
Hola a todos de nuevo!!
¿Cómo van esas vacaciones? Seguro que bien, por eso os traigo un tema bastante interesante y que puede resultar bastante curioso a más de un@. Si os estáis aburriendo en vuestras vacaciones y tenéis una Raspberry Pi y un RTL-SDR (escaner de radio) podéis hacerlo en casa.
Con estas dos cosas puedes hacer un radar aéreo casero y que funciona bastante bien, aprendes a manejarte con Linux, librerías, dependencias, hardware, protocolos y tu resultado lo verás en tiempo real!
Más de un@ dirá, pues yo no tengo lo que hace falta, además, seguro que es caro. Pues os digo que no, además de que ambos dispositivos se pueden usar en infinidad de aplicaciones y es una de las cosas que a todo hacker le gustaría tener en su arsenal de herramientas. Todo este procedimiento se puede hacer tanto bajo Windows como Linux, por lo que, no hay excusa, así que vamos a ello.
Bien, para que sepamos de que va la historia, vamos a utilizar la herramienta Dump1090. Esta herramienta (entre muchas otras cosas) se encarga de procesar la información del sistema ADS-B (Automatic dependent surveillance—broadcast) que todos o prácticamente todos los aviones tienen (empezará a se obligatorio en ciertos paises en 2020). Este sistema es una tecnología de vigilancia cooperativa en la que un avión determina su posición a través de la navegación por satélite y la emite periódicamente, lo que permite realizar su seguimiento. La información puede ser recibida por las estaciones terrestres de control de tráfico aéreo como un reemplazo para el radar secundario ya que no necesita recibir una señal desde tierra para emitir. También, puede ser recibida por otras aeronaves para proporcionar conocimiento de la situación y permitir la auto-separación. Gracias a este sistema ¡nuestra Raspberry Pi podrá ser un radar de tráfico aéreo!. Este sistema normalmente emite una señal se a 1090 Mhz y que nuestro RTL-SDR puede recibir. 🙂
Bueno y, ¿qué hay que hacer o qué necesito?
- Una Raspberry Pi y su fuente de alimentación, acompañado de un cable Ethernet. En mi caso tengo el kit Raspberry Pi 3 B.

- Un espectómetro de radiofrecuencia, también conocido por RTL-SDR (Software Defined Radio). Utiliza generalmente el chip RTL2832U para el procesamiento de la señal recibida de la antena. Algún día hablaré más sobre esta maravillosa herramienta. En mi caso tengo: DVB-T-SDR.

- Una tarjeta microSD (con su adaptador al PC) para la Raspberry Pi. Yo uso una de 8 GB que tenía de andar por casa, que para este caso vale de sobra. Si la queréis seguir usando para otras aplicaciones se os puede quedar corta.
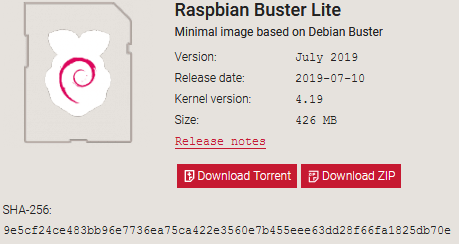
- Raspbian, el sistema operativo Linux basado en Debian que usaremos en la Raspberry Pi. Se puede descargar gratuitamente desde su página oficial. Al ser una tarea que no se requiere nada más que la Raspberry Pi y el RTL-SDR nos descargaremos el SO básico sin sistema gráfico (solo línea de comandos). Las ventajas es que, pesa menos, nos ahorramos la parte gráfica, ya que no usaremos la salida HDMI para nada, y por tanto tampoco el teclado y ratón; con todo esto ahorraremos procesamiento innecesario y sobre todo energía.
Ya tenemos todo lo necesario, ¡manos a la obra!
Para comenzar, tendremos que montar la imagen en la microSD para que la Raspberry Pi pueda acarrancar y use la microSD como memoria persistente, (todos los cambios que se hagan se quedarán guardados incluso si apagamos la Raspberry Pi).
Este punto se puede hacer de muchas formas; la página oficial recomienda el uso de Etcher, que vale tanto para distribuciones Linux como Windows, ya que tiene una interfaz muy amigable. Yo personalmente, siempre uso Rufus, nunca me ha fallado, es portable y me parece el mejor de todos (para gusto los colores), lo malo, es que solo está bajo Windows. Pero como ya he dicho, todo el desarrollo de este procedimiento se puede hacer tanto bajo Windows como bajo Linux, por lo que no habría problema. Elegid el que más os guste.
Conectamos nuestra tarjeta microSD al PC y en mi caso al usar Rufus, ejecutamos Rufus y seleccionamos la imagen del SO, y la microSD. No hay que seleccionar nada más, el resto son opciones avanzadas que no vienen al tema. Listo, ¡damos a empezar!

Una vez que el proceso haya terminado, tendremos la microSD con nuestro sistema operativo Raspbian instalado, y si nos fijamos, tendremos dos particiones. La partición boot que es la que usa para bootear el sistema y la partición rootfs que es donde se encuentra el file system del SO.
Como he mencionado antes, no vamos a usar ni teclado ni ratón ya que no hace falta. Esto acarrea un problema y es que por defecto (por seguridad) el servidor SSH se encuentra deshabilitado y necesitaríamos acceso físico a nuestra Raspberry Pi, y posteriormente, habilitarlo. Pero podemos solucionarlo, solo tendremos que crear un archivo vacío con nombre “ssh” sin extensión en la partición boot.

Listo, cuando arranquemos nuestra RaspberryPi, tendremos el servidor SSH habilitado para poder conectarnos desde nuestro PC. Como es de esperar, es necesario que tengamos acceso remoto a nuestra Raspberry Pi, por lo que lo ideal sería conectar el cable ethernet (que normalmente viene con el router) al puerto Ethernet físico de la Raspberry Pi. Introducimos la microSD y le conectamos la fuente de alimentación a 5V. Aquí podríamos usar o un cargador de móvil de al menos 1 A aunque se recomienda 2.4 A (ya que en el peor de los casos es la mayor corriente que podrá consumir), pero estamos a salvo, ya que éste no será nuestro caso, porque solo tendremos consumiento principalmente nuestro RTL-SDR, el procesador Broadcom y la controladora de ethernet. También podríamos usar una batería portatil (powerbank) que normalmente tienen salida de 1 A y de 2.4 A. Elegid lo que os venga mejor.
Tras unos segundos después del arranque, solo nos quedará saber la IP local que se le ha asignado a nuestra Raspberry Pi, y posteriormente conectarnos usando protocolo SSH.
- En Linux:
root@kali:/home/closer# netdiscover
root@kali:/home/closer# ssh 192.168.1.40 -l pi
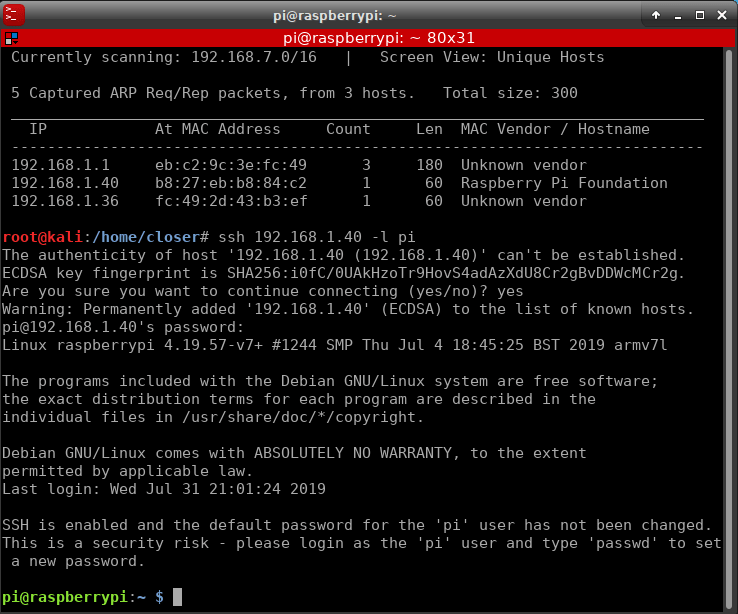
Nos pedirá la contraseña, que es raspberry y aceptaremos la petición de conectarnos ya que se ha generado un fingerprint personalizado para la conexión segura entre nuestro PC y nuestra Raspberry Pi.
Tras aceptar, ¡ya estamos conectados a nuestra Raspberry Pi!
- En Windows:
Por defecto, Windows anteriores a Windows 10 no trae ningún cliente para poder conectarnos por SSH, pero hay herramientas como Putty que nos hace de cliente. Para descargarnos la versión portable, con solo ir a la sección de “Alternative binary files” y seleccionar nuestra versión del binario “putty.exe” (x64 u x86). Si usas Windows 10 (a partir de Abril de 2018) ya viene, por defecto, el cliente SSH.
Una vez en nuestras manos, en la ventana de comandos lanzaremos:
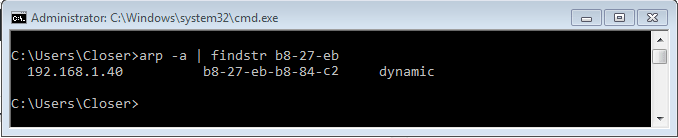
C:\Users\Closer> arp -a | findstr b8-27-eb
Con “arp -a” mostraremos la tabla ARP (Address Resolution Protocol) que se encarga de asociar las IPs dinámicas y estáticas con direcciones MAC. Dado que la tabla ARP puede ser un poco extensa y no tener claro cual es la IP de nuestra Raspberry Pi, podemos filtrarla con “findstr b8-27-eb” ya que en la industria de asignaciones de direcciones MAC cada fabricante se asigna un rango de direcciones MAC, en este caso para Raspberry Pi Fundation tiene asignadas las direcciones MAC B8:27:EB:xx:xx:xx. Por tanto nuestra salida podría quedar tal que:
Ahora, sí, sabiendo a IP a la que nos tenemos que conectar, abrimos Putty (en caso de tenerlo), escribimos la IP, declaramos que queremos conexión por SSH con el puerto 22 (por defecto para TCP) y nos conectaremos:

Nos saldrá el aviso igual que antes en Linux, de confirmar el fingerprint para la conexión segura, aceptamos, y ya tendremos acceso a nuestra Raspberry Pi, nos pedirá usuario para el login que como ya sabéis es pi y la contraseña raspberry.
En caso de tener Windows 10, el comando es el mismo que en Linux.
A partir de aquí, ya es lo mismo tanto para Linux como Windows, yo continuaré en Linux. Vamos a la chicha.
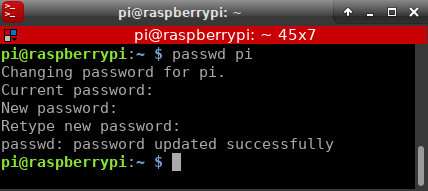
Antes de todo, que no se os olvide cambiar la contraseña por defecto de la Raspberry Pi.
