktok-ads-account-for-sale.org
buy tiktok ads accounts https://tiktok-agency-account-for-sale.org
buy tiktok ad account https://buy-tiktok-ads.org
температура воды в хургаде в апреле
легальна онлайн робота для дівчат Стань вебкам моделью в польской студии, работающей в Варшаве! Открыты вакансии для девушек в Польше, особенно для тех, кто говорит по-русски. Ищешь способ заработать онлайн в Польше? Предлагаем подработку для девушек в Варшаве с возможностью работы в интернете, даже с проживанием. Рассматриваешь удаленную работу в Польше? Узнай, как стать вебкам моделью и сколько можно заработать. Работа для украинок в Варшаве и высокооплачиваемые возможности для девушек в Польше ждут тебя. Мы предлагаем легальную вебкам работу в Польше, онлайн работа без необходимости знания польского языка. Приглашаем девушек без опыта в Варшаве в нашу вебкам студию с обучением. Возможность заработка в интернете без вложений. Работа моделью онлайн в Польше — это шанс для тебя! Ищешь “praca dla dziewczyn online”, “praca webcam Polska”, “praca modelka online” или “zarabianie przez internet dla kobiet”? Наше “agencja webcam Warszawa” и “webcam studio Polska” предлагают “praca dla mlodych kobiet Warszawa” и “legalna praca online Polska”. Смотри “oferty pracy dla Ukrainek w Polsce” и “praca z domu dla dziewczyn”.
Large selection allows you to select an acceptable
course for every person regardless of gender. Our store steroids
UK cares about its customers, their privacy, and therefore
relies on the non-public service that every buyer feel particular and unique.
Enter authorized steroids — natural supplements designed to imitate the muscle-building and fat-burning results of anabolic steroids with out the dangerous side effects or legal penalties.
If you are contemplating muscle-building supplements, it’s essential
to understand the stark distinction between authorized steroids and anabolic steroids.
Regardless Of having related objectives — increased muscle mass, power, and efficiency — the
2 merchandise are vastly different in terms of safety, legality, and long-term effects.
This is due to the injection enabling Dianabol to enter the bloodstream immediately as an alternative of getting to
bypass the liver. Salicylic acid is another frequent pimples
remedy; nevertheless, this is less efficient in comparison to retinoids.
Topical antibiotics are additionally an advantageous remedy for acne, decreasing inflamed lesions by
46-70% (27). To avoid such resistance, antibiotics ought to contain benzoyl peroxide, which will further
cut back irritation. Some studies have shown milk thistle to
be efficient at lowering irritation and reducing liver enzymes, especially in these suffering from acute
hepatitis. To fight hepatotoxicity, our patients frequently take liver support supplements, corresponding to milk thistle (Silybum marianum).
Again the FDA would pressure Ciba for extra data, however in 1983 beneath mounting pressure
Ciba would discontinue the Dianabol tab.
A few years later, the FDA would pull all Methandrostenolone manufacturers from the shelf.
Since that point Dianabol has not been legally manufactured in the Usa, however is still manufactured heavily all over the world.
With Out this C17-aa component, customers wouldn’t be ready to experience optimum
results from Dianabol. Tamoxifen (Nolvadex) seems to be the most effective drug, according to research (12)
and our expertise. Nonetheless, anti-estrogens are usually considered
a gentle therapy for gynecomastia. According to 2018 statistics,
the common value of gynecomastia surgery is $3,824 (13).
We have discovered that bodybuilders on Dianabol can experience an increase in vascularity.
This is when the veins turn out to be more visible,
often seen spiraling by way of a person’s muscle tissue, resembling a human roadmap.
However, it might be Dianabol that might bring forth
the modern age of efficiency enhancement and the conclusion of what anabolic steroid growth hormone use could
do in a efficiency capability. Oddly sufficient, for decades people who have supported
steroid bans have touted there’s no proof
Dianabol truly enhances efficiency. Anybody who
has used the steroid is aware of how ridiculous that is,
and if it weren’t it wouldn’t be one of the most wanted anabolic steroids
on the earth for more than 50 years.
Whereas Trenbolone is a managed substance and requires
a prescription in lots of countries, it’s obtainable through certain channels.
Analysis suggests that while accessibility might enhance
through telemedicine improvements, price reductions are less
sure. Predictive fashions present a possible rise in prescription prices by up to 10% by 2025.
This enhance may be offset by improved insurance coverage, yet disparities in accessibility might persist throughout
totally different regions and demographics.
The only downside that we see with Winstrol, in regard to body composition, is that it could possibly sometimes
deflate the muscular tissues because of its reducing glycogen levels.
This can be attributed to its diuretic properties, caused by a
lack of aromatase enzyme, resulting in much less intracellular fluid.
So, for optimum results on Dianabol, customers generally undertake a calorie
surplus diet, known as a bulking part. We have seen customers abstain from lifting weights and nonetheless
see noticeable improvements in physique composition (being sedentary) from Dianabol use.
Thus, if a Dianabol product just isn’t working, it’s likely the particular person has been scammed.
The finest method to examine its authenticity is
by buying a testing kit, which confirms whether the Dianabol is actual or fake.
A strong post-cycle remedy protocol, as outlined within the PCT section, will help reduce your catabolic state post-cycle and assist
retain extra of your gains. This means some dealers are promoting
placebos but labeling it as real Dianabol.
In this article, we’ll delve into the scientific aspects and make clear its mode of action. Anavar
belongs to the class of anabolic steroids, specifically synthetic derivatives of dihydrotestosterone (DHT).
Its molecular construction has been altered to enhance its anabolic properties whereas decreasing its androgenic effects.
As a end result, Oxandrolone displays a lower potential
for androgenic unwanted side effects compared to different steroids.
Whereas fluctuations in uncooked material prices can significantly influence the pricing of anabolic steroids, current tendencies recommend a posh interplay of factors that want cautious examination.
Key uncooked supplies like plant-based sterols
and chemical reagents are subject to market volatility because
of geopolitical tensions and environmental rules.
Knowledge indicates a possible improve in uncooked material prices by 5-10% annually, impacting steroid prices.
As technological advances continue to reshape the panorama of anabolic steroid production, the development of cost-effective artificial
pathways stands at the forefront of these improvements.
красное море температура воды
kitesurfing
Hi to all, the contents present at this web page are actually awesome for people experience, well, keep up the good work fellows.
abu dhabi bus card recharge
car transport rates Dealership Car Delivery and Dealer Transport Services Dealerships rely heavily on efficient and reliable car transport services. Dealership car delivery is a specialized service that ensures vehicles reach customers promptly and in pristine condition. Dealer transport services facilitate the movement of vehicles between dealerships, auctions, and storage facilities. Home delivery car dealerships are gaining popularity, offering customers the convenience of having their new or used car delivered directly to their doorstep.
металлопрокат купить в москве цена Цветной металлопрокат в Москве: купить для специальных задач Цветной металлопрокат (алюминий, медь, бронза и др.) используется в тех случаях, когда требуются особые свойства материала: высокая электропроводность, устойчивость к коррозии, малый вес. В Москве можно найти широкий ассортимент цветного металлопроката для различных отраслей промышленности.
Владимир Чернышев
Бани из клееного бруса под ключа Строительство дома, бани из клееного бруса: Мы используем только высококачественные материалы и современное оборудование. Наши специалисты – это команда профессионалов с многолетним опытом работы. Мы гарантируем индивидуальный подход к каждому клиенту и высокое качество строительства. Позвольте нам воплотить вашу мечту о загородной жизни в реальность!
https://plombi.ru/product/40-signal/
Pharmaceuticals Bazaar Drugs Marketplace: A New Darknet Platform with Dual Access Bazaar Drugs Marketplace is a new darknet marketplace rapidly gaining popularity among users interested in purchasing pharmaceuticals. Trading is conducted via the Tor Network, ensuring a high level of privacy and data protection. However, what sets this platform apart is its dual access: it is available both through an onion domain and a standard clearnet website, making it more convenient and visible compared to competitors. The marketplace offers a wide range of pharmaceuticals, including amphetamines, ketamine, cannabis, as well as prescription drugs such as alprazolam and diazepam. This variety appeals to both beginners and experienced buyers. All transactions on the platform are carried out using cryptocurrency payments, ensuring anonymity and security. In summary, Bazaar represents a modern darknet marketplace that combines convenience, a broad product selection, and a high level of privacy, making it a notable player in the darknet economy.
Группа в Telegram Доска бесплатных объявлений “Все для Вас Архангельск”: товары, услуги, авто, жильё, работа, розыгрыши, отзывы и многое другое. Архангельск, Северодвинск, Новодвинск, Катунино, Березник, Рикасиха, Холмогоры, Мезень, Карпогоры архангельск
обучение кайтсёрфингу Kitesurfing это спорт, доступный всем, кто хочет испытать адреналин и насладиться красотой моря.
инфографика для маркетплейсов заказать
Кайт сафари
замена тэна стиральной машины алматы Ремонт платы стиральной машины в Алматы – это работа для профессионалов, которые знают все тонкости электроники.
бесплатная диагностика стиральной машины алматы Диагностика стиральной машины Алматы. Определение причины поломки, точная смета на ремонт.
прием металлолома Ауэзовский район Прием железа в Алматы: оперативный вывоз, честная оценка, быстрая оплата.
Бездепозитные бонусы в казино
компрессор отбойные молотки Демонтаж касс магазина – профессиональные услуги.
vavada casino отзывы Вавада Казино Официальный Сайт: Откройте для себя мир азарта и развлечений на официальном сайте Вавада Казино, где вас ждут захватывающие игры и щедрые бонусы.
экстренно разнорабочие алматы Заказать разнорабочих в Алматы удобно через онлайн-платформы или агентства. Это позволяет быстро найти и нанять подходящих специалистов для выполнения необходимых работ.
70918248
References:
big bonus virtual casinos (Smpnsatapptgmanggis.sch.id)
эвакуатор эксклюзивное авто Эвакуатор 4×4 Алматы – занимается эвакуацией полноприводных автомобилей.
Бездепозитные бонусы
Бездепозитный бонус в казино
Sykaaa casino скачать бесплатно на телефон Сукааа казино официальный сайт предлагает широкий выбор игр и привлекательные бонусы.
Бездепозитный бонус
вавада казино официальный сайт рабочее Вавада Казино Официальный Рабочее Зеркало на Сегодняшний День: Всегда имейте доступ к Вавада Казино через рабочее зеркало, актуальное на сегодняшний день, и не упустите возможность испытать удачу.
блокчейн расследования
Бездепозитные бонусы в казино
Sykaaa casino бонусы Sykaaa casino отзывы помогут составить объективное мнение о казино. Узнайте, что говорят другие игроки о своем опыте.
вавада казино официальный сайт Вабанк Казино Официальный Сайт: Посетите официальный сайт Вабанк Казино и окунитесь в мир азартных игр с широким выбором развлечений и возможностью крупных выигрышей.
Бездепозитные бонусы в казино Бездепозитные бонусы в казино: Что это такое? Бездепозитный бонус в казино – это денежная сумма или бесплатные вращения, которые казино предоставляет новым игрокам в качестве приветственного подарка. Главное преимущество этого бонуса заключается в том, что для его получения не требуется внесение депозита. Игрок может просто зарегистрироваться на сайте казино и получить бонус на свой счет.
Бездепозитные бонусы в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Бездепозитный бонус
Бездепозитные бонусы Бездепозитный бонус в казино: Как его получить? Получить бездепозитный бонус в казино, как правило, довольно просто. Обычно требуется пройти процедуру регистрации на сайте казино и подтвердить свою учетную запись. В некоторых случаях может потребоваться ввести специальный промокод. После выполнения всех условий бонус будет автоматически зачислен на ваш счет. Бездепозитные бонусы – это отличная возможность начать свой путь в мире онлайн-казино с минимальным риском и максимальным удовольствием. Однако, прежде чем принимать бонус, всегда внимательно ознакомьтесь с условиями его использования, чтобы избежать недоразумений в будущем.
вавада Вавада Казино Официальный Сайт Вход Бесплатный Играть: Начните играть в Вавада Казино бесплатно, получив доступ к демо-версиям игр и оценив все преимущества этого онлайн-казино.
Бездепозитный бонус в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Бездепозитный бонус в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Бездепозитный бонус
Бездепозитный бонус в казино Бездепозитные бонусы: Путь к азартным приключениям без риска В мире онлайн-казино, где азарт и возможность выигрыша переплетаются в захватывающем танце, бездепозитные бонусы занимают особое место. Эти щедрые предложения служат своеобразным ключом, открывающим двери в мир азартных развлечений без необходимости вкладывать собственные средства.
Sykaaa casino приложениевавада казино Sykaaa casino официальный сайт бонус за регистрацию – отличный старт для новых игроков. Получите дополнительные средства для игры сразу после регистрации.
Бездепозитные бонусы в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Игорь Стоунберг отзывы Я очень благодарна Игорю за помощь. Он помогает людям в трудных ситуациях. | Рада, что обратилась. |
Бездепозитный бонус в казино
1000 рублей за регистрацию вывод сразу без вложений в казино
Telegram стикеры NFT Airdrop криптовалюты – бесплатная раздача токенов для привлечения новых пользователей.
Игорь Стоунберг экстрасенс Игорь Стоунберг – не просто экстрасенс, а настоящий целитель душ.
Бездепозитные бонусы
1000 рублей за регистрацию вывод сразу без вложений
Бездепозитные бонусы
1000 рублей за регистрацию
hleb na zakvaske Домашний хлеб Ташкент – это тепло и уют, которые мы передаем в каждом кусочке. Наш хлеб приготовлен по традиционным рецептам, с использованием только натуральных ингредиентов.
Работа для школьников во Владивостоке Подработка во Владивостоке для студентов: совмещение учебы и заработка Студенты Владивостока могут найти множество вариантов подработки, позволяющих совмещать учебу и работу. Гибкий график и неполная занятость делают подработку идеальным способом заработать деньги и получить ценный опыт. Популярные варианты включают работу в сфере обслуживания, курьерскую доставку и помощь в проведении мероприятий.
Бездепозитный бонус в казино
1000 рублей за регистрацию вывод сразу без вложений в казино адмирал
Бездепозитные бонусы в казино
1000 рублей за регистрацию вывод сразу
Бездепозитные бонусы в казино
кайтсёрфинг в хургаде Кайтсерфинг в хургаде: Почувствуйте адреналин и свободу, скользя по волнам в Хургаде.
I got this site from my buddy who told me on the topic of this site and now this time I am visiting this web site and reading very informative content at this time.
Try 88fb login and enjoy fast gaming with rewards
кайт сафари в хургаде Кайт споты египта: Откройте для себя разнообразие кайт-спотов Египта, от лагун с мелкой водой до открытого моря с большими волнами. Каждый найдет здесь место по душе.
Бездепозитный бонус в казино
1000 рублей за регистрацию в казино без депозита
кайт споты египта : Кайт школа унесенные ветром: Почувствуй себя свободным вместе с нами!
кайт школа в хургаде : Обучение кайтингу: Думаете, это сложно? Ерунда! Наши инструкторы превратят вас в профи за пару дней! Мы научим вас не только стоять на доске, но и понимать ветер, чувствовать волну и получать максимум удовольствия от катания!
кайт школа унесенные ветром : Кайт школы санкт петербург: Обучение кайтсерфингу в любое время года!
Бездепозитные бонусы в казино
1000 рублей за регистрацию вывод сразу без вложений в казино адмирал
кайт : Кайт школа спб: Сделай свой первый шаг в мир кайтсерфинга!
оранжевый остров в хургаде есть там акулы : Кайт школа в хургаде: Твой билет в мир кайтсерфинга!
Бездепозитный бонус
можно мнстным довить акул в хургаде Кайт дети ветра: Откройте для себя мир, где ветер – ваш лучший друг, а волны – танцплощадка. Почувствуйте прилив адреналина и единение с природой, обучившись кайтсерфингу у профессионалов.
1000 рублей за регистрацию в казино без депозита
египет русская кайт школа : Кайт школа унесенные ветром: Почувствуй свободу и адреналин!
кайт сафари Кайт школа веселовка: Кайт школа на популярном споте Веселовка
1000 рублей за регистрацию вывод сразу
iko что означает Кайтсерфинг хургада: Лучшие кайт-споты Хургады ждут вас!
кайтсерфинг сертификат iko : detivetra
https://kitehurghada.ru Обучение кайтсёрфингу: Профессиональные инструкторы и безопасное обучение для всех уровней.
Simply desire to say your article is as astounding. The clearness to your put up is just great and that i could assume you are an expert on this subject. Well together with your permission let me to grab your feed to keep up to date with forthcoming post. Thanks one million and please continue the enjoyable work.
Child Porn
Бездепозитный бонус
игровые автоматы бонус 1000 рублей за регистрацию без депозита
кайтсерфинг сертификат iko Кайт сафари египет: Исследуйте самые живописные уголки Египта на кайт сафари. Почувствуйте себя частью природы и насладитесь адреналином.
перевозка пианино газель алматы Грузоперевозки в Алматы – это качественный и оперативный сервис, который предлагает широкий выбор автомобилей, в том числе и газелей, для решения различных задач. Если вам необходимо перевезти мебель, бытовую технику или строительные материалы, наши услуги газели в Алматы помогут вам осуществить это быстро и надежно. Мы предлагаем аренду газелей различной грузоподъемности, включая короткие и длинные модели, а также специальное оборудование, например, термобудки и рефрижераторы для транспортировки чувствительных грузов. Вы можете заказать газель с грузчиками для удобного переезда, будь то офисный или квартирный. Наша команда профессиональных грузчиков обеспечит аккуратную упаковку, разборку и сборку мебели, а также позаботится о безопасной перевозке ваших вещей. В Алматы мы работаем круглосуточно, предоставляя возможность вызвать газель в любое время суток. Цены на грузоперевозки в Алматыvarьируются в зависимости от расстояния и объема работ, но мы всегда готовы предложить конкурентные расценки и специальные скидки для постоянных клиентов. Для срочных заказов мы предоставляем услуги быстрого реагирования, чтобы вы не переживали о задержках. Не упустите возможность воспользоваться самым удобным и экономичным способом перевозки в Алматы. Свяжитесь с нами по телефону или через WhatsApp, чтобы обсудить детали вашего заказа. Обращайтесь за надежной газелью в Алматы и убедитесь сами в качестве наших услуг!
Кино 2025 бесплатно Телеграм канал с фильмами: Подпишитесь и будьте в курсе новинок.
Zara kids Zara – это всемирно известный бренд, завоевавший популярность благодаря своему актуальному дизайну, высокому качеству и доступным ценам. Zara предлагает широкий выбор одежды для всей семьи, включая детскую линию Zara Kids. Садовод Поставщик
Здоровье подводного человека Запуск маркерного буя – это навык, позволяющий дайверу обозначить свое местоположение на поверхности воды. Виды маркерных буев дайвера
рулонные шторы на пластиковые окна Штора для ванны – это важный элемент интерьера ванной комнаты, который должен быть не только функциональным, но и красивым. Шторы ночь
Канал про дайвинг Погружения в сухом костюме – это возможность заниматься дайвингом в холодной воде, сохраняя тепло и комфорт. Сухарь для дайвера
Пробное погружение с аквалангом Существует множество видов акул, отличающихся по размеру, форме и образу жизни. Нападение акулы на человека
buy facebook ads account marketplace for ready-made accounts secure account sales
buy fb account marketplace for ready-made accounts account trading
Не каждый день находишь площадку, где хочется задержаться подольше. официальный сайт Vodka Casino приятно удивил. Бонусы не просто на словах — они реально работают. Игры продуманы до деталей. Можно играть хоть с утра до ночи. Такие впечатления редко где получишь.
888starz казино с выводом https://fizmatschool2.ru/wp-content/articles/?skachat_671.html
BrunoCasino klantenservice https://forum.onetime.nl/topic/23837-brunocasinoone/
888 starz http://1by.by/stat/stoit-li-igrat-s-telefona-preimushhestva-i-nedostatki.html
can you drink creatine while fasting
References:
neurotrauma
Chicken Road slothttps://apkpure.com/p/app.chickenroad.game
888starz download on iPhone for free https://www.pgyer.com/apk/apk/app.starz.online
download 888starz https://www.pgyer.com/apk/en/apk/app.starz.online
888starz bet telechargement gratuit https://www.pgyer.com/apk/fr/apk/app.starz.online
chicken road https://www.pgyer.com/apk/apk/app.chickenroad.game
rooster bet https://www.pgyer.com/apk/apk/rooster.bet.app
NeoSpin Casino app download https://www.pgyer.com/apk/apk/neospin.casino.slots
скачать 888 starz на андроид бесплатно https://centralpaulista.com.br/sem-categoria/888starz-bukmekerskaya-kontora-stavki-na-aviasport/
888starz скачать на айфон бесплатно https://beta.sovvy.com/888starz-veb-zhurnal-dlya-stavok-bezo-blokirovok-a-takzhe-limitov/
888 starz скачать бесплатно https://activeseries.academy/dolzhnostnoy-zhurnal-888stars/
888starz букмекерская контора https://flaviazabalarealstate.com/888starz-dolzhnostnoy-veb-zhurnal-bukmekerskoy-kontory-a-takzhe-kazino/
Hello there, You have done a fantastic job. I will certainly digg it and personally recommend to my friends. I’m confident they will be benefited from this web site.
https://excl.com.ua/iak-uniknuty-polomky-far-zavdiaky-pravylnym-instrumentam.html
Ce site a ete concu pour fournir des informations essentielles.
Parmi ses principales fonctionnalites, Vous y trouverezdes rubriques variees, incluant des contenus surles projets en cours.
La simplicite et l’ergonomie sont au c?ur de la realisation, afin de garantirune utilisation fluide et efficace.
Les informations disponibles sont adaptees aux changements municipaux, afin de vous offrir une plateforme veritablement vivante et dynamique.
https://www.postman.com/brendon-s-postman
Dans un monde ou l’acces aux savoirs oublies reste limite, cette initiative propose une alternative essentielle en reinventant les formats de creation et de partage. Cette ressource unique se consacre a la transformation des savoirs.)
A travers un prisme interdisciplinaire croisant art, science et engagement, ce projet vous offre une analyse approfondie sur ces questions complexes.
Les formats proposes melent des contenus ecrits, des echanges en milieu universitaire et des projets participatifs et permettent d’embrasser des sujets souvent laisses dans l’ombre
Les mises a jour frequentes garantissent des apports toujours renouveles, refletant les enjeux culturels et sociaux qui traversent nos societes.
http://lacambre.be/en/news/julien-ribeiro
I get pleasure from, lead to I found just what I was taking a look for. You’ve ended my four day lengthy hunt! God Bless you man. Have a great day. Bye
live gay porn
Excellent post but I was wanting to know if you could write a litte more on this topic? I’d be very thankful if you could elaborate a little bit further. Many thanks!
viagra preis
Nase webova platforma poskytuje uceleny pohled na deni kolem veslovani mladych.
Zde naleznete prehledne informace o ucastnicich, vcetne zakulisnich zajimavosti.
Web je navrzen tak, aby byl uzivatelsky prehledny, srozumitelny pro siroke publikum, at uz se zajimate o veslovani.
Diky pravidelnym aktualizacim mate neustale pristup k cerstvym informacim, zahrnujic novinky od organizatoru.
https://nlroei.nl/hugo-slangen-verovert-brons-bij-coupe/
Ce portail propose une immersion dans le travail d’un ensemble base a Nantes. Son contenu explore des manifestations culturelles authentiques. La navigation a ete pensee pour etre intuitive et fluide. De nouveaux contenus sont mis a jour pour vous offrir une experience actuelle. https://www.radiofrance.fr/francemusique/podcasts/le-concert-de-20h/au-coeur-de-la-pulsation-avec-les-musiciens-de-l-orchestre-de-paris-de-l-eic-et-des-arts-florissants-8118043
Decouvrez une approche innovante pour transformer vos evenements, mettant en avant des conceptions uniques. Il permet de donner vie a vos projets, avec une attention particuliere a chaque element. ainsi que l’usage de materiaux de qualite. Les concepts et scenographies y sont crees avec soin, afin de rendre chaque evenement veritablement exceptionnel. https://www.bitchute.com/channel/decorationmariagesfr
Saviez-vous qu’il existe un centre entierement dedie au soin, au toilettage et au confort de vos animaux de compagnie?
Ce service est axe sur l’idee dele respect des besoins specifiques de chaque animal, pour garantir un moment agreable aussi bien pour l’animal que pour vous.
Si votre objectif est de offrir le meilleur a votre fidele ami, vous trouverez ici un accompagnement sur mesure et professionnel.
Mettant a jour ses pratiques et ses propositions, ce service reste au fait des dernieres tendances et besoins.
https://leetcode.com/u/euretoilettage/
комедії дивитись онлайн сучасне українське кіно онлайн
Тяговые аккумуляторные https://ab-resurs.ru батареи для складской техники: погрузчики, ричтраки, электротележки, штабелеры. Новые АКБ с гарантией, помощь в подборе, совместимость с популярными моделями, доставка и сервисное сопровождение.