Primeramente y ya que la imagen de nuestra Raspberry Pi puede tener algo de tiempo, es decir, estar algo desactualizada (que haya pasado un tiempo desde la release), y el contenido de los repositorios hayan podido cambiar, esto, nuestro Raspbian no lo sabe. Por tanto, es recomendable actualizar el listado de los paquetes, para tener la versión más reciente de ellos y ver cuáles son necesarios actualizar y a qué versión, en caso de requerir una instalación.
pi@raspberrypi:~ $ sudo apt-get update
Cuando nuestro Raspbian ya tenga el listado de paquetes actualizado, será necesario instalar la dependencias. Diréis ¿dependencias de qué? Las dependencias que son en definitiva librerías (en este caso paquetes) que son necesarias para poder instalar la herramienta con la que vamos a jugar.🙂
Gracias a los buenos repositorios no será necesario complicarnos la vida. Salvo que queramos descargar alguna librería/paquete en específico o a una versión que no esté en los repos, lo ideal sería coger el que nos ofrecen e instalarlo, ya que son librerías que ya están más que probadas y están empaquetadas (nos ahorramos el proceso de compilación y lo que eso conlleva, ya que para ciertas librerías es un poco tedioso). Instalamos las siguientes librerías:
pi@raspberrypi:~ $ sudo apt-get install -y debhelper libusb-1.0-0-dev librtlsdr-dev librtlsdr0 rtl-sdr lighttpd
Si os habéis bajado, por cualquier razón, otra release de Raspbian (con entorno gráfico por ejemplo) puede ser que alguna esté ya instalada. Para este caso, esas librerías son todas necesarias, y de hecho, algunas son dependencias de otras librerías, e importa el orden. Con -y no nos pedirá confirmación de instalación y reserva de memoria en la unidad microSD (todo a “yes”).
Por último, nos queda instalar la herramienta con la que jugaremos. Esta herramienta es la conocida dump1090 aunque a lo largo de su vida (su último desarrollo fue hace 7 años) ha ido mutando y usuarios de Github han ido haciendo forks de ella y hay versiones modificadas y con features nuevas. Hay un par de empresas que hacen uso extensivo de esta herramienta y con sus propias modificaciones, al final os contaré de que van. Nosotros instalaremos la última que hay, llamada dump1090-mutability. He de decir que, no es realmente la última ya que FlightAware hizo un fork de esta y ha introducido nuevas features, pero me he decantado por la mutability porque FA la ha adaptado a su SO modificado. Como ya he dicho, al final comentaré mejor sobre esto.
Bueno, sigamos:
pi@raspberrypi:~ $ sudo apt-get install -y dump1090-mutability
Si todo ha ido bien (que debería), al terminar el proceso de instalación automáticamente se lanza el asistente de configuración del paquete. Donde nos saldrá una ventana como la siguiente:

Nos pedirá que si queremos que se lance automáticamente al iniciar nuestra Raspberry Pi, indicamos “Yes” si queremos que sea así, en caso contrario, tendríamos que lanzarlo a mano cada vez que queramos usarlo. Como mi intención es más adelante seguir añadiendo features a nuestra Raspberry indico que sí.
Por otro lado, este asistente nos ha asignado una configuración por defecto en “/etc/default/dump1090-mutability“. En este punto, se puede hacer dos cosas; si hacemos “dpkg-reconfigure dump1090-mutability” nos volverá a aparecer el asistente que nos irá preguntando una a una, una serie de configuraciones/parámetros (que en su mayoria las dejariamos por defecto) que podríamos ir cambiándolas, o, editar el archivo en la ruta anterior mencionada. Para que no se extense esto, os dejaré la configuración que se encuentra en “/etc/default/dump1090-mutability” que habría que utilizar para que podamos tener nuestro radar de vuelo con las características mínimas (que un futuro podríamos modificar).
El archivo de configuración debería quedar tal:
# dump1090-mutability configuration file
# this is a POSIX shell fragment.
# You can edit this file directly, or use
# "dpkg-reconfigure dump1090-mutability"
# Set to "yes" to start dump1090 on boot.
START_DUMP1090="yes"
# User to run dump1090 as.
DUMP1090_USER="dump1090"
# Logfile to log to
LOGFILE="/var/log/dump1090-mutability.log"
#
# Receiver options
#
# RTLSDR device index or serial number to use
# If set to "none", dump1090 will be started in --net-only mode
DEVICE="0"
# RTLSDR gain in dB.
# If set to "max" (the default) the maximum supported gain is used.
# If set to "agc", the tuner AGC is used to set the gain.
GAIN="max"
# RTLSDR frequency correction in PPM
PPM="0"
#
# Decoding options
#
# If yes, fixes messages with correctable CRC errors.
FIX_CRC="yes"
# If set, supplies a reference location for local position decoding.
LAT="LATITUD"
LON="LONGITUD"
# If set, provides the absolute maximum receiver range used to
# filter bad position reports, and to determine when local position
# decoding is safe to use. Specify this in nautical miles (NM).
MAX_RANGE="300"
#
# Networking options
#
# Port to listen on for raw (AVR-format) input connections. 0 disables.
RAW_INPUT_PORT="30001"
# Port to listen on for raw (AVR-format) output connections. 0 disables.
RAW_OUTPUT_PORT="30002"
# Port to listen on for SBS-format output connections. 0 disables.
SBS_OUTPUT_PORT="30003"
# Port to listen on for Beast-format input connections. 0 disables.
BEAST_INPUT_PORT="30004,30104"
# Port to listen on for Beast-format output connections. 0 disables.
BEAST_OUTPUT_PORT="30005"
# TCP heartbeat interval in seconds. 0 disables.
NET_HEARTBEAT="60"
# Minimum output buffer size per write, in bytes.
NET_OUTPUT_SIZE="500"
# Maximum buffering time before writing, in seconds.
NET_OUTPUT_INTERVAL="1"
# TCP buffer size, in bytes
NET_BUFFER="262144"
# Bind ports on a particular address. If unset, binds to all interfaces.
# This defaults to binding to localhost. If you need to allow remote
# connections, change this.
NET_BIND_ADDRESS=""
#
# Misc options
#
# Interval (in seconds) between logging stats to the logfile. 0 disables.
STATS_INTERVAL="3600"
# Path to write json state to (for use with an external webserver). Blank disables.
JSON_DIR="/run/dump1090-mutability"
# Interval between writing json state (in seconds). 0 disables.
JSON_INTERVAL="1"
# Accuracy of receiver location to write to json state, one of "exact" / "approximate" / "none"
JSON_LOCATION_ACCURACY="approximate"
# Set to yes to log all decoded messages
# This can get large fast!
LOG_DECODED_MESSAGES="no"
# Additional options that are passed to the Daemon.
EXTRA_ARGS=""
Los parámetros de color blanco son los de por defecto o poco relevantes para lo que queremos, y los azules son los que realmente son importantes de cambiar, tal y como dice la configuración. Eso sí, que no se os olvide cambiar los parámetros LATITUD y LONGITUD de la configuración con la latitud y longitud de la ubicación de vuestra Raspberry Pi.
Para terminar, debemos de asegurarnos de que se ha habilitado el uso de la librería lighttpd para dump1090, debería de haberlo hecho al finalizar la instalación de la herramienta. En caso de que no se haya habilitado tendríamos que habilitarla y forzar a reiniciar el servicio con:
pi@raspberrypi:~ $ lighty-enable-mod dump1090
pi@raspberrypi:~ $ sudo service lighttpd force-reload
Por último, reiniciamos el servicio de dump1090-mutability. Se puede hacer de varias formas, como la anterior de lighttpd, usando service, pero también se podría desde el adminitrador de servicios de Linux, systemctl. Elegid el que queráis, para este caso no importa.
pi@raspberrypi:~ $ sudo systemctl restart dump1090-mutability.service
¡Ya lo tenemos todo!
Vamos a la dirección IP de nuestra Raspberry Pi para ver el mapa.
En mi caso http://192.168.1.40/dump1090/gmap.html
¡Mira como queda!
Y ¡así me ha quedado el sistema!
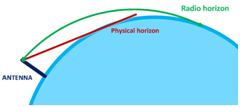
A quien le guste este mundillo, os recomiendo investigar y leer más sobre esto. Además con Dump1090 se puede hacer alguna cosa más, como añadirle trazas de altimetría en el mapa, ya que esto también tiene su estudio. Por ejemplo, hemos puesto que use una distancia de por defecto 300 millas náuticas y que haga uso de la ganancia al máximo, etc, esto a veces no es así o no es lo que queremos, ya que depende mucho de las circunstancias en las que nos encontremos. Como ya he dicho esto tiene su estudio, como por ejemplo la refracción de las ondas, que nos limitará así como si estamos en un sitio bajo, o con árboles, la llegada de las ondas de radio.
En definitiva, a quien le guste esto hay varias plataformas que se dedican a esto exclusivamente y son bastantes buenas, como por ejemplo FlightRadar24 o Flighaware que como ya comenté usan sus variaciones de Dump1090, de hecho, tienen sistemas operativos especializados en esto, es decir un “todo en uno” que lo instalas en tu Raspberry Pi y con acceso a Internet envian los datos a las plataformas, y hacer entre toda la comunidad, un radar de vuelo MUNDIAL. Si estáis interesados, en cada una de las plataformas, os indican como hacerlo paso a paso.
Espero haberme explicado con claridad y que os haya gustado. Si os ha gustado este mundillo, quizás algún día hago un post para capturar la señal de algún satélite que transmite imágenes. 😏
Nos vemos en el siguiente post! 😉
Happy Hacking!
Autor: Rafael Moreno López.
Buen trabajo!!
Muchas gracias Rubén!
Podría agregarle a mi proyecto seria genial,Gracias muy Interesante.
Genial, me alegro!
Muy buen proyecto Rafael!
Muchas gracias por compartirlo
Muchas gracias Alex, a tí!
Muy buena explicación
Hi there,
this is a very good blog I appreciate your work. thanks for sharing such a useful information.
rcg999 เว็บไซต์สล็อต สล็อตออนไลน์ยอดฮิต เว็บไซต์สล็อตเว็บไซต์ตรง pg slot เป็นสล็อตออนไลน์ที่มีผู้เล่นมากมายก่ายกองทั้งยังผู้เล่นเก่าและก็ผู้เล่นที่พึ่งพิงเข้าแวดวงเว็บไซต์
Hey there! I’ve been reading your site for some time
now and finally got the courage to go ahead and give you a shout out from Lubbock Tx!
Just wanted to tell you keep up the great work!
I have tried to reach the clinic to get a receipt for insurance purposes and have not heard back 11 days later generic cytotec for sale
buy lasix online no prescription Thiazides need to be excreted into the tubular lumen to exert their effect
You’ll Never Guess This Kayleigh Wanless Porn Star’s Secrets kayleigh wanless
porn star (Ghstream.Com)
гарантия при продаже аккаунтов магазин аккаунтов социальных сетей
маркетплейс аккаунтов магазин аккаунтов
Guaranteed Accounts Accounts for Sale
Account Buying Platform Account Buying Service
Verified Accounts for Sale Secure Account Purchasing Platform
Account exchange Buy Account
Accounts market Account Trading
account trading platform account marketplace
social media account marketplace buy pre-made account
account trading platform buy pre-made account
buy pre-made account purchase ready-made accounts
sell accounts buy accounts
accounts for sale find accounts for sale
account marketplace buy accounts
account market online account store
account buying service https://accounts-for-sale.org/
account sale account trading service
account trading platform account trading platform
account trading service secure account purchasing platform
accounts marketplace sell accounts
online account store account market
account trading sell accounts
find accounts for sale https://accounts-marketplace.xyz/
website for selling accounts accounts market
guaranteed accounts account marketplace
social media account marketplace https://buy-accounts-shop.pro/
account purchase buy-accounts.live
account exchange https://social-accounts-marketplace.live/
биржа аккаунтов https://akkaunt-magazin.online/
маркетплейс аккаунтов https://akkaunty-market.live
facebook ads accounts https://buy-adsaccounts.work/
buy facebook ads accounts https://buy-ads-account.click
buy facebook ad accounts https://ad-account-buy.top
buy facebook ad accounts buy aged facebook ads account
facebook account sale https://ad-account-for-sale.top/
google ads account buy sell google ads account
buy verified google ads accounts https://buy-ads-accounts.click
buy fb ads account https://buy-accounts.click
buy google ads verified account google ads accounts for sale
google ads reseller https://buy-ads-invoice-account.top
buy google ads verified account buy google ads accounts
buy google agency account https://buy-verified-ads-account.work
verified business manager for sale buy facebook business manager account
buy facebook verified business account https://buy-business-manager-acc.org
buy facebook bm https://business-manager-for-sale.org
buy business manager https://buy-business-manager-accounts.org/
buy tiktok ads account https://tiktok-ads-account-buy.org
tiktok ads account for sale https://tiktok-ads-account-for-sale.org
buy tiktok ads accounts https://tiktok-agency-account-for-sale.org
buy tiktok ad account https://buy-tiktok-ads.org
температура воды в хургаде в апреле
легальна онлайн робота для дівчат Стань вебкам моделью в польской студии, работающей в Варшаве! Открыты вакансии для девушек в Польше, особенно для тех, кто говорит по-русски. Ищешь способ заработать онлайн в Польше? Предлагаем подработку для девушек в Варшаве с возможностью работы в интернете, даже с проживанием. Рассматриваешь удаленную работу в Польше? Узнай, как стать вебкам моделью и сколько можно заработать. Работа для украинок в Варшаве и высокооплачиваемые возможности для девушек в Польше ждут тебя. Мы предлагаем легальную вебкам работу в Польше, онлайн работа без необходимости знания польского языка. Приглашаем девушек без опыта в Варшаве в нашу вебкам студию с обучением. Возможность заработка в интернете без вложений. Работа моделью онлайн в Польше — это шанс для тебя! Ищешь “praca dla dziewczyn online”, “praca webcam Polska”, “praca modelka online” или “zarabianie przez internet dla kobiet”? Наше “agencja webcam Warszawa” и “webcam studio Polska” предлагают “praca dla mlodych kobiet Warszawa” и “legalna praca online Polska”. Смотри “oferty pracy dla Ukrainek w Polsce” и “praca z domu dla dziewczyn”.
Large selection allows you to select an acceptable
course for every person regardless of gender. Our store steroids
UK cares about its customers, their privacy, and therefore
relies on the non-public service that every buyer feel particular and unique.
Enter authorized steroids — natural supplements designed to imitate the muscle-building and fat-burning results of anabolic steroids with out the dangerous side effects or legal penalties.
If you are contemplating muscle-building supplements, it’s essential
to understand the stark distinction between authorized steroids and anabolic steroids.
Regardless Of having related objectives — increased muscle mass, power, and efficiency — the
2 merchandise are vastly different in terms of safety, legality, and long-term effects.
This is due to the injection enabling Dianabol to enter the bloodstream immediately as an alternative of getting to
bypass the liver. Salicylic acid is another frequent pimples
remedy; nevertheless, this is less efficient in comparison to retinoids.
Topical antibiotics are additionally an advantageous remedy for acne, decreasing inflamed lesions by
46-70% (27). To avoid such resistance, antibiotics ought to contain benzoyl peroxide, which will further
cut back irritation. Some studies have shown milk thistle to
be efficient at lowering irritation and reducing liver enzymes, especially in these suffering from acute
hepatitis. To fight hepatotoxicity, our patients frequently take liver support supplements, corresponding to milk thistle (Silybum marianum).
Again the FDA would pressure Ciba for extra data, however in 1983 beneath mounting pressure
Ciba would discontinue the Dianabol tab.
A few years later, the FDA would pull all Methandrostenolone manufacturers from the shelf.
Since that point Dianabol has not been legally manufactured in the Usa, however is still manufactured heavily all over the world.
With Out this C17-aa component, customers wouldn’t be ready to experience optimum
results from Dianabol. Tamoxifen (Nolvadex) seems to be the most effective drug, according to research (12)
and our expertise. Nonetheless, anti-estrogens are usually considered
a gentle therapy for gynecomastia. According to 2018 statistics,
the common value of gynecomastia surgery is $3,824 (13).
We have discovered that bodybuilders on Dianabol can experience an increase in vascularity.
This is when the veins turn out to be more visible,
often seen spiraling by way of a person’s muscle tissue, resembling a human roadmap.
However, it might be Dianabol that might bring forth
the modern age of efficiency enhancement and the conclusion of what anabolic steroid growth hormone use could
do in a efficiency capability. Oddly sufficient, for decades people who have supported
steroid bans have touted there’s no proof
Dianabol truly enhances efficiency. Anybody who
has used the steroid is aware of how ridiculous that is,
and if it weren’t it wouldn’t be one of the most wanted anabolic steroids
on the earth for more than 50 years.
Whereas Trenbolone is a managed substance and requires
a prescription in lots of countries, it’s obtainable through certain channels.
Analysis suggests that while accessibility might enhance
through telemedicine improvements, price reductions are less
sure. Predictive fashions present a possible rise in prescription prices by up to 10% by 2025.
This enhance may be offset by improved insurance coverage, yet disparities in accessibility might persist throughout
totally different regions and demographics.
The only downside that we see with Winstrol, in regard to body composition, is that it could possibly sometimes
deflate the muscular tissues because of its reducing glycogen levels.
This can be attributed to its diuretic properties, caused by a
lack of aromatase enzyme, resulting in much less intracellular fluid.
So, for optimum results on Dianabol, customers generally undertake a calorie
surplus diet, known as a bulking part. We have seen customers abstain from lifting weights and nonetheless
see noticeable improvements in physique composition (being sedentary) from Dianabol use.
Thus, if a Dianabol product just isn’t working, it’s likely the particular person has been scammed.
The finest method to examine its authenticity is
by buying a testing kit, which confirms whether the Dianabol is actual or fake.
A strong post-cycle remedy protocol, as outlined within the PCT section, will help reduce your catabolic state post-cycle and assist
retain extra of your gains. This means some dealers are promoting
placebos but labeling it as real Dianabol.
In this article, we’ll delve into the scientific aspects and make clear its mode of action. Anavar
belongs to the class of anabolic steroids, specifically synthetic derivatives of dihydrotestosterone (DHT).
Its molecular construction has been altered to enhance its anabolic properties whereas decreasing its androgenic effects.
As a end result, Oxandrolone displays a lower potential
for androgenic unwanted side effects compared to different steroids.
Whereas fluctuations in uncooked material prices can significantly influence the pricing of anabolic steroids, current tendencies recommend a posh interplay of factors that want cautious examination.
Key uncooked supplies like plant-based sterols
and chemical reagents are subject to market volatility because
of geopolitical tensions and environmental rules.
Knowledge indicates a possible improve in uncooked material prices by 5-10% annually, impacting steroid prices.
As technological advances continue to reshape the panorama of anabolic steroid production, the development of cost-effective artificial
pathways stands at the forefront of these improvements.
красное море температура воды
kitesurfing
Hi to all, the contents present at this web page are actually awesome for people experience, well, keep up the good work fellows.
abu dhabi bus card recharge
car transport rates Dealership Car Delivery and Dealer Transport Services Dealerships rely heavily on efficient and reliable car transport services. Dealership car delivery is a specialized service that ensures vehicles reach customers promptly and in pristine condition. Dealer transport services facilitate the movement of vehicles between dealerships, auctions, and storage facilities. Home delivery car dealerships are gaining popularity, offering customers the convenience of having their new or used car delivered directly to their doorstep.
металлопрокат купить в москве цена Цветной металлопрокат в Москве: купить для специальных задач Цветной металлопрокат (алюминий, медь, бронза и др.) используется в тех случаях, когда требуются особые свойства материала: высокая электропроводность, устойчивость к коррозии, малый вес. В Москве можно найти широкий ассортимент цветного металлопроката для различных отраслей промышленности.
Владимир Чернышев
Бани из клееного бруса под ключа Строительство дома, бани из клееного бруса: Мы используем только высококачественные материалы и современное оборудование. Наши специалисты – это команда профессионалов с многолетним опытом работы. Мы гарантируем индивидуальный подход к каждому клиенту и высокое качество строительства. Позвольте нам воплотить вашу мечту о загородной жизни в реальность!
https://plombi.ru/product/40-signal/
Pharmaceuticals Bazaar Drugs Marketplace: A New Darknet Platform with Dual Access Bazaar Drugs Marketplace is a new darknet marketplace rapidly gaining popularity among users interested in purchasing pharmaceuticals. Trading is conducted via the Tor Network, ensuring a high level of privacy and data protection. However, what sets this platform apart is its dual access: it is available both through an onion domain and a standard clearnet website, making it more convenient and visible compared to competitors. The marketplace offers a wide range of pharmaceuticals, including amphetamines, ketamine, cannabis, as well as prescription drugs such as alprazolam and diazepam. This variety appeals to both beginners and experienced buyers. All transactions on the platform are carried out using cryptocurrency payments, ensuring anonymity and security. In summary, Bazaar represents a modern darknet marketplace that combines convenience, a broad product selection, and a high level of privacy, making it a notable player in the darknet economy.
Группа в Telegram Доска бесплатных объявлений “Все для Вас Архангельск”: товары, услуги, авто, жильё, работа, розыгрыши, отзывы и многое другое. Архангельск, Северодвинск, Новодвинск, Катунино, Березник, Рикасиха, Холмогоры, Мезень, Карпогоры архангельск
обучение кайтсёрфингу Kitesurfing это спорт, доступный всем, кто хочет испытать адреналин и насладиться красотой моря.
инфографика для маркетплейсов заказать
Кайт сафари
замена тэна стиральной машины алматы Ремонт платы стиральной машины в Алматы – это работа для профессионалов, которые знают все тонкости электроники.
бесплатная диагностика стиральной машины алматы Диагностика стиральной машины Алматы. Определение причины поломки, точная смета на ремонт.
прием металлолома Ауэзовский район Прием железа в Алматы: оперативный вывоз, честная оценка, быстрая оплата.
Бездепозитные бонусы в казино
компрессор отбойные молотки Демонтаж касс магазина – профессиональные услуги.
vavada casino отзывы Вавада Казино Официальный Сайт: Откройте для себя мир азарта и развлечений на официальном сайте Вавада Казино, где вас ждут захватывающие игры и щедрые бонусы.
экстренно разнорабочие алматы Заказать разнорабочих в Алматы удобно через онлайн-платформы или агентства. Это позволяет быстро найти и нанять подходящих специалистов для выполнения необходимых работ.
70918248
References:
big bonus virtual casinos (Smpnsatapptgmanggis.sch.id)
эвакуатор эксклюзивное авто Эвакуатор 4×4 Алматы – занимается эвакуацией полноприводных автомобилей.
Бездепозитные бонусы
Бездепозитный бонус в казино
Sykaaa casino скачать бесплатно на телефон Сукааа казино официальный сайт предлагает широкий выбор игр и привлекательные бонусы.
Бездепозитный бонус
вавада казино официальный сайт рабочее Вавада Казино Официальный Рабочее Зеркало на Сегодняшний День: Всегда имейте доступ к Вавада Казино через рабочее зеркало, актуальное на сегодняшний день, и не упустите возможность испытать удачу.
блокчейн расследования
Бездепозитные бонусы в казино
Sykaaa casino бонусы Sykaaa casino отзывы помогут составить объективное мнение о казино. Узнайте, что говорят другие игроки о своем опыте.
вавада казино официальный сайт Вабанк Казино Официальный Сайт: Посетите официальный сайт Вабанк Казино и окунитесь в мир азартных игр с широким выбором развлечений и возможностью крупных выигрышей.
Бездепозитные бонусы в казино Бездепозитные бонусы в казино: Что это такое? Бездепозитный бонус в казино – это денежная сумма или бесплатные вращения, которые казино предоставляет новым игрокам в качестве приветственного подарка. Главное преимущество этого бонуса заключается в том, что для его получения не требуется внесение депозита. Игрок может просто зарегистрироваться на сайте казино и получить бонус на свой счет.