Продажа тяговых АКБ https://faamru.com для складской техники любого типа: вилочные погрузчики, ричтраки, электрические тележки и штабелеры. Качественные аккумуляторные батареи, долгий срок службы, гарантия и профессиональный подбор.
Лучший маркетплейс купить аккаунты Instagram приветствует вас в нашем разделе расходников. Если вам нужно купить Facebook-аккаунты, чаще всего важен не «одном логине», а в управляемости: предсказуемая операционка, разделение задач между участниками и аккуратные изменения. Мы оформили короткую карту выбора, чтобы вы без лишних вопросов понимали что сравнивать перед заказом.Что внутри: типы сущностей и сценарии. Важно: покупка — стартовая точка. Дальше решает порядок: кто имеет доступ, как вы ведете кампании последовательно, как фиксируете изменения и как отделяете тесты от масштабирования. Ключевое преимущество данной площадки — заключается в наличие масштабной базы знаний, где выложены актуальные гайды по операционке. Мы подскажем, как без лишних рисков разделить роли, чтобы вы старт был предсказуемым и соблюдались правила . Оформляя здесь, вы получаете не только состав, а также полную консультацию, прозрачные правила, гарантию на валид и самые приятные цены на рынке. Дисклеймер: используйте активы законно и всегда в соответствии с правилами платформ.
Uitbetalen bij crystal roll casino contact met priority support voor withdrawal requests binnen 30 minuten.
Мультимедийный интегратор айтек интеграция мультимедийных систем под ключ для офисов и объектов. Проектирование, поставка, монтаж и настройка аудио-видео, видеостен, LED, переговорных и конференц-залов. Гарантия и сервис.
Online bij crystal online casino met mobile-first design en 1.2-second load times.
Site web 1xbet pour Android 1xbet apk
Looking for a casino? 8mbets Slots, table games, and live casino all in one place. Quick login, convenient registration, modern providers, stable payouts, and comfortable player conditions.
Playing at the casino? jwin 7 Play online for real money. We offer a wide selection of slots, live dealers, fast payments, easy login, and exciting offers for new and returning players.
Продажа IQOS ILUMA https://ekb-terea.org и стиков TEREA в СПб. Только оригинальные устройства и стики, широкий ассортимент, оперативная доставка, самовывоз и поддержка клиентов на всех этапах покупки.
Купить IQOS ILUMA https://spb-terea.store и стики TEREA в Санкт-Петербурге с гарантией оригинальности. В наличии все модели ILUMA, широкий выбор вкусов TEREA, быстрая доставка по СПб, удобная оплата и консультации специалистов.
IQOS ILUMA https://terea-iluma24.org и стики TEREA — покупка в Москве без риска. Гарантия подлинности, большой выбор, выгодные условия, доставка по городу и помощь в подборе устройства и стиков.
сервисы онлайн рассылок сервис по рассылкам писем
the best adult generator https://pornjourney.app/ai-porn-chat/ create erotic videos, images, and virtual characters. flexible settings, high quality, instant results, and easy operation right in your browser. the best features for porn generation.
сервис рассылок российские сервисы для рассылки email
Жіночий портал https://soloha.in.ua про красу, здоров’я, стосунки та саморозвиток. Корисні поради, що надихають історії, мода, стиль життя, психологія та кар’єра – все для гармонії, впевненості та комфорту щодня.
Портал для жінок https://u-kumy.com про стиль, здоров’я та саморозвиток. Експертні поради, чесні огляди, лайфхаки для дому та роботи, ідеї для відпочинку та гармонійного життя.
Galatasaray Football Club https://galatasaray.com.az/ latest news, fixtures, results, squad and player statistics. Club history, achievements, transfers and relevant information for fans.
Barcelona fan site barcelona.com.az/ with the latest news, match results, squads and statistics. Club history, trophies, transfers and resources for loyal fans of Catalan football.
UFC Baku fan site ufc-baku.com.az/ for fans of mixed martial arts. Tournament news, fighters, fight results, event announcements, analysis and everything related to the development of UFC in Baku and Azerbaijan.
Rafa Silva rafa silva is an attacking midfielder known for his dribbling, mobility, and ability to create chances. Learn more about his biography, club career, achievements, playing style, and key stats.
Сайт города Одесса https://faine-misto.od.ua свежие новости, городские события, происшествия, культура, экономика и общественная жизнь. Актуальные обзоры, важная информация для жителей и гостей Одессы в удобном формате.
Сайт города Винница https://faine-misto.vinnica.ua свежие новости, городские события, происшествия, экономика, культура и общественная жизнь. Актуальные обзоры, важная информация для жителей и гостей города.
Новости Житомира https://faine-misto.zt.ua сегодня: события города, инфраструктура, транспорт, культура и социальная сфера. Обзоры, аналитика и оперативные обновления о жизни Житомира онлайн.
Портал города Хмельницкий https://faine-misto.km.ua с новостями, событиями и обзорами. Всё о жизни города: решения местных властей, происшествия, экономика, культура и развитие региона.
Новости Львова https://faine-misto.lviv.ua сегодня: городские события, инфраструктура, транспорт, культура и социальная повестка. Обзоры, аналитика и оперативные обновления о жизни города онлайн.
Днепр онлайн https://faine-misto.dp.ua городской портал с актуальными новостями и событиями. Главные темы дня, общественная жизнь, городские изменения и полезная информация для горожан.
Автомобильный портал https://avtogid.in.ua с актуальной информацией об автомобилях. Новинки рынка, обзоры, тест-драйвы, характеристики, цены и практические рекомендации для ежедневного использования авто.
Новости Киева https://infosite.kyiv.ua события города, происшествия, экономика и общество. Актуальные обзоры, аналитика и оперативные материалы о том, что происходит в столице Украины сегодня.
познавательный блог https://zefirka.net.ua с интересными статьями о приметах, значении имен, толковании снов, традициях, праздниках, советах на каждый день.
Объясняем сложные https://notatky.net.ua темы просто и понятно. Коротко, наглядно и по делу. Материалы для тех, кто хочет быстро разобраться в вопросах без профессионального жаргона и сложных определений.
Полтава онлайн https://u-misti.poltava.ua городской портал с актуальными новостями и событиями. Главные темы дня, общественная жизнь, городские изменения и полезная информация для горожан.
Портал города https://u-misti.odesa.ua Одесса с новостями, событиями и обзорами. Всё о жизни города: решения властей, происшествия, экономика, спорт, культура и развитие региона.
Новости Житомира https://u-misti.zhitomir.ua сегодня: городские события, инфраструктура, транспорт, культура и социальная сфера. Оперативные обновления, обзоры и важная информация о жизни Житомира онлайн.
telecharger le site web melbet melbet apk
Новости Хмельницкого https://u-misti.khmelnytskyi.ua сегодня на одном портале. Главные события города, решения властей, происшествия, социальная повестка и городская хроника. Быстро, понятно и по делу.
Львов онлайн https://u-misti.lviv.ua последние новости и городская хроника. Важные события, заявления официальных лиц, общественные темы и изменения в жизни одного из крупнейших городов Украины.
Новости Киева https://u-misti.kyiv.ua сегодня — актуальные события столицы, происшествия, политика, экономика и общественная жизнь. Оперативные обновления, важные решения властей и ключевые темы дня для жителей и гостей города.
Актуальные новости https://u-misti.chernivtsi.ua Черновцов на сегодня. Экономика, происшествия, культура, инфраструктура и социальные вопросы. Надёжные источники, регулярные обновления и важная информация для жителей города.
Новости Днепра https://u-misti.dp.ua сегодня — актуальные события города, происшествия, экономика, политика и общественная жизнь. Оперативные обновления, важные решения властей и главные темы дня для жителей и гостей города.
connexion au site web 1win 1win apk
Городской портал https://u-misti.cherkasy.ua Черкасс — свежие новости, события, происшествия, экономика и общественная жизнь. Актуальные обзоры, городская хроника и полезная информация для жителей и гостей города.
pinco casino скачать клиент https://pinco-install-casino.ru
Поставляем грунт https://organicgrunt.ru торф и чернозем с доставкой по Москве и Московской области. Подходит для посадок, благоустройства и озеленения. Качественные смеси, оперативная логистика и удобные условия для частных и коммерческих клиентов.
joycasino казино казино джой
Op zoek naar een casino? WinItt Casino biedt online gokkasten en live games. Het biedt snel inloggen, eenvoudige navigatie, moderne speloplossingen en stabiele prestaties op zowel computers als mobiele apparaten.
продажа 1 квартиры сочи жк светский лес
Изделия из пластмасс https://ftk-plastik.ru собственного производства. Продажа оптом и в розницу, широкий ассортимент, надёжные материалы и стабильные сроки. Выполняем заказы любой сложности по техническому заданию клиента.
Жалюзи от производителя https://balkon-pavilion.ru изготовление, продажа и профессиональная установка. Большой выбор дизайнов, точные размеры, надёжная фурнитура и комфортный сервис для квартир и офисов.
Производим пластиковые https://zavod-dimax.ru окна и выполняем профессиональную установку. Качественные материалы, точные размеры, быстрый монтаж и гарантийное обслуживание для комфорта и уюта в помещении.
Производство оборудования https://repaircom.ru с предварительной разработкой и адаптацией под требования клиента. Качественные материалы, точные расчёты, соблюдение сроков и техническая поддержка.
Szukasz kasyna? kasyno online w Polsce: wybor najlepszych stron do gry. Licencjonowane platformy, popularne sloty i kasyna na zywo, wygodne metody platnosci, uczciwe warunki i aktualne oferty.
Торговая мебель https://woodmarket-for-business.ru от производителя для бизнеса. Витрины, стеллажи, островные конструкции и кассовые модули. Индивидуальный подход, надёжные материалы и практичные решения для продаж.
Производим торговую мебель https://woodmarket-for-business.ru для розничного бизнеса и сетевых магазинов. Функциональные конструкции, современный дизайн, точные размеры и полный цикл работ — от проекта до готового решения.
Оборудование для отопления https://thermostock.ru и водоснабжения: котлы, циркуляционные насосы, радиаторы, мембранные баки и комплектующие от ведущих производителей. Что вы получаете: сертифицированные товары, прозрачные цены, оперативную обработку заказа. Создайте комфортный микроклимат в доме — выбирайте профессионалов!
Нужен памятник? памятник уфа — гранитные и мраморные изделия. Индивидуальные проекты, точная обработка камня, оформление и монтаж. Надёжное качество и внимательное отношение к деталям.
Нужен памятник? памятник уфа — гранитные и мраморные изделия. Индивидуальные проекты, точная обработка камня, оформление и монтаж. Надёжное качество и внимательное отношение к деталям.
Нужно авто? привезти автомобиль из китая в россию поиск, проверка, оформление и доставка авто из разных стран. Прозрачные условия, помощь на всех этапах и сопровождение сделки до получения автомобиля.
дизайн студия 17 комплектация объекта
Нужен памятник? заказать памятник в уфе — гранитные и мраморные изделия. Индивидуальные проекты, точная обработка камня, оформление и монтаж. Надёжное качество и внимательное отношение к деталям.
Только что опубликовано: https://dzen.ru/a/aVF1vtLHgkQMThpP
Нужен проектор? интернет-магазин проекторов большой выбор моделей для дома, офиса и бизнеса. Проекторы для кино, презентаций и обучения, официальная гарантия, консультации специалистов, гарантия качества и удобные условия покупки.
Нужен проектор? projector24 большой выбор моделей для дома, офиса и бизнеса. Проекторы для кино, презентаций и обучения, официальная гарантия, консультации специалистов, гарантия качества и удобные условия покупки.
Do you need a master? Local Philly handyman for apartments and houses. Repairs, installation, replacement, and maintenance. Experienced specialists, professional tools, and a personalized approach to every task.
Проблемы с авто? автоэлектрик фольксваген спб диагностика, ремонт электрооборудования, блоков управления, освещения и систем запуска. Опыт, современное оборудование и точное определение неисправностей.
Celebrity World Care https://celebrityworldcare.com интернет-магазин профессиональной медицинской и натуральной косметики для ухода за кожей при ихтиозе, дерматитах, псориазе и других дерматологических состояниях. Сертифицированные средства с мочевиной, без отдушек и парабенов. Доставка по России.
квартиры сочи жк жк светский лес сочи купить квартиру
Модульные дома https://modulndom.ru под ключ: быстрый монтаж, продуманные планировки и высокое качество сборки. Подходят для круглогодичного проживания, отличаются энергоэффективностью, надежностью и возможностью расширения.