Бездепозитные бонусы в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Бездепозитный бонус
Бездепозитные бонусы Бездепозитный бонус в казино: Как его получить? Получить бездепозитный бонус в казино, как правило, довольно просто. Обычно требуется пройти процедуру регистрации на сайте казино и подтвердить свою учетную запись. В некоторых случаях может потребоваться ввести специальный промокод. После выполнения всех условий бонус будет автоматически зачислен на ваш счет. Бездепозитные бонусы – это отличная возможность начать свой путь в мире онлайн-казино с минимальным риском и максимальным удовольствием. Однако, прежде чем принимать бонус, всегда внимательно ознакомьтесь с условиями его использования, чтобы избежать недоразумений в будущем.
вавада Вавада Казино Официальный Сайт Вход Бесплатный Играть: Начните играть в Вавада Казино бесплатно, получив доступ к демо-версиям игр и оценив все преимущества этого онлайн-казино.
Бездепозитный бонус в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Бездепозитный бонус в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Бездепозитный бонус
Бездепозитный бонус в казино Бездепозитные бонусы: Путь к азартным приключениям без риска В мире онлайн-казино, где азарт и возможность выигрыша переплетаются в захватывающем танце, бездепозитные бонусы занимают особое место. Эти щедрые предложения служат своеобразным ключом, открывающим двери в мир азартных развлечений без необходимости вкладывать собственные средства.
Sykaaa casino приложениевавада казино Sykaaa casino официальный сайт бонус за регистрацию – отличный старт для новых игроков. Получите дополнительные средства для игры сразу после регистрации.
Бездепозитные бонусы в казино Бездепозитный бонус: Испытайте удачу без потерь Бездепозитный бонус позволяет игрокам протестировать различные игры, оценить функциональность казино и испытать свою удачу, не рискуя собственными деньгами. Это отличная возможность познакомиться с миром онлайн-казино и понять, насколько он соответствует вашим предпочтениям.
Игорь Стоунберг отзывы Я очень благодарна Игорю за помощь. Он помогает людям в трудных ситуациях. | Рада, что обратилась. |
Бездепозитный бонус в казино
1000 рублей за регистрацию вывод сразу без вложений в казино
Telegram стикеры NFT Airdrop криптовалюты – бесплатная раздача токенов для привлечения новых пользователей.
Игорь Стоунберг экстрасенс Игорь Стоунберг – не просто экстрасенс, а настоящий целитель душ.
Бездепозитные бонусы
1000 рублей за регистрацию вывод сразу без вложений
Бездепозитные бонусы
1000 рублей за регистрацию
hleb na zakvaske Домашний хлеб Ташкент – это тепло и уют, которые мы передаем в каждом кусочке. Наш хлеб приготовлен по традиционным рецептам, с использованием только натуральных ингредиентов.
Работа для школьников во Владивостоке Подработка во Владивостоке для студентов: совмещение учебы и заработка Студенты Владивостока могут найти множество вариантов подработки, позволяющих совмещать учебу и работу. Гибкий график и неполная занятость делают подработку идеальным способом заработать деньги и получить ценный опыт. Популярные варианты включают работу в сфере обслуживания, курьерскую доставку и помощь в проведении мероприятий.
Бездепозитный бонус в казино
1000 рублей за регистрацию вывод сразу без вложений в казино адмирал
Бездепозитные бонусы в казино
1000 рублей за регистрацию вывод сразу
Бездепозитные бонусы в казино
кайтсёрфинг в хургаде Кайтсерфинг в хургаде: Почувствуйте адреналин и свободу, скользя по волнам в Хургаде.
I got this site from my buddy who told me on the topic of this site and now this time I am visiting this web site and reading very informative content at this time.
Try 88fb login and enjoy fast gaming with rewards
кайт сафари в хургаде Кайт споты египта: Откройте для себя разнообразие кайт-спотов Египта, от лагун с мелкой водой до открытого моря с большими волнами. Каждый найдет здесь место по душе.
Бездепозитный бонус в казино
1000 рублей за регистрацию в казино без депозита
кайт споты египта : Кайт школа унесенные ветром: Почувствуй себя свободным вместе с нами!
кайт школа в хургаде : Обучение кайтингу: Думаете, это сложно? Ерунда! Наши инструкторы превратят вас в профи за пару дней! Мы научим вас не только стоять на доске, но и понимать ветер, чувствовать волну и получать максимум удовольствия от катания!
кайт школа унесенные ветром : Кайт школы санкт петербург: Обучение кайтсерфингу в любое время года!
Бездепозитные бонусы в казино
1000 рублей за регистрацию вывод сразу без вложений в казино адмирал
кайт : Кайт школа спб: Сделай свой первый шаг в мир кайтсерфинга!
оранжевый остров в хургаде есть там акулы : Кайт школа в хургаде: Твой билет в мир кайтсерфинга!
Бездепозитный бонус
можно мнстным довить акул в хургаде Кайт дети ветра: Откройте для себя мир, где ветер – ваш лучший друг, а волны – танцплощадка. Почувствуйте прилив адреналина и единение с природой, обучившись кайтсерфингу у профессионалов.
1000 рублей за регистрацию в казино без депозита
египет русская кайт школа : Кайт школа унесенные ветром: Почувствуй свободу и адреналин!
кайт сафари Кайт школа веселовка: Кайт школа на популярном споте Веселовка
1000 рублей за регистрацию вывод сразу
iko что означает Кайтсерфинг хургада: Лучшие кайт-споты Хургады ждут вас!
кайтсерфинг сертификат iko : detivetra
https://kitehurghada.ru Обучение кайтсёрфингу: Профессиональные инструкторы и безопасное обучение для всех уровней.
Simply desire to say your article is as astounding. The clearness to your put up is just great and that i could assume you are an expert on this subject. Well together with your permission let me to grab your feed to keep up to date with forthcoming post. Thanks one million and please continue the enjoyable work.
Child Porn
Бездепозитный бонус
игровые автоматы бонус 1000 рублей за регистрацию без депозита
кайтсерфинг сертификат iko Кайт сафари египет: Исследуйте самые живописные уголки Египта на кайт сафари. Почувствуйте себя частью природы и насладитесь адреналином.
перевозка пианино газель алматы Грузоперевозки в Алматы – это качественный и оперативный сервис, который предлагает широкий выбор автомобилей, в том числе и газелей, для решения различных задач. Если вам необходимо перевезти мебель, бытовую технику или строительные материалы, наши услуги газели в Алматы помогут вам осуществить это быстро и надежно. Мы предлагаем аренду газелей различной грузоподъемности, включая короткие и длинные модели, а также специальное оборудование, например, термобудки и рефрижераторы для транспортировки чувствительных грузов. Вы можете заказать газель с грузчиками для удобного переезда, будь то офисный или квартирный. Наша команда профессиональных грузчиков обеспечит аккуратную упаковку, разборку и сборку мебели, а также позаботится о безопасной перевозке ваших вещей. В Алматы мы работаем круглосуточно, предоставляя возможность вызвать газель в любое время суток. Цены на грузоперевозки в Алматыvarьируются в зависимости от расстояния и объема работ, но мы всегда готовы предложить конкурентные расценки и специальные скидки для постоянных клиентов. Для срочных заказов мы предоставляем услуги быстрого реагирования, чтобы вы не переживали о задержках. Не упустите возможность воспользоваться самым удобным и экономичным способом перевозки в Алматы. Свяжитесь с нами по телефону или через WhatsApp, чтобы обсудить детали вашего заказа. Обращайтесь за надежной газелью в Алматы и убедитесь сами в качестве наших услуг!
Кино 2025 бесплатно Телеграм канал с фильмами: Подпишитесь и будьте в курсе новинок.
Zara kids Zara – это всемирно известный бренд, завоевавший популярность благодаря своему актуальному дизайну, высокому качеству и доступным ценам. Zara предлагает широкий выбор одежды для всей семьи, включая детскую линию Zara Kids. Садовод Поставщик
Здоровье подводного человека Запуск маркерного буя – это навык, позволяющий дайверу обозначить свое местоположение на поверхности воды. Виды маркерных буев дайвера
рулонные шторы на пластиковые окна Штора для ванны – это важный элемент интерьера ванной комнаты, который должен быть не только функциональным, но и красивым. Шторы ночь
Канал про дайвинг Погружения в сухом костюме – это возможность заниматься дайвингом в холодной воде, сохраняя тепло и комфорт. Сухарь для дайвера
Пробное погружение с аквалангом Существует множество видов акул, отличающихся по размеру, форме и образу жизни. Нападение акулы на человека
buy facebook ads account marketplace for ready-made accounts secure account sales
buy fb account marketplace for ready-made accounts account trading
Не каждый день находишь площадку, где хочется задержаться подольше. официальный сайт Vodka Casino приятно удивил. Бонусы не просто на словах — они реально работают. Игры продуманы до деталей. Можно играть хоть с утра до ночи. Такие впечатления редко где получишь.
888starz казино с выводом https://fizmatschool2.ru/wp-content/articles/?skachat_671.html
BrunoCasino klantenservice https://forum.onetime.nl/topic/23837-brunocasinoone/
888 starz http://1by.by/stat/stoit-li-igrat-s-telefona-preimushhestva-i-nedostatki.html
can you drink creatine while fasting
References:
neurotrauma
Chicken Road slothttps://apkpure.com/p/app.chickenroad.game
888starz download on iPhone for free https://www.pgyer.com/apk/apk/app.starz.online
download 888starz https://www.pgyer.com/apk/en/apk/app.starz.online
888starz bet telechargement gratuit https://www.pgyer.com/apk/fr/apk/app.starz.online
chicken road https://www.pgyer.com/apk/apk/app.chickenroad.game
rooster bet https://www.pgyer.com/apk/apk/rooster.bet.app
NeoSpin Casino app download https://www.pgyer.com/apk/apk/neospin.casino.slots
скачать 888 starz на андроид бесплатно https://centralpaulista.com.br/sem-categoria/888starz-bukmekerskaya-kontora-stavki-na-aviasport/
888starz скачать на айфон бесплатно https://beta.sovvy.com/888starz-veb-zhurnal-dlya-stavok-bezo-blokirovok-a-takzhe-limitov/
888 starz скачать бесплатно https://activeseries.academy/dolzhnostnoy-zhurnal-888stars/
888starz букмекерская контора https://flaviazabalarealstate.com/888starz-dolzhnostnoy-veb-zhurnal-bukmekerskoy-kontory-a-takzhe-kazino/
Hello there, You have done a fantastic job. I will certainly digg it and personally recommend to my friends. I’m confident they will be benefited from this web site.
https://excl.com.ua/iak-uniknuty-polomky-far-zavdiaky-pravylnym-instrumentam.html
Ce site a ete concu pour fournir des informations essentielles.
Parmi ses principales fonctionnalites, Vous y trouverezdes rubriques variees, incluant des contenus surles projets en cours.
La simplicite et l’ergonomie sont au c?ur de la realisation, afin de garantirune utilisation fluide et efficace.
Les informations disponibles sont adaptees aux changements municipaux, afin de vous offrir une plateforme veritablement vivante et dynamique.
https://www.postman.com/brendon-s-postman
Dans un monde ou l’acces aux savoirs oublies reste limite, cette initiative propose une alternative essentielle en reinventant les formats de creation et de partage. Cette ressource unique se consacre a la transformation des savoirs.)
A travers un prisme interdisciplinaire croisant art, science et engagement, ce projet vous offre une analyse approfondie sur ces questions complexes.
Les formats proposes melent des contenus ecrits, des echanges en milieu universitaire et des projets participatifs et permettent d’embrasser des sujets souvent laisses dans l’ombre
Les mises a jour frequentes garantissent des apports toujours renouveles, refletant les enjeux culturels et sociaux qui traversent nos societes.
http://lacambre.be/en/news/julien-ribeiro
I get pleasure from, lead to I found just what I was taking a look for. You’ve ended my four day lengthy hunt! God Bless you man. Have a great day. Bye
live gay porn
Excellent post but I was wanting to know if you could write a litte more on this topic? I’d be very thankful if you could elaborate a little bit further. Many thanks!
viagra preis
Nase webova platforma poskytuje uceleny pohled na deni kolem veslovani mladych.