Right here is the perfect webpage for anyone who wishes to find out about this topic. You know so much its almost hard to argue with you (not that I really will need to…HaHa). You definitely put a fresh spin on a topic that’s been discussed for a long time. Excellent stuff, just wonderful!
byueuropaviagraonline
Водительская медсправка с психиатром https://med-spravki-msk.ru
Специализированный коррекционно-речевой https://neyroangel.ru детский сад для детей с особенностями развития в Москве. Беремся за самые тяжелые случаи, от которых отказываются другие. Нейропсихолог, логопед, запуск речи. Государственная лицензия: Л035-01298-77/01604531 от 09.12.24
Рэмси Диагностика: https://remsi-med.ru Сеть высокотехнологичных диагностических центров (МРТ, КТ). Точные исследования на оборудовании экспертного класса и качественная расшифровка снимков.
Детский Доктор: https://kidsmedic.ru Специализированный медицинский центр для детей. Квалифицированная помощь педиатров и узких специалистов для здоровья вашего ребенка с первых дней жизни.
Полесская ЦРБ: https://polesskcrb.ru Официальный портал центральной районной больницы Калининградской области. Информация об услугах, расписание врачей и важные новости здравоохранения для жителей региона.
АрсМед: https://arsmedclinic.ru Многопрофильная клиника, предлагающая широкий выбор медицинских услуг от диагностики до лечения. Современный подход и комфортные условия для пациентов всех возрастов.
проектор для фильмов интернет-магазин проекторов
Любишь азарт? up x официальный сайт играть онлайн в популярные игры и режимы. Быстрый вход, удобная регистрация, стабильная работа платформы, понятный интерфейс и комфортные условия для игры в любое время на компьютере и мобильных устройствах.
Любишь азарт? ап икс скачать играть онлайн легко и удобно. Быстрый доступ к аккаунту, понятная навигация, корректная работа на любых устройствах и комфортный формат для пользователей.
интернет магазин люстр сделать деревянную люстру
костюм двойка мужской мужские костюмы
Наш ресурс объединяет ведущих специалистов по автоспорам в Санкт-Петербурге. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, обладающих глубокими знаниями в области автоюридических вопросов. На нашем сайте вы найдёте подробную информацию о юристах, с акцентом на их компетентность и надежность.
Структура сайта разработана с учётом простоты навигации, чтобы помочь вам быстро разобраться во всех возможностях. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, что обеспечивает вам максимальную информированность. https://pbase.com/avtoyurist78spb
Наш ресурс предлагает услуги автоюристов с многолетним опытом. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, обладающих глубокими знаниями в области автоюридических вопросов. На нашем сайте вы найдёте подробную информацию о юристах, с акцентом на их компетентность и надежность.
Структура сайта продумана до мелочей, чтобы помочь вам быстро разобраться во всех возможностях. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, гарантируя вашу уверенность в качестве предоставляемых данных. https://www.minds.com/avtoyurist78spb/
Наш ресурс объединяет ведущих специалистов по автоспорам в Санкт-Петербурге. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, способных эффективно решать самые сложные задачи. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, подчёркивая их профессиональные успехи.
Структура сайта продумана до мелочей, что позволит с лёгкостью найти необходимую услугу. При этом вся информация на ресурсе всегда остаётся достоверной и современной, потому вы можете быть уверены в её надёжности. https://www.bitchute.com/channel/avtoyurist78/
Электромонтажные работы https://electric-top.ru в Москве и области. Круглосуточный выезд электриков. Гарантия на работу. Аварийный электрик.
коррозия у авто? антикоррозийная обработка днища спб эффективная защита от влаги, соли и реагентов. Комплексная обработка кузова и днища, качественные составы и надёжный результат для новых и подержанных авто.
dyson спб pylesos-dn-6.ru .
дайсон сервисный центр санкт петербург pylesos-dn-7.ru .
пылесос dyson пылесос dyson .
Коррозия на авто? antikor-service мы используем передовые шведские материалы Mercasol и Noxudol для качественной защиты днища и скрытых полостей кузова. На все работы предоставляется гарантия сроком 8 лет, а цены остаются доступными благодаря прямым поставкам материалов от производителя.
дайсон где купить в спб dn-pylesos-3.ru .
дайсон пылесос беспроводной купить спб pylesos-dn-6.ru .
пылесос дайсон v15 купить в спб pylesos-dn-7.ru .
Наш ресурс основывается на опыте и знаниях наших экспертов. Мы собрали команду квалифицированных юристов, каждый из которых имеет значительный опыт работы в автомобильной сфере. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, включая их достижения и заслуги.
Структура сайта разработана с учётом простоты навигации, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, что обеспечивает вам максимальную информированность. https://vocal.media/authors/dmitry-volkov
Планируете мероприятие? AI евент уникальные интерактивные форматы с нейросетями для бизнеса. Мы разрабатываем корпоративные мероприятия под ключ — будь то тимбилдинги, обучающие мастер?классы или иные активности с ИИ, — с учётом ваших целей. Работаем в Москве, Санкт?Петербурге и регионах. AI?Event специализируется на организации корпоративных мероприятий с применением технологий искусственного интеллекта.
купить пылесос дайсон в санкт петербурге беспроводной pylesos-dn-6.ru .
пылесос дайсон пылесос дайсон .
купить пылесос дайсон в санкт петербурге беспроводной pylesos-dn-6.ru .
Наш ресурс создан для тех, кто ценит профессиональный подход. Мы собрали группу опытных специалистов, обладающих глубокими знаниями в области автоюридических вопросов. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, с акцентом на их компетентность и надежность.
Структура сайта создана для вашего удобства, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, гарантируя вашу уверенность в качестве предоставляемых данных. https://www.are.na/alexei-petrov-ln2uayifcle/hdoko31u9a4
Противопожарные двери https://bastion52.ru купить для защиты помещений от огня и дыма. Большой выбор моделей, классы огнестойкости EI30, EI60, EI90, качественная фурнитура и соответствие действующим стандартам.
Нужны цветы? купить букет роз закажите цветы с доставкой на дом или в офис. Большой выбор букетов, свежие цветы, стильное оформление и точная доставка. Подойдёт для праздников, сюрпризов и важных событий.
пылесос дайсон купить pylesos-dn-7.ru .
купить пылесос дайсон в санкт петербурге беспроводной pylesos-dn-6.ru .
https://mhp.ooo/
Любишь азарт? комета казино официальный сайт современные слоты, live-форматы, понятные правила и удобный доступ с ПК и смартфонов. Играйте онлайн в удобное время.
Лучшее казино up x официальный играйте в слоты и live-казино без лишних сложностей. Простой вход, удобный интерфейс, стабильная платформа и широкий выбор игр для отдыха и развлечения.
Если вам требуется помощь в организации похорон, обратите внимание на наш сайт, где вы найдёте полную информацию о ритуальных услугах в регионе.
Сайт удобно структурирован. Вы легко найдетенеобходимую информацию о процедурах и услугах для принятия взвешенного решения.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. На сайте представлена актуальная информация о стоимости, процедурах и возможностях.
Свяжитесь с нами для консультации, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://coub.com/dd2d095dafae13b32388
Играешь в казино? up-x Слоты, рулетка, покер и live-дилеры, простой интерфейс, стабильная работа сайта и возможность играть онлайн без сложных настроек.
Лучшее казино up x казино играйте в слоты и live-казино без лишних сложностей. Простой вход, удобный интерфейс, стабильная платформа и широкий выбор игр для отдыха и развлечения.
Играешь в казино? ап икс скачать Слоты, рулетка, покер и live-дилеры, простой интерфейс, стабильная работа сайта и возможность играть онлайн без сложных настроек.
Если вам требуется помощь в организации похорон, обратите внимание на наш сайт, который специализируется на ритуальных услугах в Ульяновске.
Сайт предлагает продуманную навигацию. Вы легко найдетевсё, что нужно для планирования похорон и сможете сделать правильный выбор.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. На сайте представлена актуальная информация о стоимости, процедурах и возможностях.
Оставьте заявку на сайте, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://www.cheaperseeker.com/u/linkcorp
Наш сайт предлагает полное сопровождение в вопросах организации похорон.
Сайт удобно структурирован. Вы легко найдетенеобходимую информацию о процедурах и услугах и сможете сделать правильный выбор.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. Вы сможете ознакомиться с расценками, перечнем услуг и сопутствующими вопросами.
Свяжитесь с нами для консультации, и получите полную поддержку на всех этапах. https://www.instapaper.com/p/roadtocash1
Наш сайт поддержит вас в сложный момент, предоставив профессиональные услуги.
Сайт разработан для вашего удобства. Вы легко найдетенеобходимую информацию о процедурах и услугах и сможете сделать правильный выбор.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. На сайте представлена актуальная информация о стоимости, процедурах и возможностях.
Заполните форму для связи, и мы вам поможем, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://pbase.com/ritualservices73
дайсон центр в спб pylesos-dn-kupit-8.ru .
пылесос дайсон беспроводной спб пылесос дайсон беспроводной спб .
https://plitmart.ru/kak-vybrat-stroitelnye-lyulki-osobennosti-i-sovety-po-vyboru/
Самые качественные https://bliny-olimpiiskie.ru широкий выбор весов и форматов. Надёжные материалы, удобная посадка на гриф, долговечное покрытие. Подходят для фитнеса, пауэрлифтинга и регулярных тренировок.
пылесос dyson купить пылесос dyson купить .
dyson пылесос купить спб pylesos-dn-kupit-10.ru .
Наш сайт предлагает полное сопровождение в вопросах организации похорон.
Удобная структура позволяет без труда найтиразделы с детальным описанием всех процессов.
Вся информация постоянно обновляется, обеспечивая точность и актуальность.
Оставьте заявку на сайте, мы оперативно ответим на все ваши вопросы. https://bio.site/ritual73ulyanovsk
пылесос дайсон беспроводной спб pylesos-dn-kupit-8.ru .
дайсон официальный сайт в санкт петербург дайсон официальный сайт в санкт петербург .
пылесосы дайсон пылесосы дайсон .
пылесосы дайсон санкт петербург пылесосы дайсон санкт петербург .
This tool provides organized access to movie recommendations.Every collection contains movie posters, preview trailers, and direct streaming access,and the collections are sorted by various interests.The platform is actively maintained with latest releases.This approach organizes content for effortless discovery.You can explore these resources at your convenience. https://cinepicker.com/
dyson магазин в спб dyson магазин в спб .
купить пылесос дайсон в санкт петербурге беспроводной купить пылесос дайсон в санкт петербурге беспроводной .
Когда важны не обещания, а реальные выплаты, служба по контракту предлагает четко зафиксированные условия и стабильный доход. Такой формат позволяет строить планы без сомнений. Сделай выбор и начни действовать – ханты мансийск контракт
You can explore various cinematic themes through this service.Each selection includes high-quality posters, engaging trailers, and convenient streaming links,and the collections are structured around diverse topics.Recent titles are consistently added to keep the selection current.This approach streamlines your search by bringing together key elements.You can browse the collections at your own pace. https://cinepicker.com/
заклепка вытяжная 8х10 заклепка алюм вытяжная
Кент казино предлагает удобный формат онлайн игры без лишних сложностей. Регистрация занимает минимальное время. После входа пользователь получает доступ к каталогу игр. Все основные разделы расположены логично. Это упрощает использование сервиса: kent casino играть
This resource is designed to help you discover interesting movies.Every collection contains film posters, trailer videos, and streaming service integrations,and the collections are structured around diverse topics.New titles are constantly added to keep the selection current.This approach streamlines your search by bringing together all necessary elements.You can utilize this tool for your viewing pleasure. https://cinepicker.com/
Why users still use to read news papers when in this technological globe the whole thing is presented on net?
byueuropaviagraonline
This comprehensive platform serves as a guide for film enthusiasts.Every collection provides visual posters, video trailers, and practical streaming guides,and the collections are structured around diverse topics.The content is frequently updated with fresh picks.This approach simplifies movie selection via a comprehensive platform.You can find recommendations that match your taste. https://cinepicker.com/
bahis sitesi 1xbet bahis sitesi 1xbet .
one x bet 1xbet-yeni-giris-2.com .
You can explore various film themes through this service.Each selection features posters, trailers, and direct links to streaming services,and the collections are sorted by various interests.The platform is continuously maintained with new releases.This approach simplifies movie selection via a comprehensive platform.You can access this content easily. https://cinepicker.com/
1xbet g?ncel adres 1xbet g?ncel adres .
1 xbet giri? 1xbet-yeni-giris-2.com .
This site offers a curated approach to film discovery.Each selection features high-quality posters, engaging trailers, and convenient streaming links,and the collections are organized by themes and categories.The platform is continuously maintained with latest releases.This approach organizes content for effortless discovery.You can browse the collections leisurely. https://cinepicker.com/
дизайн проект коттеджа фото дизайн загородных коттеджей
Kush официальный сайт предлагает удобный формат игры онлайн. Регистрация занимает пару минут. Вход доступен круглосуточно. Начни прямо сейчас: казино куш регистрация
новости про машины avto-zhurnal-4.ru .
https://svobodapress.com.ua/karta-brovariv/
журналы для автолюбителей avto-zhurnal-4.ru .
дизайн ванной в квартире дизайн квартиры 58 кв м двухкомнатной
автомобильная газета автомобильная газета .
журнал про машины журнал про машины .
журнал автомобильный журнал автомобильный .
ОЭРН – профильный сервис для проверки компетенций и статуса экспертов по экспертизе недр. Портал упрощает выбрать эксперта по направлениям: геология и ГРР, ТПИ, нефть и газ – и снизить риски при согласовании отчетов и заключений в проектах: отчетность о ресурсах и запасах твердых полезных ископаемых
Казино Кактус бонусы делают игру еще интереснее. После регистрации открывается полный доступ к платформе. Вход выполняется быстро. Используй шанс прямо сейчас – cactus casino официальный сайт
полотенцесушитель водяной полотенцесушитель купить в москве
https://t.me/sex_vladivostoka
карнизы с электроприводом karnizy-s-elektroprivodom77.ru .
электрокарнизы для штор цена электрокарнизы для штор цена .
гардина с электроприводом karnizy-s-elektroprivodom77.ru .
Производство специализированных стеллажей позволяет решать нестандартные задачи хранения. Мы изготавливаем конструкции для катушек, кабельных барабанов, поддонов и автостекол. Все изделия разрабатываются индивидуально. Это обеспечивает безопасность продукции и удобство складских операций – глубинные стеллажи
карниз с приводом для штор karnizy-s-elektroprivodom77.ru .
Do you love gambling? https://cryptodepositcasinos.com allow you to play online using Bitcoin and altcoins. Enjoy fast deposits, instant payouts, privacy, slots, and live dealer games on reliable, crypto-friendly platforms.
nov? online casino nov? online casino .
automaty online casino-cz-1.com .
https://corp.en.cx/Guestbook/Messages.aspx?page=1&fmode=gb&topic=386110&anchor#7983049 фреоновое масло
online casino online casino .
Casino 7k создаёт комфортные условия для онлайн игроков. Быстрый вход в аккаунт и понятный личный кабинет упрощают управление профилем. Сайт не перегружен лишними элементами. Это делает игру более приятной – 7k casino регистрация
лазерная косметология центр косметологии москва
выездной шиномонтаж 24 москва
Нужен сувенир или подарок? https://gifts-kazan.online для компаний и мероприятий. Бизнес-сувениры, подарочные наборы и рекламная продукция с персонализацией и доставкой.
Лучшие подарки и сувениры https://perm-suveniry.ru нанесение логотипа, подарочные наборы, промо-продукция и деловые аксессуары для мероприятий и компаний.
Нужна бытовая химия? бытовая химия для дома моющие и чистящие средства, порошки и гели. Удобный заказ онлайн, акции и доставка по городу и регионам.
UEFA Champions League https://sampiyonlar-ligi.com.az matches, results, and live scores. See the schedule, standings, and draw for Europe’s premier club competition.
Free online games 1001.com.az for your phone and computer. Easy navigation, quick start, and a variety of genres with no downloads required.
mobiln? casino casino-cz-15.com .
ruleta online casino-cz-15.com .
hrac? automaty online hrac? automaty online .
cz online casina cz online casina .
casino bonus bez vkladu casino bonus bez vkladu .
?esk? online casina ?esk? online casina .
nov? online casino nov? online casino .
mostbet plinko strategiya http://mostbet69573.help/
mostbet Oʻzbekistonda stavka https://mostbet69573.help/
mostbet Oʻzbekiston ios http://mostbet69573.help
Мы пишем о детях и воспитании с вниманием к деталям, рассказываем о новинках индустрии красоты и помогаем ориентироваться в мире моды. Наш журнал создан для вдохновения и поддержки. Переходите по ссылке и открывайте новые материалы https://universewomen.ru/
выездной шиномонтаж 24 https://vyezdnoj-shinomontazh-77.ru
шумоизоляция арок авто https://shumoizolyaciya-arok-avto-77.ru
Трезвый выбор http://www.med-2c.ru/kak-proxodit-vyvod-iz-zapoya-na-domu-v-peterburge-podrobnyj-razbor-procedury-i-chego-ozhidat/ .
trezviy vibor https://www.med-2c.ru/kak-proxodit-vyvod-iz-zapoya-na-domu-v-peterburge-podrobnyj-razbor-procedury-i-chego-ozhidat/ .
Посещение шоурума в Москве часто превращается в отдельное событие. Уютная атмосфера, внимание к деталям и возможность примерить вещи в спокойной обстановке создают совершенно другой уровень сервиса. Это удобная альтернатива шумным торговым центрам: https://forextema.com/index.php?option=com_easyblog&view=entry&id=14407&Itemid=75
Медицинский сайт https://nogostop.ru об анатомии, патологиях и способах лечения. Симптомы, профилактика, современные препараты и рекомендации врачей в доступной форме.
Информационный портал https://diok.ru о событиях в мире, экономике, науке, автомобильной индустрии и обществе. Аналитика, обзоры и ключевые тенденции.
trezviy-vibor https://detkiportal.ru/vyvod-iz-zapoya-v-donecke-anonimno/ .
trezviy vibor drplas.ru/blefaroplastika/reabilitatsiya/narkolog-na-dom-v-volgograde.html .
trezviy vibor https://www.kuban-mama.ru/wp-prochee/vyvod-iz-zapoya-v-rostove-na-donu.html .
Сайт о фермерстве https://webferma.com и садоводстве: посадка, удобрения, защита растений, теплицы и разведение животных. Полезные инструкции и современные агротехнологии.
Справочный IT-портал https://help-wifi.ru программирование, администрирование, кибербезопасность, сети и облачные технологии. Инструкции, гайды, решения типовых ошибок и ответы на вопросы специалистов.
Новости и обзоры https://mechfac.ru о мире технологий, экономики, крипторынка, культуры и шоу-бизнеса. Всё, что важно знать о современном обществе.
В московских шоурумах можно собрать гардероб для разных сфер жизни от работы до отдыха. Продуманная структура ассортимента облегчает этот процесс. Подробнее по ссылке – https://1wum.ru/forum/?PAGE_NAME=profile_view&UID=54714&MUL_MODE=
капитальный ремонт зданий капитальный ремонт зданий .
кв дизайн интерьеры дизайн интерьера услуги
Все самое интересное новостной сайт с лентой последних событий, аналитикой и комментариями экспертов. Оперативные публикации и аналитика каждый день.
Новый Apple iPhone 17 купить в СПб уже в продаже в Санкт?Петербурге! В интернет?магазине i4you вас ждёт широкий выбор оригинальных устройств Apple по выгодным ценам. На каждый смартфон действует официальная гарантия от производителя сроком от года — вы можете быть уверены в качестве и долговечности покупки.
Планируешь ремонт? ремонт ванной комнаты от косметического обновления до капитальной перепланировки. Индивидуальный подход, современные технологии и официальное оформление договора.
выполнение курсовых работ выполнение курсовых работ .
Проблемы с зубами? альбадент профилактика, лечение, протезирование и эстетическая стоматология. Забота о здоровье зубов с применением передовых методик.
Professional сonstruction Moraira: architecture, engineering systems, and finishing. We work with local regulations and regional specifics in mind. We handle permitting and material procurement so you can enjoy the creative process without the stress of management.
Охраны труда для бизнеса центр охраны труда аудит системы безопасности, обучение персонала, разработка локальных актов и внедрение стандартов. Помогаем минимизировать риски и избежать штрафов.
курсовые под заказ курсовые под заказ .
Получение медицинской https://gira-spravki2.ru справки с доставкой после официального оформления. Комфортная запись, минимальные сроки и законная выдача документа.
Орби казино https://orby-casino.com/ онлайн-платформа с широким выбором слотов, настольных игр и бонусных предложений. Узнайте об акциях, турнирах и возможностях для комфортного игрового досуга.
Онлайн казино Орби orby casino com большой выбор слотов, бонусы для новых и постоянных игроков, регулярные турниры с призами.
Чудові бонуси казино — депозитні бонуси, бездепозитні бонуси та Турнір з призами. Обзори пропозицій і правила участі.
Найпопулярніша платформа інтернет казіно – популярні слоти, бонуси та турніри з призами. Огляди гри та правила участі в акціях.
решение курсовых работ на заказ решение курсовых работ на заказ .
Найкращі онлайн ігри казино – безліч ігрових автоматів, правил, бонусів покерів і. Огляди, новинки спеціальні
Квартиры в новостройках https://domik-vspb.ru от застройщика — студии, однокомнатные и семейные варианты. Сопровождение сделки и прозрачные условия покупки.
где можно купить курсовую работу где можно купить курсовую работу .
купить курсовую купить курсовую .
Carbon credits https://offset8capital.com and natural capital – climate projects, ESG analytics and transparent emission compensation mechanisms with long-term impact.
шумоизоляция авто
Свежие новости SEO https://seovestnik.ru и IT-индустрии — алгоритмы, ранжирование, веб-разработка, кибербезопасность и цифровые инструменты для бизнеса.
Здравствуйте дорогие друзья! Сегодня затронем тему — гидроизоляция коммерческой недвижимости. Суть здесь в чем: мокрые потолки — головная боль. Ищешь решение — могу рекомендовать: https://montazh-membrannoj-krovli-spb.ru. Как правило знаю, что коммерческие объекты нуждаются в гарантиях. Ну вот арендаторы ждут — соответственно работы идут быстро. На первом этапе отражающие покрытия — крыша не перегревается. Что в итоге: это работает сохранить здание.
Бассейн на даче под ключ цена https://atlapool.ru
Последние обновления: https://parfum-mir.ru/internet-magazin/folder/jenifer-lopez/
Нужны казино бонусы? https://kazinopromokod.ru — бонусы за регистрацию и пополнение счета. Обзоры предложений и подробные правила использования кодов.
Онлайн покер покерок официальный сайт — турниры с крупными гарантиями, кеш-игры и специальные предложения для игроков. Обзоры форматов и условий участия.
сделать реферат сделать реферат .
Все о фундаменте https://rus-fundament.ru виды оснований, расчет нагрузки, выбор материалов и этапы строительства. Практичные советы по заливке ленточного, плитного и свайного фундамента.
Портал о жизни в ЖК https://pioneer-volgograd.ru инфраструктура, паркинг, детские площадки, охрана и сервисы. Информация для будущих и действующих жителей.
Все о ремонте квартир https://belstroyteh.ru и отделке помещений — практические инструкции, обзоры материалов и современные решения для интерьера.
Всё про строительство https://hotimsvoydom.ru и ремонт — проекты домов, фундаменты, кровля, инженерные системы и отделка. Практичные советы, инструкции и современные технологии.
Найкращі бонуси казино — депозитні акції, бездепозитні пропозиції та турніри із призами. Огляди та порівняння умов участі.
Грати в найкраще казіно ігри — широкий вибір автоматів та настільних ігор, вітальні бонуси та спеціальні пропозиції. Дізнайтеся про умови участі та актуальні акції.
реферат нейросеть реферат нейросеть .
ии реферат ии реферат .
Здравствуйте дорогие друзья! Очень актуальная тема — выбор кровельного материала. Здесь такой момент: если нужен профессиональный монтаж — могу рекомендовать сервис: https://montazh-membrannoj-krovli-spb.ru. На практике убедился, что ПВХ мембрана — один из самых эффективных способов гидроизоляции. Например, битум плавится на солнце — соответственно мембрана этого лишена. Основные этапы: выбрать толщину мембраны. Вместо заключения: реальный эффект — крыша без проблем на годы.
сайт для рефератов сайт для рефератов .
Грати в найкращі слоти – великий каталог автоматів, бонуси за реєстрацію та регулярні турніри. Інформація про умови та можливості для гравців.
Онлайн ігри казино онлайн – великий вибір автоматів, рулетки та покеру з бонусами та акціями. Огляди, новинки та спеціальні пропозиції.
нейросеть для школьников и студентов нейросеть для школьников и студентов .
slot oyunu https://mineslot.club/tr/ piksel grafikler, bonus ogeler ve ilgi cekici mekanikler. Oyunun kurallar? ve ozellikleri hakk?nda bilgi edinin.
slot oyunu minecraft slotu piksel grafikler, bonus ogeler ve ilgi cekici mekanikler. Oyunun kurallar? ve ozellikleri hakk?nda bilgi edinin.
slot mine drop nasil oynanir oyunu, modern grafiklere ve ozgun bir konsepte sahip. Oyunun format?, bahis secenekleri ve oynan?s ozellikleri hakkinda daha fazla bilgi edinin.