Zde naleznete prehledne informace o ucastnicich, vcetne zakulisnich zajimavosti.
Web je navrzen tak, aby byl uzivatelsky prehledny, srozumitelny pro siroke publikum, at uz se zajimate o veslovani.
Diky pravidelnym aktualizacim mate neustale pristup k cerstvym informacim, zahrnujic novinky od organizatoru.
https://nlroei.nl/hugo-slangen-verovert-brons-bij-coupe/
Ce portail propose une immersion dans le travail d’un ensemble base a Nantes. Son contenu explore des manifestations culturelles authentiques. La navigation a ete pensee pour etre intuitive et fluide. De nouveaux contenus sont mis a jour pour vous offrir une experience actuelle. https://www.radiofrance.fr/francemusique/podcasts/le-concert-de-20h/au-coeur-de-la-pulsation-avec-les-musiciens-de-l-orchestre-de-paris-de-l-eic-et-des-arts-florissants-8118043
Decouvrez une approche innovante pour transformer vos evenements, mettant en avant des conceptions uniques. Il permet de donner vie a vos projets, avec une attention particuliere a chaque element. ainsi que l’usage de materiaux de qualite. Les concepts et scenographies y sont crees avec soin, afin de rendre chaque evenement veritablement exceptionnel. https://www.bitchute.com/channel/decorationmariagesfr
Saviez-vous qu’il existe un centre entierement dedie au soin, au toilettage et au confort de vos animaux de compagnie?
Ce service est axe sur l’idee dele respect des besoins specifiques de chaque animal, pour garantir un moment agreable aussi bien pour l’animal que pour vous.
Si votre objectif est de offrir le meilleur a votre fidele ami, vous trouverez ici un accompagnement sur mesure et professionnel.
Mettant a jour ses pratiques et ses propositions, ce service reste au fait des dernieres tendances et besoins.
https://leetcode.com/u/euretoilettage/
комедії дивитись онлайн сучасне українське кіно онлайн
Тяговые аккумуляторные https://ab-resurs.ru батареи для складской техники: погрузчики, ричтраки, электротележки, штабелеры. Новые АКБ с гарантией, помощь в подборе, совместимость с популярными моделями, доставка и сервисное сопровождение.
Продажа тяговых АКБ https://faamru.com для складской техники любого типа: вилочные погрузчики, ричтраки, электрические тележки и штабелеры. Качественные аккумуляторные батареи, долгий срок службы, гарантия и профессиональный подбор.
Лучший маркетплейс купить аккаунты Instagram приветствует вас в нашем разделе расходников. Если вам нужно купить Facebook-аккаунты, чаще всего важен не «одном логине», а в управляемости: предсказуемая операционка, разделение задач между участниками и аккуратные изменения. Мы оформили короткую карту выбора, чтобы вы без лишних вопросов понимали что сравнивать перед заказом.Что внутри: типы сущностей и сценарии. Важно: покупка — стартовая точка. Дальше решает порядок: кто имеет доступ, как вы ведете кампании последовательно, как фиксируете изменения и как отделяете тесты от масштабирования. Ключевое преимущество данной площадки — заключается в наличие масштабной базы знаний, где выложены актуальные гайды по операционке. Мы подскажем, как без лишних рисков разделить роли, чтобы вы старт был предсказуемым и соблюдались правила . Оформляя здесь, вы получаете не только состав, а также полную консультацию, прозрачные правила, гарантию на валид и самые приятные цены на рынке. Дисклеймер: используйте активы законно и всегда в соответствии с правилами платформ.
Uitbetalen bij crystal roll casino contact met priority support voor withdrawal requests binnen 30 minuten.
Мультимедийный интегратор айтек интеграция мультимедийных систем под ключ для офисов и объектов. Проектирование, поставка, монтаж и настройка аудио-видео, видеостен, LED, переговорных и конференц-залов. Гарантия и сервис.
Online bij crystal online casino met mobile-first design en 1.2-second load times.
Site web 1xbet pour Android 1xbet apk
Looking for a casino? 8mbets Slots, table games, and live casino all in one place. Quick login, convenient registration, modern providers, stable payouts, and comfortable player conditions.
Playing at the casino? jwin 7 Play online for real money. We offer a wide selection of slots, live dealers, fast payments, easy login, and exciting offers for new and returning players.
Продажа IQOS ILUMA https://ekb-terea.org и стиков TEREA в СПб. Только оригинальные устройства и стики, широкий ассортимент, оперативная доставка, самовывоз и поддержка клиентов на всех этапах покупки.
Купить IQOS ILUMA https://spb-terea.store и стики TEREA в Санкт-Петербурге с гарантией оригинальности. В наличии все модели ILUMA, широкий выбор вкусов TEREA, быстрая доставка по СПб, удобная оплата и консультации специалистов.
IQOS ILUMA https://terea-iluma24.org и стики TEREA — покупка в Москве без риска. Гарантия подлинности, большой выбор, выгодные условия, доставка по городу и помощь в подборе устройства и стиков.
сервисы онлайн рассылок сервис по рассылкам писем
the best adult generator https://pornjourney.app/ai-porn-chat/ create erotic videos, images, and virtual characters. flexible settings, high quality, instant results, and easy operation right in your browser. the best features for porn generation.
сервис рассылок российские сервисы для рассылки email
Жіночий портал https://soloha.in.ua про красу, здоров’я, стосунки та саморозвиток. Корисні поради, що надихають історії, мода, стиль життя, психологія та кар’єра – все для гармонії, впевненості та комфорту щодня.
Портал для жінок https://u-kumy.com про стиль, здоров’я та саморозвиток. Експертні поради, чесні огляди, лайфхаки для дому та роботи, ідеї для відпочинку та гармонійного життя.
Galatasaray Football Club https://galatasaray.com.az/ latest news, fixtures, results, squad and player statistics. Club history, achievements, transfers and relevant information for fans.
Barcelona fan site barcelona.com.az/ with the latest news, match results, squads and statistics. Club history, trophies, transfers and resources for loyal fans of Catalan football.
UFC Baku fan site ufc-baku.com.az/ for fans of mixed martial arts. Tournament news, fighters, fight results, event announcements, analysis and everything related to the development of UFC in Baku and Azerbaijan.
Rafa Silva rafa silva is an attacking midfielder known for his dribbling, mobility, and ability to create chances. Learn more about his biography, club career, achievements, playing style, and key stats.
Сайт города Одесса https://faine-misto.od.ua свежие новости, городские события, происшествия, культура, экономика и общественная жизнь. Актуальные обзоры, важная информация для жителей и гостей Одессы в удобном формате.
Сайт города Винница https://faine-misto.vinnica.ua свежие новости, городские события, происшествия, экономика, культура и общественная жизнь. Актуальные обзоры, важная информация для жителей и гостей города.
Новости Житомира https://faine-misto.zt.ua сегодня: события города, инфраструктура, транспорт, культура и социальная сфера. Обзоры, аналитика и оперативные обновления о жизни Житомира онлайн.
Портал города Хмельницкий https://faine-misto.km.ua с новостями, событиями и обзорами. Всё о жизни города: решения местных властей, происшествия, экономика, культура и развитие региона.
Новости Львова https://faine-misto.lviv.ua сегодня: городские события, инфраструктура, транспорт, культура и социальная повестка. Обзоры, аналитика и оперативные обновления о жизни города онлайн.
Днепр онлайн https://faine-misto.dp.ua городской портал с актуальными новостями и событиями. Главные темы дня, общественная жизнь, городские изменения и полезная информация для горожан.
Автомобильный портал https://avtogid.in.ua с актуальной информацией об автомобилях. Новинки рынка, обзоры, тест-драйвы, характеристики, цены и практические рекомендации для ежедневного использования авто.
Новости Киева https://infosite.kyiv.ua события города, происшествия, экономика и общество. Актуальные обзоры, аналитика и оперативные материалы о том, что происходит в столице Украины сегодня.
познавательный блог https://zefirka.net.ua с интересными статьями о приметах, значении имен, толковании снов, традициях, праздниках, советах на каждый день.
Объясняем сложные https://notatky.net.ua темы просто и понятно. Коротко, наглядно и по делу. Материалы для тех, кто хочет быстро разобраться в вопросах без профессионального жаргона и сложных определений.
Полтава онлайн https://u-misti.poltava.ua городской портал с актуальными новостями и событиями. Главные темы дня, общественная жизнь, городские изменения и полезная информация для горожан.
Портал города https://u-misti.odesa.ua Одесса с новостями, событиями и обзорами. Всё о жизни города: решения властей, происшествия, экономика, спорт, культура и развитие региона.
Новости Житомира https://u-misti.zhitomir.ua сегодня: городские события, инфраструктура, транспорт, культура и социальная сфера. Оперативные обновления, обзоры и важная информация о жизни Житомира онлайн.
telecharger le site web melbet melbet apk
Новости Хмельницкого https://u-misti.khmelnytskyi.ua сегодня на одном портале. Главные события города, решения властей, происшествия, социальная повестка и городская хроника. Быстро, понятно и по делу.
Львов онлайн https://u-misti.lviv.ua последние новости и городская хроника. Важные события, заявления официальных лиц, общественные темы и изменения в жизни одного из крупнейших городов Украины.
Новости Киева https://u-misti.kyiv.ua сегодня — актуальные события столицы, происшествия, политика, экономика и общественная жизнь. Оперативные обновления, важные решения властей и ключевые темы дня для жителей и гостей города.
Актуальные новости https://u-misti.chernivtsi.ua Черновцов на сегодня. Экономика, происшествия, культура, инфраструктура и социальные вопросы. Надёжные источники, регулярные обновления и важная информация для жителей города.
Новости Днепра https://u-misti.dp.ua сегодня — актуальные события города, происшествия, экономика, политика и общественная жизнь. Оперативные обновления, важные решения властей и главные темы дня для жителей и гостей города.
connexion au site web 1win 1win apk
Городской портал https://u-misti.cherkasy.ua Черкасс — свежие новости, события, происшествия, экономика и общественная жизнь. Актуальные обзоры, городская хроника и полезная информация для жителей и гостей города.
pinco casino скачать клиент https://pinco-install-casino.ru
Поставляем грунт https://organicgrunt.ru торф и чернозем с доставкой по Москве и Московской области. Подходит для посадок, благоустройства и озеленения. Качественные смеси, оперативная логистика и удобные условия для частных и коммерческих клиентов.
joycasino казино казино джой
Op zoek naar een casino? WinItt Casino biedt online gokkasten en live games. Het biedt snel inloggen, eenvoudige navigatie, moderne speloplossingen en stabiele prestaties op zowel computers als mobiele apparaten.
продажа 1 квартиры сочи жк светский лес
Изделия из пластмасс https://ftk-plastik.ru собственного производства. Продажа оптом и в розницу, широкий ассортимент, надёжные материалы и стабильные сроки. Выполняем заказы любой сложности по техническому заданию клиента.
Жалюзи от производителя https://balkon-pavilion.ru изготовление, продажа и профессиональная установка. Большой выбор дизайнов, точные размеры, надёжная фурнитура и комфортный сервис для квартир и офисов.
Производим пластиковые https://zavod-dimax.ru окна и выполняем профессиональную установку. Качественные материалы, точные размеры, быстрый монтаж и гарантийное обслуживание для комфорта и уюта в помещении.
Производство оборудования https://repaircom.ru с предварительной разработкой и адаптацией под требования клиента. Качественные материалы, точные расчёты, соблюдение сроков и техническая поддержка.
Szukasz kasyna? kasyno online w Polsce: wybor najlepszych stron do gry. Licencjonowane platformy, popularne sloty i kasyna na zywo, wygodne metody platnosci, uczciwe warunki i aktualne oferty.