Попробуйте https://zeusvshades250.com/ru/ — игровой автомат с мифологическим сюжетом, бонусными раундами и оригинальной механикой.
A catalog of cars https://www.auto.ae/catalog/ across all brands and generations—specs, engines, trim levels, and real market prices. Compare models and choose the best option.
A convenient car catalog https://auto.ae/catalog/ brands, models, specifications, and current prices. Compare engines, fuel consumption, trim levels, and equipment to find the car that meets your needs.
Wiadomosci tenisowe https://teniswiadomosci.pl z Polski i ze swiata: najnowsze wyniki meczow, rankingi zawodniczek, analizy turniejow i wywiady z zawodniczkami. Sledz wydarzenia ATP i WTA, dowiedz sie o zwyciestwach, niespodziankach i najwazniejszych meczach sezonu.
проект на водопонижение xn—77-eddkgagrc5cdhbap.xn--p1ai .
вакуумное водопонижение иглофильтрами xn—77-eddkgagrc5cdhbap.xn--p1ai .
mostbet восстановить пароль http://www.mostbet61527.help
Julie Cash http://www.juliecash.online on OnlyFans features exclusive content, private posts, and regular updates for subscribers. Subscribe to gain access to original content and special offers.
водопонижение строительных котлованов водопонижение строительных котлованов .
водопонижение котлована xn—77-eddkgagrc5cdhbap.xn--p1ai .
mostbet слоты на деньги http://www.mostbet61527.help
мостбет приложение 2026 http://www.mostbet61527.help
водопонижение котлована иглофильтрами xn—77-eddkgagrc5cdhbap.xn--p1ai .
sms activation github.com/SMS-Activate-Alternatives .
осушение котлованов осушение котлованов .
sms activate website sms activate website .
sms activation github.com/SMS-Activate-Alternatives .
mostbet пополнить счет 2026 mostbet пополнить счет 2026
mostbet создать аккаунт https://www.mostbet61527.help
Играешь в казино? https://eva-vlg.ru популярная онлайн-платформа с большим выбором слотов, настольных игр и лайв-казино. Бонусы для новых игроков, регулярные акции и удобные способы пополнения доступны круглосуточно.
1win Dota 2 tikish https://www.1win5767.help
1win plinko o‘yin https://1win5767.help/
1win Oson depozit 1win Oson depozit
Нужны столбики? столбики ограждения с вытяжной лентой столбики для складов, парковок и общественных пространств. Прочные материалы, устойчивое основание и удобство перемещения обеспечивают безопасность и порядок.
купить провод проводка купить
вывод из запоя в ростове-на-дону вывод из запоя в ростове-на-дону .
вывод из запоя цена в ростове vyvod-iz-zapoya-v-rostove-2.ru .
вывод из запоя в ростове-на-дону на дому vyvod-iz-zapoya-v-rostove-2.ru .
вывод из запоя в ростове на дону на дому vyvod-iz-zapoya-v-rostove-2.ru .
магазин свадебных платьев каталог свадебных платьев с ценами
Нужны столбики? металлические столбики ограждение столбики для складов, парковок и общественных пространств. Прочные материалы, устойчивое основание и удобство перемещения обеспечивают безопасность и порядок.
шумоизоляция торпеды
шумоизоляция дверей авто https://shumoizolyaciya-dverej-avto.ru
интернет кабель купить магазин электрики в минске
наркологическая клиника в ростове вывод из запоя vyvod-iz-zapoya-v-rostove-2.ru .
вывод из запоя в стационаре в ростове на дону вывод из запоя в стационаре в ростове на дону .
Нужны столбики? столбики ограждения с вытяжной лентой столбики для складов, парковок и общественных пространств. Прочные материалы, устойчивое основание и удобство перемещения обеспечивают безопасность и порядок.
купить провод 2 2 кабель минск
mostbet казино регистрация mostbet казино регистрация
мобильные стойки ограждения мобильные стойки с вытяжной лентой
свадебные платья цена купить https://svadebnye-platya-msk.ru
Publicaciones unicas amouranth noticias de vanguardia y contenido original. Mantengase al dia y no se pierda ninguna novedad.
La pagina oficial de https://evaelfie.es ofrece contenido exclusivo, noticias de ultima hora y actualizaciones periodicas. Mantengase al dia con las nuevas publicaciones y anuncios.
99 down caiu.site .
99 caiu caiu.site .
MMORPG игра Скрайд — онлайн-мир приключений, сражений и развития персонажа. Выбирайте класс героя, исследуйте локации, участвуйте в PvP и PvE боях, вступайте в гильдии и проходите квесты в захватывающей многопользовательской игре.
Мучает варикоз? эвлк информационный сайт о здоровье вен и лечении варикоза ног: УЗДС диагностика, лечение варикоза, ЭВЛО (лазерное лечение), склеротерапия, восстановление и компрессионный трикотаж. Рекомендации врача, ответы на частые вопросы и профилактика варикоза.
Found a bride? wedding proposal in Barcelona romantic scenarios, beautiful locations, photo shoots, decor, and surprises for the perfect declaration of love. Make your engagement in Barcelona an unforgettable moment in your story.
mostbet бонус на депозит mostbet бонус на депозит
мостбет apk Киргизия https://mostbet96810.help
mines игра мостбет mines игра мостбет
Нужен юрист? адвокат по арбитражным спорам представительство в арбитражном суде, защита интересов бизнеса, взыскание задолженности, споры по договорам и сопровождение судебных процессов для компаний и предпринимателей.
стойкие духи женские https://elicebeauty.com/makiyazh/litso/tonalnie-sredstva/ss-krem-volshebniy-makiyazh-lirene-cc-sream-magic-make-up.html
mostbet двухфакторная защита mostbet двухфакторная защита
мостбет верификация сколько дней https://mostbet96810.help
заказать кухню с установкой zakazat-kuhnyu-4.ru .
Dwuspadowe aluminiowe zadaszenia tarasowe https://aluminum-etrrace-canopies.ru
Нужна гостиница? гостиница площадь ильича уютные номера рядом с метро и деловым центром города. Удобное размещение для туристов и деловых поездок, комфортные условия проживания, современный сервис и удобная транспортная доступность.
заказать кухню по индивидуальному проекту zakazat-kuhnyu-4.ru .
заказать кухню с доставкой zakazat-kuhnyu-4.ru .
мостбет вход в личный кабинет mostbet15247.help
mostbet ios Кыргызстан https://mostbet96810.help/
1вин пополнение счета в сумах https://1win36247.help/
1win официальный apk 1win68017.help
Should I propose to a girl? top-rated proposal venues near Barcelona
1win бонус за первый депозит 1win бонус за первый депозит
1win обновление apk 1win обновление apk
1win mines как выиграть 1win36247.help
1win лайв казино Кыргызстан http://1win68017.help
1вин lucky jet 1вин lucky jet
школа-пансион бесплатно shkola-onlajn-33.ru .
ломоносов скул ломоносов скул .
навес под машину https://zakazat-naves.ru
1win регистрация 1win регистрация
Proposed to a girl proposal in Barcelona
где можно навесы заказать авто навес заказать
игра aviator 1вин игра aviator 1вин
1win актуальная ссылка http://1win68017.help
downdetector brasil caiu.site .
1вин вывод Киргизия https://www.1win20819.help
мелбет кз слоты демо режим мелбет кз слоты демо режим
melbet maib http://melbet42310.help/
internet down caiu.site .
1win демо режим казино 1win демо режим казино
AWS caiu caiu.site .
1win пополнение Bakai Bank 1win пополнение Bakai Bank
мелбет правила бонуса https://www.melbet60432.help
1win не заходит в аккаунт 1win82361.help
A platform for searching https://grand-screen.com and comparing mobile apps. Explore features, reviews, ratings, and user feedback. The Android and iOS app catalog helps you find the best services for work, communication, and entertainment.
Портал о строительстве https://sdhhbsteel.com и промышленности: новости отрасли, технологии, оборудование, строительные материалы и производственные решения. Полезная информация, аналитика и обзоры для специалистов и компаний.
Обзоры дрелей https://drel-interskol.ru и электроинструмента для дома и профессиональной работы. Сравнение моделей, характеристики, преимущества и недостатки популярных дрелей. Полезные советы по выбору инструмента для ремонта, строительства и бытовых задач.
Сертификация товаров http://www.certif-test.ru представляет собой официальный процесс подтверждения соответствия продукции установленным стандартам качества, безопасности и экологичности. В основе этого понятия лежит проверка изделий независимыми органами на предмет соблюдения нормативов, таких как ГОСТ, ISO или отраслевые требования. Что такое сертификация товаров? Это не просто формальность, а комплекс мер, включающих лабораторные тесты, аудит производства и выдачу сертификата, который служит доказательством надежности продукта. Без сертификации многие товары не допускаются на рынок, особенно в сферах пищевой промышленности, электроники и медицинских изделий, где риски для здоровья потребителей особенно высоки.
Сертификация товаров http://www.vnii-certification.ru это процесс официального подтверждения соответствия продукции установленным стандартам качества, безопасности и экологичности. В современном мире, где потребители все чаще обращают внимание на надежность и происхождение товаров, сертификация играет ключевую роль в обеспечении доверия на рынке. Она помогает производителям и поставщикам демонстрировать, что их продукция соответствует нормам, а также защищает интересы покупателей. Существуют различные типы сертификации товаров, которые можно разделить на обязательную и добровольную, каждая из которых имеет свои особенности и цели. В этой статье мы разберем, что такое сертификация товаров и почему она важна для бизнеса и потребителей.
Аренда авто Сочи https://avto-arenda-sochi.ru
monro casino online https://azastroteam.ru
SEO-продвижение https://outreachseo.ru сайта для роста посещаемости и увеличения продаж. Проводим аудит, оптимизацию структуры, работу с контентом и техническими параметрами сайта, чтобы улучшить позиции в поисковых системах и привлечь целевой трафик.
1win игра aviator https://www.1win17043.help
mostbet cashback https://mostbet63218.help/
кольцо из белого золота цена кольцо для помолвки
Find out the exact https://www.the-weather-in-budva.com today. Detailed 7- and 10-day forecasts, including temperature, wind, precipitation, humidity, and pressure. Up-to-date weather information for Budva on the Adriatic coast for tourists and residents.
Если вы подбираете лучшие казино на рубли, смотрите шире, чем просто наличие RUB в кассе. Важно, чтобы рублёвые операции были реально удобными: без лишних шагов, с адекватными лимитами и понятными правилами по выводу (часто встречается требование выводить тем же методом, что пополняли). Мы публикуем свежие подборки и обновления по таким площадкам в Telegram – там проще сравнить варианты и выбрать подходящий. https://t.me/s/rating_casino_russia/25
Explore detailed insights on https://topxclocks.com/dbtech-clocks/ dbtech clocks at TopXClocks, including features, comparisons, and expert recommendations for smarter buying decisions.
Информационный портал https://tga-info.ru/ со статьями и обзорами на разные темы. Материалы о технологиях жизни работе доме и повседневных вопросах. Актуальные новости полезные советы рекомендации и интересная информация для читателей.
Интернет ресурс https://nesmetnoe.ru/ с полезными статьями советами и обзорами. Материалы о жизни здоровье технологиях доме и повседневных вопросах. Практические рекомендации интересные факты и актуальная информация для широкой аудитории.
mostbet karta fotosi mostbet karta fotosi
Статьи о любви https://lifeoflove.ru отношениях, психологии и семейной жизни. Советы по гармоничным отношениям общению и саморазвитию. Полезные рекомендации вдохновляющие истории и материалы для тех кто хочет улучшить личную жизнь.
Материалы о компьютерах https://www.hardexpert.net технологиях электронике и IT. Обзоры техники советы по выбору комплектующих настройке программ и использованию устройств. Полезная информация для пользователей и любителей технологий.
Сборник полезных советов https://allsekrets.ru и лайфхаков на каждый день. Материалы о доме здоровье красоте и повседневной жизни. Интересные статьи практические рекомендации и идеи которые помогут упростить бытовые задачи.
Информация о ремонте https://hyundai-sto.ru обслуживании и диагностике автомобилей Hyundai. Советы по техническому обслуживанию выбору запчастей и эксплуатации автомобиля. Полезные материалы для владельцев и автолюбителей.
mostbet Oʻzbekiston android mostbet Oʻzbekiston android
Лучшие сервера Обзоры и рейтинг хостинг-провайдеров сравнение dedicated servers по цене, производительности и надежности. Рейтинг хостингов, которые предлагают мощные серверные решения.