Торговая мебель https://woodmarket-for-business.ru от производителя для бизнеса. Витрины, стеллажи, островные конструкции и кассовые модули. Индивидуальный подход, надёжные материалы и практичные решения для продаж.
Производим торговую мебель https://woodmarket-for-business.ru для розничного бизнеса и сетевых магазинов. Функциональные конструкции, современный дизайн, точные размеры и полный цикл работ — от проекта до готового решения.
Оборудование для отопления https://thermostock.ru и водоснабжения: котлы, циркуляционные насосы, радиаторы, мембранные баки и комплектующие от ведущих производителей. Что вы получаете: сертифицированные товары, прозрачные цены, оперативную обработку заказа. Создайте комфортный микроклимат в доме — выбирайте профессионалов!
Нужен памятник? памятник уфа — гранитные и мраморные изделия. Индивидуальные проекты, точная обработка камня, оформление и монтаж. Надёжное качество и внимательное отношение к деталям.
Нужен памятник? памятник уфа — гранитные и мраморные изделия. Индивидуальные проекты, точная обработка камня, оформление и монтаж. Надёжное качество и внимательное отношение к деталям.
Нужно авто? привезти автомобиль из китая в россию поиск, проверка, оформление и доставка авто из разных стран. Прозрачные условия, помощь на всех этапах и сопровождение сделки до получения автомобиля.
дизайн студия 17 комплектация объекта
Нужен памятник? заказать памятник в уфе — гранитные и мраморные изделия. Индивидуальные проекты, точная обработка камня, оформление и монтаж. Надёжное качество и внимательное отношение к деталям.
Только что опубликовано: https://dzen.ru/a/aVF1vtLHgkQMThpP
Нужен проектор? интернет-магазин проекторов большой выбор моделей для дома, офиса и бизнеса. Проекторы для кино, презентаций и обучения, официальная гарантия, консультации специалистов, гарантия качества и удобные условия покупки.
Нужен проектор? projector24 большой выбор моделей для дома, офиса и бизнеса. Проекторы для кино, презентаций и обучения, официальная гарантия, консультации специалистов, гарантия качества и удобные условия покупки.
Do you need a master? Local Philly handyman for apartments and houses. Repairs, installation, replacement, and maintenance. Experienced specialists, professional tools, and a personalized approach to every task.
Проблемы с авто? автоэлектрик фольксваген спб диагностика, ремонт электрооборудования, блоков управления, освещения и систем запуска. Опыт, современное оборудование и точное определение неисправностей.
Celebrity World Care https://celebrityworldcare.com интернет-магазин профессиональной медицинской и натуральной косметики для ухода за кожей при ихтиозе, дерматитах, псориазе и других дерматологических состояниях. Сертифицированные средства с мочевиной, без отдушек и парабенов. Доставка по России.
квартиры сочи жк жк светский лес сочи купить квартиру
Модульные дома https://modulndom.ru под ключ: быстрый монтаж, продуманные планировки и высокое качество сборки. Подходят для круглогодичного проживания, отличаются энергоэффективностью, надежностью и возможностью расширения.
Right here is the perfect webpage for anyone who wishes to find out about this topic. You know so much its almost hard to argue with you (not that I really will need to…HaHa). You definitely put a fresh spin on a topic that’s been discussed for a long time. Excellent stuff, just wonderful!
byueuropaviagraonline
Водительская медсправка с психиатром https://med-spravki-msk.ru
Специализированный коррекционно-речевой https://neyroangel.ru детский сад для детей с особенностями развития в Москве. Беремся за самые тяжелые случаи, от которых отказываются другие. Нейропсихолог, логопед, запуск речи. Государственная лицензия: Л035-01298-77/01604531 от 09.12.24
Рэмси Диагностика: https://remsi-med.ru Сеть высокотехнологичных диагностических центров (МРТ, КТ). Точные исследования на оборудовании экспертного класса и качественная расшифровка снимков.
Детский Доктор: https://kidsmedic.ru Специализированный медицинский центр для детей. Квалифицированная помощь педиатров и узких специалистов для здоровья вашего ребенка с первых дней жизни.
Полесская ЦРБ: https://polesskcrb.ru Официальный портал центральной районной больницы Калининградской области. Информация об услугах, расписание врачей и важные новости здравоохранения для жителей региона.
АрсМед: https://arsmedclinic.ru Многопрофильная клиника, предлагающая широкий выбор медицинских услуг от диагностики до лечения. Современный подход и комфортные условия для пациентов всех возрастов.
проектор для фильмов интернет-магазин проекторов
Любишь азарт? up x официальный сайт играть онлайн в популярные игры и режимы. Быстрый вход, удобная регистрация, стабильная работа платформы, понятный интерфейс и комфортные условия для игры в любое время на компьютере и мобильных устройствах.
Любишь азарт? ап икс скачать играть онлайн легко и удобно. Быстрый доступ к аккаунту, понятная навигация, корректная работа на любых устройствах и комфортный формат для пользователей.
интернет магазин люстр сделать деревянную люстру
костюм двойка мужской мужские костюмы
Наш ресурс объединяет ведущих специалистов по автоспорам в Санкт-Петербурге. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, обладающих глубокими знаниями в области автоюридических вопросов. На нашем сайте вы найдёте подробную информацию о юристах, с акцентом на их компетентность и надежность.
Структура сайта разработана с учётом простоты навигации, чтобы помочь вам быстро разобраться во всех возможностях. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, что обеспечивает вам максимальную информированность. https://pbase.com/avtoyurist78spb
Наш ресурс предлагает услуги автоюристов с многолетним опытом. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, обладающих глубокими знаниями в области автоюридических вопросов. На нашем сайте вы найдёте подробную информацию о юристах, с акцентом на их компетентность и надежность.
Структура сайта продумана до мелочей, чтобы помочь вам быстро разобраться во всех возможностях. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, гарантируя вашу уверенность в качестве предоставляемых данных. https://www.minds.com/avtoyurist78spb/
Наш ресурс объединяет ведущих специалистов по автоспорам в Санкт-Петербурге. Мы собрали экспертов с подтверждёнными регалиями и компетенциями, способных эффективно решать самые сложные задачи. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, подчёркивая их профессиональные успехи.
Структура сайта продумана до мелочей, что позволит с лёгкостью найти необходимую услугу. При этом вся информация на ресурсе всегда остаётся достоверной и современной, потому вы можете быть уверены в её надёжности. https://www.bitchute.com/channel/avtoyurist78/
Электромонтажные работы https://electric-top.ru в Москве и области. Круглосуточный выезд электриков. Гарантия на работу. Аварийный электрик.
коррозия у авто? антикоррозийная обработка днища спб эффективная защита от влаги, соли и реагентов. Комплексная обработка кузова и днища, качественные составы и надёжный результат для новых и подержанных авто.
dyson спб pylesos-dn-6.ru .
дайсон сервисный центр санкт петербург pylesos-dn-7.ru .
пылесос dyson пылесос dyson .
Коррозия на авто? antikor-service мы используем передовые шведские материалы Mercasol и Noxudol для качественной защиты днища и скрытых полостей кузова. На все работы предоставляется гарантия сроком 8 лет, а цены остаются доступными благодаря прямым поставкам материалов от производителя.
дайсон где купить в спб dn-pylesos-3.ru .
дайсон пылесос беспроводной купить спб pylesos-dn-6.ru .
пылесос дайсон v15 купить в спб pylesos-dn-7.ru .
Наш ресурс основывается на опыте и знаниях наших экспертов. Мы собрали команду квалифицированных юристов, каждый из которых имеет значительный опыт работы в автомобильной сфере. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, включая их достижения и заслуги.
Структура сайта разработана с учётом простоты навигации, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, что обеспечивает вам максимальную информированность. https://vocal.media/authors/dmitry-volkov
Планируете мероприятие? AI евент уникальные интерактивные форматы с нейросетями для бизнеса. Мы разрабатываем корпоративные мероприятия под ключ — будь то тимбилдинги, обучающие мастер?классы или иные активности с ИИ, — с учётом ваших целей. Работаем в Москве, Санкт?Петербурге и регионах. AI?Event специализируется на организации корпоративных мероприятий с применением технологий искусственного интеллекта.
купить пылесос дайсон в санкт петербурге беспроводной pylesos-dn-6.ru .
пылесос дайсон пылесос дайсон .
купить пылесос дайсон в санкт петербурге беспроводной pylesos-dn-6.ru .
Наш ресурс создан для тех, кто ценит профессиональный подход. Мы собрали группу опытных специалистов, обладающих глубокими знаниями в области автоюридических вопросов. У нас представлено всё, чтобы вы могли легко выбрать подходящего специалиста, с акцентом на их компетентность и надежность.
Структура сайта создана для вашего удобства, делая процесс выбора максимально комфортным. При этом вся информация на ресурсе обновляется и поддерживается в актуальном состоянии, гарантируя вашу уверенность в качестве предоставляемых данных. https://www.are.na/alexei-petrov-ln2uayifcle/hdoko31u9a4
Противопожарные двери https://bastion52.ru купить для защиты помещений от огня и дыма. Большой выбор моделей, классы огнестойкости EI30, EI60, EI90, качественная фурнитура и соответствие действующим стандартам.
Нужны цветы? купить букет роз закажите цветы с доставкой на дом или в офис. Большой выбор букетов, свежие цветы, стильное оформление и точная доставка. Подойдёт для праздников, сюрпризов и важных событий.
пылесос дайсон купить pylesos-dn-7.ru .
купить пылесос дайсон в санкт петербурге беспроводной pylesos-dn-6.ru .
https://mhp.ooo/
Любишь азарт? комета казино официальный сайт современные слоты, live-форматы, понятные правила и удобный доступ с ПК и смартфонов. Играйте онлайн в удобное время.
Лучшее казино up x официальный играйте в слоты и live-казино без лишних сложностей. Простой вход, удобный интерфейс, стабильная платформа и широкий выбор игр для отдыха и развлечения.
Если вам требуется помощь в организации похорон, обратите внимание на наш сайт, где вы найдёте полную информацию о ритуальных услугах в регионе.
Сайт удобно структурирован. Вы легко найдетенеобходимую информацию о процедурах и услугах для принятия взвешенного решения.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. На сайте представлена актуальная информация о стоимости, процедурах и возможностях.
Свяжитесь с нами для консультации, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://coub.com/dd2d095dafae13b32388
Играешь в казино? up-x Слоты, рулетка, покер и live-дилеры, простой интерфейс, стабильная работа сайта и возможность играть онлайн без сложных настроек.
Лучшее казино up x казино играйте в слоты и live-казино без лишних сложностей. Простой вход, удобный интерфейс, стабильная платформа и широкий выбор игр для отдыха и развлечения.
Играешь в казино? ап икс скачать Слоты, рулетка, покер и live-дилеры, простой интерфейс, стабильная работа сайта и возможность играть онлайн без сложных настроек.
Если вам требуется помощь в организации похорон, обратите внимание на наш сайт, который специализируется на ритуальных услугах в Ульяновске.
Сайт предлагает продуманную навигацию. Вы легко найдетевсё, что нужно для планирования похорон и сможете сделать правильный выбор.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. На сайте представлена актуальная информация о стоимости, процедурах и возможностях.
Оставьте заявку на сайте, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://www.cheaperseeker.com/u/linkcorp
Наш сайт предлагает полное сопровождение в вопросах организации похорон.
Сайт удобно структурирован. Вы легко найдетенеобходимую информацию о процедурах и услугах и сможете сделать правильный выбор.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. Вы сможете ознакомиться с расценками, перечнем услуг и сопутствующими вопросами.
Свяжитесь с нами для консультации, и получите полную поддержку на всех этапах. https://www.instapaper.com/p/roadtocash1
Наш сайт поддержит вас в сложный момент, предоставив профессиональные услуги.
Сайт разработан для вашего удобства. Вы легко найдетенеобходимую информацию о процедурах и услугах и сможете сделать правильный выбор.
Мы понимаем, насколько важна точность и внимание к деталям в таких деликатных вопросах. На сайте представлена актуальная информация о стоимости, процедурах и возможностях.
Заполните форму для связи, и мы вам поможем, чтобы обсудить условия сотрудничества и получить дополнительные разъяснения. https://pbase.com/ritualservices73
дайсон центр в спб pylesos-dn-kupit-8.ru .
пылесос дайсон беспроводной спб пылесос дайсон беспроводной спб .
https://plitmart.ru/kak-vybrat-stroitelnye-lyulki-osobennosti-i-sovety-po-vyboru/
Самые качественные https://bliny-olimpiiskie.ru широкий выбор весов и форматов. Надёжные материалы, удобная посадка на гриф, долговечное покрытие. Подходят для фитнеса, пауэрлифтинга и регулярных тренировок.
пылесос dyson купить пылесос dyson купить .
dyson пылесос купить спб pylesos-dn-kupit-10.ru .
Наш сайт предлагает полное сопровождение в вопросах организации похорон.
Удобная структура позволяет без труда найтиразделы с детальным описанием всех процессов.
Вся информация постоянно обновляется, обеспечивая точность и актуальность.
Оставьте заявку на сайте, мы оперативно ответим на все ваши вопросы. https://bio.site/ritual73ulyanovsk
пылесос дайсон беспроводной спб pylesos-dn-kupit-8.ru .
дайсон официальный сайт в санкт петербург дайсон официальный сайт в санкт петербург .
пылесосы дайсон пылесосы дайсон .
пылесосы дайсон санкт петербург пылесосы дайсон санкт петербург .
This tool provides organized access to movie recommendations.Every collection contains movie posters, preview trailers, and direct streaming access,and the collections are sorted by various interests.The platform is actively maintained with latest releases.This approach organizes content for effortless discovery.You can explore these resources at your convenience. https://cinepicker.com/
dyson магазин в спб dyson магазин в спб .
купить пылесос дайсон в санкт петербурге беспроводной купить пылесос дайсон в санкт петербурге беспроводной .
Когда важны не обещания, а реальные выплаты, служба по контракту предлагает четко зафиксированные условия и стабильный доход. Такой формат позволяет строить планы без сомнений. Сделай выбор и начни действовать – ханты мансийск контракт
You can explore various cinematic themes through this service.Each selection includes high-quality posters, engaging trailers, and convenient streaming links,and the collections are structured around diverse topics.Recent titles are consistently added to keep the selection current.This approach streamlines your search by bringing together key elements.You can browse the collections at your own pace. https://cinepicker.com/
заклепка вытяжная 8х10 заклепка алюм вытяжная
Кент казино предлагает удобный формат онлайн игры без лишних сложностей. Регистрация занимает минимальное время. После входа пользователь получает доступ к каталогу игр. Все основные разделы расположены логично. Это упрощает использование сервиса: kent casino играть
This resource is designed to help you discover interesting movies.Every collection contains film posters, trailer videos, and streaming service integrations,and the collections are structured around diverse topics.New titles are constantly added to keep the selection current.This approach streamlines your search by bringing together all necessary elements.You can utilize this tool for your viewing pleasure. https://cinepicker.com/
Why users still use to read news papers when in this technological globe the whole thing is presented on net?
byueuropaviagraonline
This comprehensive platform serves as a guide for film enthusiasts.Every collection provides visual posters, video trailers, and practical streaming guides,and the collections are structured around diverse topics.The content is frequently updated with fresh picks.This approach simplifies movie selection via a comprehensive platform.You can find recommendations that match your taste. https://cinepicker.com/
bahis sitesi 1xbet bahis sitesi 1xbet .
one x bet 1xbet-yeni-giris-2.com .
You can explore various film themes through this service.Each selection features posters, trailers, and direct links to streaming services,and the collections are sorted by various interests.The platform is continuously maintained with new releases.This approach simplifies movie selection via a comprehensive platform.You can access this content easily. https://cinepicker.com/
1xbet g?ncel adres 1xbet g?ncel adres .
1 xbet giri? 1xbet-yeni-giris-2.com .
This site offers a curated approach to film discovery.Each selection features high-quality posters, engaging trailers, and convenient streaming links,and the collections are organized by themes and categories.The platform is continuously maintained with latest releases.This approach organizes content for effortless discovery.You can browse the collections leisurely. https://cinepicker.com/
дизайн проект коттеджа фото дизайн загородных коттеджей
Kush официальный сайт предлагает удобный формат игры онлайн. Регистрация занимает пару минут. Вход доступен круглосуточно. Начни прямо сейчас: казино куш регистрация
новости про машины avto-zhurnal-4.ru .
https://svobodapress.com.ua/karta-brovariv/
журналы для автолюбителей avto-zhurnal-4.ru .
дизайн ванной в квартире дизайн квартиры 58 кв м двухкомнатной
автомобильная газета автомобильная газета .
журнал про машины журнал про машины .
журнал автомобильный журнал автомобильный .
ОЭРН – профильный сервис для проверки компетенций и статуса экспертов по экспертизе недр. Портал упрощает выбрать эксперта по направлениям: геология и ГРР, ТПИ, нефть и газ – и снизить риски при согласовании отчетов и заключений в проектах: отчетность о ресурсах и запасах твердых полезных ископаемых
Казино Кактус бонусы делают игру еще интереснее. После регистрации открывается полный доступ к платформе. Вход выполняется быстро. Используй шанс прямо сейчас – cactus casino официальный сайт
полотенцесушитель водяной полотенцесушитель купить в москве
https://t.me/sex_vladivostoka
карнизы с электроприводом karnizy-s-elektroprivodom77.ru .
электрокарнизы для штор цена электрокарнизы для штор цена .
гардина с электроприводом karnizy-s-elektroprivodom77.ru .
Производство специализированных стеллажей позволяет решать нестандартные задачи хранения. Мы изготавливаем конструкции для катушек, кабельных барабанов, поддонов и автостекол. Все изделия разрабатываются индивидуально. Это обеспечивает безопасность продукции и удобство складских операций – глубинные стеллажи
карниз с приводом для штор karnizy-s-elektroprivodom77.ru .
Do you love gambling? https://cryptodepositcasinos.com allow you to play online using Bitcoin and altcoins. Enjoy fast deposits, instant payouts, privacy, slots, and live dealer games on reliable, crypto-friendly platforms.
nov? online casino nov? online casino .
automaty online casino-cz-1.com .
https://corp.en.cx/Guestbook/Messages.aspx?page=1&fmode=gb&topic=386110&anchor#7983049 фреоновое масло
online casino online casino .
Casino 7k создаёт комфортные условия для онлайн игроков. Быстрый вход в аккаунт и понятный личный кабинет упрощают управление профилем. Сайт не перегружен лишними элементами. Это делает игру более приятной – 7k casino регистрация
лазерная косметология центр косметологии москва
выездной шиномонтаж 24 москва
Нужен сувенир или подарок? https://gifts-kazan.online для компаний и мероприятий. Бизнес-сувениры, подарочные наборы и рекламная продукция с персонализацией и доставкой.
Лучшие подарки и сувениры https://perm-suveniry.ru нанесение логотипа, подарочные наборы, промо-продукция и деловые аксессуары для мероприятий и компаний.
Нужна бытовая химия? бытовая химия для дома моющие и чистящие средства, порошки и гели. Удобный заказ онлайн, акции и доставка по городу и регионам.
UEFA Champions League https://sampiyonlar-ligi.com.az matches, results, and live scores. See the schedule, standings, and draw for Europe’s premier club competition.
Free online games 1001.com.az for your phone and computer. Easy navigation, quick start, and a variety of genres with no downloads required.
mobiln? casino casino-cz-15.com .
ruleta online casino-cz-15.com .
hrac? automaty online hrac? automaty online .
cz online casina cz online casina .
casino bonus bez vkladu casino bonus bez vkladu .
?esk? online casina ?esk? online casina .
nov? online casino nov? online casino .
mostbet plinko strategiya http://mostbet69573.help/
mostbet Oʻzbekistonda stavka https://mostbet69573.help/
mostbet Oʻzbekiston ios http://mostbet69573.help
Мы пишем о детях и воспитании с вниманием к деталям, рассказываем о новинках индустрии красоты и помогаем ориентироваться в мире моды. Наш журнал создан для вдохновения и поддержки. Переходите по ссылке и открывайте новые материалы https://universewomen.ru/
выездной шиномонтаж 24 https://vyezdnoj-shinomontazh-77.ru
шумоизоляция арок авто https://shumoizolyaciya-arok-avto-77.ru
Трезвый выбор http://www.med-2c.ru/kak-proxodit-vyvod-iz-zapoya-na-domu-v-peterburge-podrobnyj-razbor-procedury-i-chego-ozhidat/ .
trezviy vibor https://www.med-2c.ru/kak-proxodit-vyvod-iz-zapoya-na-domu-v-peterburge-podrobnyj-razbor-procedury-i-chego-ozhidat/ .
Посещение шоурума в Москве часто превращается в отдельное событие. Уютная атмосфера, внимание к деталям и возможность примерить вещи в спокойной обстановке создают совершенно другой уровень сервиса. Это удобная альтернатива шумным торговым центрам: https://forextema.com/index.php?option=com_easyblog&view=entry&id=14407&Itemid=75
Медицинский сайт https://nogostop.ru об анатомии, патологиях и способах лечения. Симптомы, профилактика, современные препараты и рекомендации врачей в доступной форме.
Информационный портал https://diok.ru о событиях в мире, экономике, науке, автомобильной индустрии и обществе. Аналитика, обзоры и ключевые тенденции.
trezviy-vibor https://detkiportal.ru/vyvod-iz-zapoya-v-donecke-anonimno/ .
trezviy vibor drplas.ru/blefaroplastika/reabilitatsiya/narkolog-na-dom-v-volgograde.html .
trezviy vibor https://www.kuban-mama.ru/wp-prochee/vyvod-iz-zapoya-v-rostove-na-donu.html .
Сайт о фермерстве https://webferma.com и садоводстве: посадка, удобрения, защита растений, теплицы и разведение животных. Полезные инструкции и современные агротехнологии.
Справочный IT-портал https://help-wifi.ru программирование, администрирование, кибербезопасность, сети и облачные технологии. Инструкции, гайды, решения типовых ошибок и ответы на вопросы специалистов.
Новости и обзоры https://mechfac.ru о мире технологий, экономики, крипторынка, культуры и шоу-бизнеса. Всё, что важно знать о современном обществе.
В московских шоурумах можно собрать гардероб для разных сфер жизни от работы до отдыха. Продуманная структура ассортимента облегчает этот процесс. Подробнее по ссылке – https://1wum.ru/forum/?PAGE_NAME=profile_view&UID=54714&MUL_MODE=
капитальный ремонт зданий капитальный ремонт зданий .
кв дизайн интерьеры дизайн интерьера услуги
Все самое интересное новостной сайт с лентой последних событий, аналитикой и комментариями экспертов. Оперативные публикации и аналитика каждый день.
Новый Apple iPhone 17 купить в СПб уже в продаже в Санкт?Петербурге! В интернет?магазине i4you вас ждёт широкий выбор оригинальных устройств Apple по выгодным ценам. На каждый смартфон действует официальная гарантия от производителя сроком от года — вы можете быть уверены в качестве и долговечности покупки.
Планируешь ремонт? ремонт ванной комнаты от косметического обновления до капитальной перепланировки. Индивидуальный подход, современные технологии и официальное оформление договора.
выполнение курсовых работ выполнение курсовых работ .
Проблемы с зубами? альбадент профилактика, лечение, протезирование и эстетическая стоматология. Забота о здоровье зубов с применением передовых методик.