Найти лучший сервер подобрать качественный VPS рейтинг dedicated servers от популярных хостинг-провайдеров. Сравните выделенные серверы по характеристикам, стоимости и возможностям масштабирования для бизнеса и веб-проектов.
Рейтинги серверов https://rating-vps-2026.ru актуальный рейтинг dedicated server хостинга с сравнением характеристик, стоимости и производительности. Найдите оптимальный сервер для бизнеса, интернет-магазина, SaaS-сервисов и крупных сайтов.
Обзор и рейтинги серверов рейтинг VPS сравните выделенные серверы по характеристикам, цене, процессорам и дискам SSD. Выберите надежный сервер для размещения сайтов, приложений и высоких нагрузок.
Профессиональный запой выезд дом детоксикация организма, помощь при алкогольной интоксикации и восстановление самочувствия пациента. Специалист приезжает на дом и оказывает профессиональную помощь.
Гарантированный безопасный запой нарколог дом вывод из запоя с наблюдением, детоксикацией организма и поддержкой врача. Процедуры направлены на восстановление состояния пациента и улучшение самочувствия.
mostbet rasmiy havola http://www.mostbet28461.help
mostbet location required https://mostbet53160.help/
mostbet ingyenes nyerőgépek http://www.mostbet2023.help
Cost-effective marketplace social media youtube profiles offers competitive rates without compromising on account quality, verification completeness, or delivery speed. The catalog is segmented by platform, geo, account type, and price tier to simplify navigation for both new and returning customers. Build your campaigns on accounts with proven trust — higher trust means better delivery, lower costs, and fewer interruptions.
Інформаційний портал https://pensioneram.in.ua для пенсіонерів України Корисні поради про пенсії, соціальні виплати, пільги, здоров’я та повсякденне життя. Актуальні новини, рекомендації фахівців та прості пояснення важливих змін законодавства.
Сайт про народні прикмети https://zefirka.net.ua тлумачення снів та значення імен. Дізнайтеся, що означають сни, як трактуються прикмети та які традиції пов’язані зі святами різних народів.
Сайт міста Дніпро https://faine-misto.dp.ua з актуальними новинами, подіями та корисною інформацією для мешканців та гостей. Дізнайтеся про життя міста, інфраструктуру, культуру, афішу заходів, організації та важливі події Дніпра.
Чоловічий блог https://u-kuma.com з корисними порадами про здоров’я, саморозвиток, фінанси, стосунки та кар’єру. Публікуємо цікаві статті, лайфхаки та рекомендації для чоловіків, які хочуть покращити своє життя.
Жіночий сайт https://u-kumy.com про красу, здоров’я, моду, відносини і стиль життя. Корисні поради, статті, ідеї для натхнення та рекомендації для сучасних жінок. Читайте про саморозвиток, сім’ю, догляд за собою та актуальні тренди.
Sports betting at Mostbet https://mostbet.edu.pl/. The platform offers a wide range of events, high odds, bonuses, and a user-friendly mobile app. Place bets on football, hockey, tennis, and other sports.
Perfect Date official https://www.perfect-date.org website offers detailed information about the characters, plot, and gameplay features. Read the news and stay up-to-date on the latest updates.
аудит продвижения сайта prodvizhenie-sajtov-v-moskve16.ru .
Treasure of Nadia https://treasure-of-nadia.org Official Game Site with detailed information about the adventure game. Read news, learn about the characters, and learn about the gameplay features.
Женский портал https://7krasotok.com о красоте, здоровье, моде и отношениях. Полезные советы, статьи о семье, психологии и саморазвитии. Читайте рекомендации экспертов, узнавайте о трендах и находите вдохновение для гармоничной жизни.
Женский онлайн https://krasotka-fl.com.ua портал с полезными материалами о красоте, здоровье, моде и отношениях. Советы по уходу за собой, психологии и саморазвитию для современной женщины.
сделать аудит сайта цена prodvizhenie-sajtov-v-moskve16.ru .
Любишь азарт? pin-up casino зеркало предлагает разнообразные игровые автоматы, настольные игры и интересные бонусные программы. Платформа создана для комфортной игры и предлагает широкий выбор развлечений.
продвижения сайта в google продвижения сайта в google .
seo partner program prodvizhenie-sajtov-v-moskve16.ru .
Широкий выбор ковров представлен в интернет магазине нашего города Краснодар, подходящий для всех стилей интерьера.
Ковер шерстяной
Наш приоритет – своевременная и целостная доставка каждого заказа.
pinup tez kirish http://www.pinup76809.help
Консультация семейного юриста поможет быстро разобраться в сложных жизненных ситуациях: развод, раздел имущества, алименты, споры о детях и брачные договоры. Перейдя по запросу юрист по семейному законодательству – специалист объяснит ваши права, оценит перспективы дела и предложит оптимальный план действий. Получите профессиональную юридическую помощь и ответы на все вопросы по семейному праву.
мостбет доступ сегодня мостбет доступ сегодня
nye-online-kasinoer-med-gratis-triks
Take a look at my web page; spiny
no-deposit-codes-canada-casino-keep-what-you-win
Also visit my site … golden – Gena,
como-se-gana-en-el-casino-online
My web page … maquinitas
рейтинг диджитал агентств рейтинг диджитал агентств .
закупка ссылок в гугл заказать услугу агентство закупка ссылок в гугл заказать услугу агентство .
статьи про маркетинг и seo статьи про маркетинг и seo .
mostbet pul nə vaxt çıxır http://www.mostbet85214.help
mostbet indir https://mostbet85214.help/
интернет маркетинг агентство интернет маркетинг агентство .
материалы по seo материалы по seo .
seo partner program seo partner program .
сео центр seo-kejsy17.ru .
продвижение сайтов топ агентство reiting-seo-kompanii.ru .
Продвигайте свой аккаунт быстрее с помощью накрутки подписчиков в TikTok. Перейдя по запросу накрутка подписчиков в тикток вы сможете увеличить количество фолловеров, повысить доверие к профилю и привлечь больше просмотров и лайков. Быстрая и безопасная накрутка поможет вашему контенту попасть в рекомендации и ускорить рост аккаунта. Подходит для блогеров, брендов и бизнеса, которые хотят развиваться в TikTok и получать больше охватов.
Откровенные видео можно транслировать на надежных платформах для обеспечения конфиденциальности.
Откройте для себя безопасные веб-сайты
для качественного просмотра.
Review my blog post – Buy Rivotril
рейтинг агентств интернет маркетинга luchshie-digital-agencstva.ru .
блог агентства интернет-маркетинга блог агентства интернет-маркетинга .
детский стоматолог телефон лечение зубов во сне детям
mostbet şəxsiyyət təsdiqi http://www.mostbet85214.help
интернет раскрутка интернет раскрутка .
google посещаемость сайта google посещаемость сайта .
мелбет кэшбэк киргизия мелбет кэшбэк киргизия
рейтинг компаний seo оптимизации reiting-seo-kompanii.ru .
продвижение сайтов продвижение сайтов .
лучшие seo компании лучшие seo компании .
рейтинг seo оптимизации reiting-seo-kompaniy.ru .
получить короткую ссылку google получить короткую ссылку google .
vavada regulamin vavada regulamin
Бесплатная консультация семейного юриста — это возможность быстро разобраться в сложной ситуации и понять свои права. Перейдя по запросу юрист по браку юрист поможет вам по вопросам развода, алиментов, раздела имущества, опеки над детьми и другим семейным спорам. Разъясним перспективы дела и подскажем оптимальное решение. Получите профессиональную помощь без оплаты и лишних обязательств.
закупка ссылок в гугл заказать услугу агентство закупка ссылок в гугл заказать услугу агентство .
продвижение сайтов в москве продвижение сайтов в москве .
сео агентство сео агентство .
Бонусы и фриспины доступны сразу после регистрации https://04civil.com/bbs/board.php?bo_table=free&wr_id=5169
ахревс seo-kejsy17.ru .
продвижение сайтов в москве продвижение сайтов в москве .
продвижения сайта в google продвижения сайта в google .
оптимизация сайта франция оптимизация сайта франция .
vavada promocja mines http://www.vavada56378.help
сео агентство сео агентство .
plinko vavada plinko vavada
vavada ranking turniejowy vavada ranking turniejowy
раскрутка и продвижение сайта раскрутка и продвижение сайта .
vavada potwierdzenie tożsamości https://vavada56378.help
Юридическая консультация по разделу имущества поможет защитить ваши права и избежать ошибок при разводе или спорах между собственниками. Переходите по запросу юридическая консультация по разделу имущества в Москве – юрист оценит ситуацию, разъяснит перспективы дела, подскажет, как правильно оформить документы и выстроить стратегию. Вы получите чёткий план действий и поддержку на каждом этапе — от переговоров до суда.
интернет продвижение москва интернет продвижение москва .
топ seo топ seo .
Официальный сайт https://pokervip.ru: регистрация, вход, бонусы и игра в онлайн покер. Обзор возможностей, турниров, кеш-столов и мобильного приложения. Узнайте, как начать играть и выводить деньги на проверенной платформе.
melbet app melbet app
Check out private jet charter fly which offers instant private jet charter booking to over 5000 airports worldwide.
Check cost of private jet to compare private jet rental costs and find the best hourly rates instantly.
интернет агентство продвижение сайтов сео интернет агентство продвижение сайтов сео .
Компания FarbWood https://farbwood.by предлагает пиломатериалы из сибирской лиственницы для частного и коммерческого строительства в Минске и по всей территории Минска. Мы работаем только с лиственницей сибирской, сосна и ель используются как дополнение к основному ассортименту древесины.
Dedicated platform error bm 9999 helps performance teams find the right account infrastructure for scaling their advertising operations efficiently. Detailed usage guides help buyers understand the differences between softreg, selfreg, farmed, and reinstated account types before purchasing. Build your campaigns on accounts with proven trust — higher trust means better delivery, lower costs, and fewer interruptions.
Experienced supplier common mistakes google ads appeal process 2026 offers complete asset packages including login credentials, recovery access, 2FA codes, cookies, and user-agent data. A loyalty program with cashback on every order makes repeated purchases more cost-effective for teams with regular sourcing requirements. Professional media buying starts with professional tools — source from a marketplace built by advertisers, for advertisers.
Growth-focused store onet instagram is built specifically for performance marketers who value transparency, speed, and predictable account quality. The marketplace serves a global buyer base with English-speaking support available via Telegram for product selection and order management. Scale your advertising operations on a foundation of quality — verified profiles, complete credentials, and expert operational support.
Professional service reddit cpm specializes in accounts optimized for paid campaigns with proper warming history and platform trust markers. The team provides onboarding guidance for new buyers and ongoing operational support for teams managing high-volume campaign portfolios. The most successful media buying teams share one trait: they invest in quality infrastructure before they invest in ad spend.
Leading store can you lose monetization on youtube gives media buyers access to aged, warmed, and verified profiles sorted by geo, trust level, and ad readiness. Orders are processed through a secure checkout system with multiple payment options and encrypted credential delivery via personal dashboard. Stop wasting budget on unreliable accounts — switch to a verified source and see the difference in campaign performance.
Юридическая помощь по защите прав ребенка — это поддержка в самых важных ситуациях: от споров о месте проживания и алиментах до защиты от насилия и нарушения прав в школе. Переходите по запросу детский юрист бесплатно и квалифицированный юрист поможет отстоять интересы ребенка, подготовить документы и представить ваши интересы в суде, обеспечив безопасность и справедливость.
дизайнер спб дизайн студия интерьера санкт петербург
Ароматные композиции ручной работы часто создаются небольшими партиями, что делает каждый подарок уникальным. Такие изделия подходят для подарков на праздники, корпоративные мероприятия или просто для создания уюта дома. Подробности по ссылке https://aroma-lavka.ru/
Нестандартный крепеж по чертежам помогает закрывать монтажные задачи спокойно и без лишней спешки, когда для заказчика важны сроки и качество сборки Это удобно для регулярных поставок и серийной сборки https://metizy-optom-moskva.ru/
мостбет пополнение KGS карта https://www.mostbet78063.help
Тензоприбор предлагает калибровочные гири для весов нужного класса точности и номинальной массы для калибровки весов.
В нашей компании можно купить поверочные гири классов точности E1, E2, F1, F2, M1, M2.
Чем выше класс точности, тем меньше будет разница между номинальным и действительным значениями массы калибровочной гири.
mostbet mines qoidalari mostbet mines qoidalari
1win registratsiya 2026 https://www.1win5765.help
Best guide best headphones under 200 for finding quality headphones under 100 dollars with excellent sound reproduction.
Дополнительная информация: высокополигональная и низкополигональная модель агр
Юридическая консультация по лишению родительских прав поможет оценить ситуацию, определить основания и выстроить грамотную стратегию защиты или подачи иска. Переходите по запросу адвокат по родительским правам – специалист разъяснит порядок действий и подготовит документы. Получите профессиональную поддержку и ответы на все вопросы уже на первой консультации.
заказать букет цветов в москве с доставкой на дом недорого http://www.zakazat-cveti-moskva.ru/ .
Профессиональная помощь детям https://neuropsy-centr.ru с нарушениями речи и развития. Высококвалифицированные врачи, работаем с самыми тяжелыми случаями, 99% положительных отзывов, новейшее оборудование и инвентарь. Государственная лицензия: Л035-01298-77/01604531 от 09.12.24
Платная частная клиника https://mypsyhealth.ru/services/drug-treatment-hospital психиатрии, неврологии и наркологии — анонимное лечение и консультации специалистов. Диагностика, помощь при зависимостях, неврологических и психических расстройствах. Конфиденциальность, опытные врачи и комфортные условия.
Top branding agencies https://topbrandagencies.com worldwide: the best studios for brand development, corporate identity, and positioning. Portfolio reviews, strategies, and case studies will help you choose a reliable agency for business development and brand enhancement.
Top web design https://webdesignfirmshub.com companies worldwide: a selection of the best studios for website and interface creation. Learn about case studies, design approaches, UX/UI solutions, and innovations to help you choose a reliable contractor for your digital projects.
An astrology portal burcler com az with daily horoscopes, natal charts, and forecasts. Online consultations, zodiac sign compatibility, and personalized recommendations will help you better understand yourself and make important decisions.
Использую рейтинги легальных казино перед тем, как начать играть. Это позволяет сразу выбрать надежную площадку. Понравилось, что есть реальные отзывы и оценки. Информация подана честно и без навязывания. Отличный помощник для игроков, казино с пополнением через сбп
Бесплатная консультация юриста по вопросам опеки и усыновления поможет разобраться в правах, подготовке документов и порядке оформления. Переходите по запросу юридическая консультация по вопросам усыновления – специалист подскажет, как действовать в вашей ситуации, оценит риски и предложит оптимальное решение. Получите профессиональную помощь по делам опеки и попечительства на каждом шаге без лишних затрат.
Все новостройки https://tut-novostroyki.ru от застройщиков в Новосибирске — актуальный каталог квартир в новых ЖК. Цены, планировки, сроки сдачи и акции. Подберите квартиру напрямую от застройщика без комиссии с удобным поиском и проверенной информацией.
Шпаклевка стен https://shpaklevka-sten.ru и потолков в Москве — выравнивание поверхностей под покраску и обои. Качественные материалы, опытные мастера и соблюдение технологий. Выполняем работы быстро, аккуратно и с гарантией результата по доступной цене.
Автомобільний портал https://avtogid.in.ua новини авто, огляди, тести та поради водіям. Дізнавайтесь про нові моделі, технології, ремонт і обслуговування. Все про автомобілі в одному місці для власників і автолюбителів.
Сайт міста Житомир https://faine-misto.zt.ua новини, події, афіша та довідник компаній. Актуальна інформація про життя міста, транспорт, послуги і заклади. Усе необхідне для мешканців і гостей Житомира в одному зручному онлайн-порталі.
Блог Києва https://infosite.kyiv.ua події, новини, цікаві місця та корисні поради для мешканців і гостей столиці. Дізнавайтесь про актуальні заходи, життя міста, розваги та сервіси. Все найцікавіше про Київ в одному зручному онлайн-блозі.
У місті Одеса https://u-misti.odesa.ua актуальні новини, події, афіша та корисна інформація для мешканців і гостей. Дізнавайтесь про життя міста, транспорт, заклади і послуги. Все найважливіше про Одесу в одному зручному онлайн-порталі.
Хмельницький онлайн https://u-misti.khmelnytskyi.ua міський портал з новинами, афішею та довідником. Дізнавайтесь про події, транспорт, бізнес і послуги. Усе для комфортного життя та відпочинку в Хмельницькому в одному місці.
Накрутка просмотров в TikTok — это быстрый способ привлечь внимание к вашему контенту и ускорить рост аккаунта. Переходите по запросу просмотры тик ток купить и величьте показатели популярности, повысьте доверие аудитории и попадите в рекомендации. Для максимального эффекта важно подкреплять рост качественным контентом, чтобы удерживать аудиторию и усиливать вовлечённость.
У місті Львів https://u-misti.lviv.ua актуальні новини, події, афіша та корисна інформація для мешканців і гостей. Дізнавайтесь про життя міста, транспорт, заклади і послуги. Все найважливіше про Львів в одному зручному онлайн-порталі.
У місті Вінниця https://u-misti.vinnica.ua новини, афіша заходів, довідник закладів і корисні сервіси. Дізнавайтесь про події, відкривайте нові місця і плануйте свій час у Вінниці легко та зручно.
Київ онлайн https://u-misti.kyiv.ua міський портал з новинами, афішею та довідником. Дізнавайтесь про події, транспорт, бізнес і послуги. Усе для комфортного життя та відпочинку в Києві в одному місці.
Міський сайт Дніпра https://u-misti.dp.ua новини, події, оголошення і довідник організацій. Зручний пошук послуг, закладів і маршрутів. Будьте в курсі життя міста та знаходьте потрібну інформацію швидко.
Міський сайт Черкас https://u-misti.cherkasy.ua новини, події, оголошення і довідник організацій. Зручний пошук послуг, закладів і маршрутів. Будьте в курсі життя міста та знаходьте потрібну інформацію швидко.
Все самое свежее здесь: https://novostroi-tour.ru
Услуга накрутки просмотров на канал YouTube поможет быстро увеличить активность под вашими видео и привлечь внимание аудитории. Переходите по запросу как увеличить просмотры в ютубе Кворк. Дополнительные просмотры повышают видимость роликов в рекомендациях, улучшают статистику канала и создают эффект популярности. Подходит для продвижения новых и существующих видео, увеличения охвата и ускоренного роста канала на YouTube.
Только лучшие материалы: https://vnutridoma-spb.ru
Все лучшее здесь: https://proecostroj.ru
дизайн интерьера квартиры в цвете дизайн квартиры
купить в москве цветы недорого http://dostavka-cvetov-moskva495.ru .
Are you into rafting? rafting in montenegro on the tara river exciting rafting trips down mountain rivers with experienced instructors. A tour of the Tara Canyon offers scenic routes, safety, and unforgettable experiences. Book a rafting tour and discover an active holiday.
Nowoczesny sufit napinany odświeża mieszkanie. Taki wybór ukrywa nierówności stropu i poprawia estetykę. Dostępne są warianty PVC oraz tkaninowe, co sprawia że przestrzeń prezentuje się lekko https://sufity-napinane-wroclaw.pl/
Zahnprobleme? dentaltourismus in Montenegro zahnbehandlung im Ausland mit bis zu 70 % Ersparnis. Implantate, Zahnersatz, asthetische Zahnheilkunde und Diagnostik in modernen Kliniken. Wir unterstutzen Sie bei der Wahl des Landes und der Klinik und organisieren Ihre Reise von A bis Z.
Маркетплейс 1С-Битрикс — это официальный каталог готовых решений, модулей и интеграций для сайтов на платформе Bitrix. Переходите по запросу магазин расширений Битрикс и вы найдете расширения для интернет-магазинов, CRM, SEO, аналитики, платежных систем и автоматизации бизнеса. Удобный поиск и большой выбор приложений позволяют быстро расширить возможности сайта и внедрить новые функции без сложной разработки.
металлический значок пин изготовление металлических значков на заказ в москве
заказать металлический значок изготовление железных значков
значок металлический цена https://izgotovlenie-znachkov-moskva.ru/
цветы доставка москва недорого и красиво dostavka-cvetov-moskva495.ru .
металлический закатный значок изготовление металлических значков на заказ в москве
Лучшие порносайты предлагают высококачественный контент для
взрослых развлечений. Выбирайте
надежные хабы для безопасного и приятного просмотра.
my webpage :: Buy Rivotril
печать металлических значков заказ значков из металла со своим дизайном москва
циклевка паркета болгаркой циклевка старого паркета
mostbet app download https://www.mostbet73618.help
Старый паркет? шлифовка паркета в спб профессиональное восстановление деревянного пола без пыли и лишних затрат. Удаляем царапины, потемнения и старое покрытие, возвращаем гладкость и естественный цвет. Используем современное оборудование, выполняем циклевку, шлифовку и лакировку паркета под ключ с гарантией качества и точным соблюдением сроков.
Ищете надежные лицензии для 1С-Битрикс? Мы предлагаем легальные решения для всех типов проектов: интернет-магазинов, корпоративных сайтов и порталов. Переходите по запросу 1С Битрикс cms цена. Быстрая активация, официальная поддержка и выгодные условия – обеспечьте своему веб-проекту стабильную работу и защиту с надежным ПО уже сегодня!
Старый паркет? шлифовка паркета в спб профессиональное восстановление деревянного пола без пыли и лишних затрат. Удаляем царапины, потемнения и старое покрытие, возвращаем гладкость и естественный цвет. Используем современное оборудование, выполняем циклевку, шлифовку и лакировку паркета под ключ с гарантией качества и точным соблюдением сроков.
покупка цветов http://www.cvejie-cveti.ru .
The best of the best: https://cfppa-forestiers.fr/better-on-line-blackjack-gambling-enterprises-in-the-2026/
цветы с самовывозом http://www.cvejie-cveti.ru .
Recommended reading: https://rubisplaza.rw/?p=39872
служба доставки цветов москва http://www.cvejie-cveti.ru/ .
Лицензия «Битрикс: Управление сайтом – Старт» — оптимальное решение для создания небольшого сайта, лендинга или корпоративной страницы. Переходите по запросу 1C Битрикс Старт. Редакция включает базовые инструменты для управления контентом, готовые модули, защиту сайта и удобную административную панель. Подходит для быстрого запуска проекта на CMS 1C-Битрикс с возможностью дальнейшего масштабирования и перехода на более функциональные редакции.
Dive Deeper: https://macscologistics.com/bronx-cops-suspended-to-possess-presumably-having-sexual-intercourse-inside-station-home-locker-room-once-movies-away-from-steamy-tryst-taken-to-precinct/
доставить цветы в москве cvejie-cveti.ru .
1C-Bitrix: Управление сайтом — редакция Стандарт — это мощная платформа для создания и управления корпоративными сайтами. Переходите по запросу лицензия Bitrix Стандарт. Подходит для компаний, которым нужен функциональный сайт с каталогом, формами, SEO-инструментами и удобной системой администрирования. Решение обеспечивает высокую безопасность, производительность и гибкость масштабирования бизнеса в интернете.
цветы с доставкой по москве недорого https://cvejie-cveti.ru .
PUPIL OF FATE MOTORS https://auto.ae/pupiloffatemotors автосалон премиум авто в Дубае. Продажа роскошных автомобилей, эксклюзивные модели и индивидуальный подбор. Помогаем выбрать, оформить и доставить авто с гарантией качества и высоким уровнем сервиса.
Эко-бытовая химия http://reporter63.ru/content/view/784903/himiya-dlya-uborki-sekrety-effektivnosti-i-bezopasnosti в Санкт-Петербурге — средства для уборки без вредных компонентов. Эффективная очистка, безопасность для здоровья и окружающей среды. Широкий ассортимент и доставка по городу.
Только лучшие материалы: https://mal-paris.ru/products/miss-selene-5ml/
Modern ground fault sensor monitor the condition of electrical networks and protect equipment. They offer rapid fault detection, high accuracy, and reliability for industrial applications.
lengvi pyragu receptai
Битрикс: Управление сайтом Малый Бизнес — функциональная редакция CMS для создания интернет-магазинов и коммерческих проектов. Переходите по запросу 1С Битрикс Малый Бизнес ограничения. Система включает каталог товаров, корзину, онлайн-оплаты, маркетинговые инструменты и интеграцию с 1С. Решение подходит для компаний, которым нужен надежный и масштабируемый сайт с возможностью расширения функционала через модули и интеграции.
Больше на нашем сайте: циклевка паркета без пыли спб
Последние изменения: цены шлифовка лак паркета
Лучшее прямо здесь: шлифовка паркета
Нужны подписчики в Telegram? Поможем быстро увеличить аудиторию вашего канала или группы. Переходите по запросу инвайт подписчиков в телеграм. Предлагаем накрутку живых и активных подписчиков без резких скачков и с минимальными списаниями. Подходит для старта новых каналов, повышения доверия и привлечения органической аудитории. Безопасное продвижение, гибкие объемы заказа и быстрый запуск. Увеличьте популярность вашего Telegram-канала уже сегодня.