Professional сonstruction Moraira: architecture, engineering systems, and finishing. We work with local regulations and regional specifics in mind. We handle permitting and material procurement so you can enjoy the creative process without the stress of management.
Охраны труда для бизнеса центр охраны труда аудит системы безопасности, обучение персонала, разработка локальных актов и внедрение стандартов. Помогаем минимизировать риски и избежать штрафов.
курсовые под заказ курсовые под заказ .
Получение медицинской https://gira-spravki2.ru справки с доставкой после официального оформления. Комфортная запись, минимальные сроки и законная выдача документа.
Орби казино https://orby-casino.com/ онлайн-платформа с широким выбором слотов, настольных игр и бонусных предложений. Узнайте об акциях, турнирах и возможностях для комфортного игрового досуга.
Онлайн казино Орби orby casino com большой выбор слотов, бонусы для новых и постоянных игроков, регулярные турниры с призами.
Чудові бонуси казино — депозитні бонуси, бездепозитні бонуси та Турнір з призами. Обзори пропозицій і правила участі.
Найпопулярніша платформа інтернет казіно – популярні слоти, бонуси та турніри з призами. Огляди гри та правила участі в акціях.
решение курсовых работ на заказ решение курсовых работ на заказ .
Найкращі онлайн ігри казино – безліч ігрових автоматів, правил, бонусів покерів і. Огляди, новинки спеціальні
Квартиры в новостройках https://domik-vspb.ru от застройщика — студии, однокомнатные и семейные варианты. Сопровождение сделки и прозрачные условия покупки.
где можно купить курсовую работу где можно купить курсовую работу .
купить курсовую купить курсовую .
Carbon credits https://offset8capital.com and natural capital – climate projects, ESG analytics and transparent emission compensation mechanisms with long-term impact.
шумоизоляция авто
Свежие новости SEO https://seovestnik.ru и IT-индустрии — алгоритмы, ранжирование, веб-разработка, кибербезопасность и цифровые инструменты для бизнеса.
Здравствуйте дорогие друзья! Сегодня затронем тему — гидроизоляция коммерческой недвижимости. Суть здесь в чем: мокрые потолки — головная боль. Ищешь решение — могу рекомендовать: https://montazh-membrannoj-krovli-spb.ru. Как правило знаю, что коммерческие объекты нуждаются в гарантиях. Ну вот арендаторы ждут — соответственно работы идут быстро. На первом этапе отражающие покрытия — крыша не перегревается. Что в итоге: это работает сохранить здание.
Бассейн на даче под ключ цена https://atlapool.ru
Последние обновления: https://parfum-mir.ru/internet-magazin/folder/jenifer-lopez/
Нужны казино бонусы? https://kazinopromokod.ru — бонусы за регистрацию и пополнение счета. Обзоры предложений и подробные правила использования кодов.
Онлайн покер покерок официальный сайт — турниры с крупными гарантиями, кеш-игры и специальные предложения для игроков. Обзоры форматов и условий участия.
сделать реферат сделать реферат .
Все о фундаменте https://rus-fundament.ru виды оснований, расчет нагрузки, выбор материалов и этапы строительства. Практичные советы по заливке ленточного, плитного и свайного фундамента.
Портал о жизни в ЖК https://pioneer-volgograd.ru инфраструктура, паркинг, детские площадки, охрана и сервисы. Информация для будущих и действующих жителей.
Все о ремонте квартир https://belstroyteh.ru и отделке помещений — практические инструкции, обзоры материалов и современные решения для интерьера.
Всё про строительство https://hotimsvoydom.ru и ремонт — проекты домов, фундаменты, кровля, инженерные системы и отделка. Практичные советы, инструкции и современные технологии.
Найкращі бонуси казино — депозитні акції, бездепозитні пропозиції та турніри із призами. Огляди та порівняння умов участі.
Грати в найкраще казіно ігри — широкий вибір автоматів та настільних ігор, вітальні бонуси та спеціальні пропозиції. Дізнайтеся про умови участі та актуальні акції.
реферат нейросеть реферат нейросеть .
ии реферат ии реферат .
Здравствуйте дорогие друзья! Очень актуальная тема — выбор кровельного материала. Здесь такой момент: если нужен профессиональный монтаж — могу рекомендовать сервис: https://montazh-membrannoj-krovli-spb.ru. На практике убедился, что ПВХ мембрана — один из самых эффективных способов гидроизоляции. Например, битум плавится на солнце — соответственно мембрана этого лишена. Основные этапы: выбрать толщину мембраны. Вместо заключения: реальный эффект — крыша без проблем на годы.
сайт для рефератов сайт для рефератов .
Грати в найкращі слоти – великий каталог автоматів, бонуси за реєстрацію та регулярні турніри. Інформація про умови та можливості для гравців.
Онлайн ігри казино онлайн – великий вибір автоматів, рулетки та покеру з бонусами та акціями. Огляди, новинки та спеціальні пропозиції.
нейросеть для школьников и студентов нейросеть для школьников и студентов .
slot oyunu https://mineslot.club/tr/ piksel grafikler, bonus ogeler ve ilgi cekici mekanikler. Oyunun kurallar? ve ozellikleri hakk?nda bilgi edinin.
slot oyunu minecraft slotu piksel grafikler, bonus ogeler ve ilgi cekici mekanikler. Oyunun kurallar? ve ozellikleri hakk?nda bilgi edinin.
slot mine drop nasil oynanir oyunu, modern grafiklere ve ozgun bir konsepte sahip. Oyunun format?, bahis secenekleri ve oynan?s ozellikleri hakkinda daha fazla bilgi edinin.
Попробуйте https://zeusvshades250.com/ru/ — игровой автомат с мифологическим сюжетом, бонусными раундами и оригинальной механикой.
A catalog of cars https://www.auto.ae/catalog/ across all brands and generations—specs, engines, trim levels, and real market prices. Compare models and choose the best option.
A convenient car catalog https://auto.ae/catalog/ brands, models, specifications, and current prices. Compare engines, fuel consumption, trim levels, and equipment to find the car that meets your needs.
Wiadomosci tenisowe https://teniswiadomosci.pl z Polski i ze swiata: najnowsze wyniki meczow, rankingi zawodniczek, analizy turniejow i wywiady z zawodniczkami. Sledz wydarzenia ATP i WTA, dowiedz sie o zwyciestwach, niespodziankach i najwazniejszych meczach sezonu.
проект на водопонижение xn—77-eddkgagrc5cdhbap.xn--p1ai .
вакуумное водопонижение иглофильтрами xn—77-eddkgagrc5cdhbap.xn--p1ai .
mostbet восстановить пароль http://www.mostbet61527.help
Julie Cash http://www.juliecash.online on OnlyFans features exclusive content, private posts, and regular updates for subscribers. Subscribe to gain access to original content and special offers.
водопонижение строительных котлованов водопонижение строительных котлованов .
водопонижение котлована xn—77-eddkgagrc5cdhbap.xn--p1ai .
mostbet слоты на деньги http://www.mostbet61527.help
мостбет приложение 2026 http://www.mostbet61527.help
водопонижение котлована иглофильтрами xn—77-eddkgagrc5cdhbap.xn--p1ai .
sms activation github.com/SMS-Activate-Alternatives .
осушение котлованов осушение котлованов .
sms activate website sms activate website .
sms activation github.com/SMS-Activate-Alternatives .
mostbet пополнить счет 2026 mostbet пополнить счет 2026
mostbet создать аккаунт https://www.mostbet61527.help
Играешь в казино? https://eva-vlg.ru популярная онлайн-платформа с большим выбором слотов, настольных игр и лайв-казино. Бонусы для новых игроков, регулярные акции и удобные способы пополнения доступны круглосуточно.
1win Dota 2 tikish https://www.1win5767.help
1win plinko o‘yin https://1win5767.help/
1win Oson depozit 1win Oson depozit
Нужны столбики? столбики ограждения с вытяжной лентой столбики для складов, парковок и общественных пространств. Прочные материалы, устойчивое основание и удобство перемещения обеспечивают безопасность и порядок.
купить провод проводка купить
вывод из запоя в ростове-на-дону вывод из запоя в ростове-на-дону .
вывод из запоя цена в ростове vyvod-iz-zapoya-v-rostove-2.ru .
вывод из запоя в ростове-на-дону на дому vyvod-iz-zapoya-v-rostove-2.ru .
вывод из запоя в ростове на дону на дому vyvod-iz-zapoya-v-rostove-2.ru .
магазин свадебных платьев каталог свадебных платьев с ценами
Нужны столбики? металлические столбики ограждение столбики для складов, парковок и общественных пространств. Прочные материалы, устойчивое основание и удобство перемещения обеспечивают безопасность и порядок.
шумоизоляция торпеды
шумоизоляция дверей авто https://shumoizolyaciya-dverej-avto.ru
интернет кабель купить магазин электрики в минске
наркологическая клиника в ростове вывод из запоя vyvod-iz-zapoya-v-rostove-2.ru .
вывод из запоя в стационаре в ростове на дону вывод из запоя в стационаре в ростове на дону .
Нужны столбики? столбики ограждения с вытяжной лентой столбики для складов, парковок и общественных пространств. Прочные материалы, устойчивое основание и удобство перемещения обеспечивают безопасность и порядок.
купить провод 2 2 кабель минск
mostbet казино регистрация mostbet казино регистрация
мобильные стойки ограждения мобильные стойки с вытяжной лентой
свадебные платья цена купить https://svadebnye-platya-msk.ru
Publicaciones unicas amouranth noticias de vanguardia y contenido original. Mantengase al dia y no se pierda ninguna novedad.
La pagina oficial de https://evaelfie.es ofrece contenido exclusivo, noticias de ultima hora y actualizaciones periodicas. Mantengase al dia con las nuevas publicaciones y anuncios.
99 down caiu.site .
99 caiu caiu.site .
MMORPG игра Скрайд — онлайн-мир приключений, сражений и развития персонажа. Выбирайте класс героя, исследуйте локации, участвуйте в PvP и PvE боях, вступайте в гильдии и проходите квесты в захватывающей многопользовательской игре.
Мучает варикоз? эвлк информационный сайт о здоровье вен и лечении варикоза ног: УЗДС диагностика, лечение варикоза, ЭВЛО (лазерное лечение), склеротерапия, восстановление и компрессионный трикотаж. Рекомендации врача, ответы на частые вопросы и профилактика варикоза.
Found a bride? wedding proposal in Barcelona romantic scenarios, beautiful locations, photo shoots, decor, and surprises for the perfect declaration of love. Make your engagement in Barcelona an unforgettable moment in your story.
mostbet бонус на депозит mostbet бонус на депозит
мостбет apk Киргизия https://mostbet96810.help
mines игра мостбет mines игра мостбет
Нужен юрист? адвокат по арбитражным спорам представительство в арбитражном суде, защита интересов бизнеса, взыскание задолженности, споры по договорам и сопровождение судебных процессов для компаний и предпринимателей.
стойкие духи женские https://elicebeauty.com/makiyazh/litso/tonalnie-sredstva/ss-krem-volshebniy-makiyazh-lirene-cc-sream-magic-make-up.html
mostbet двухфакторная защита mostbet двухфакторная защита
мостбет верификация сколько дней https://mostbet96810.help
заказать кухню с установкой zakazat-kuhnyu-4.ru .
Dwuspadowe aluminiowe zadaszenia tarasowe https://aluminum-etrrace-canopies.ru
Нужна гостиница? гостиница площадь ильича уютные номера рядом с метро и деловым центром города. Удобное размещение для туристов и деловых поездок, комфортные условия проживания, современный сервис и удобная транспортная доступность.
заказать кухню по индивидуальному проекту zakazat-kuhnyu-4.ru .
заказать кухню с доставкой zakazat-kuhnyu-4.ru .
мостбет вход в личный кабинет mostbet15247.help
mostbet ios Кыргызстан https://mostbet96810.help/
1вин пополнение счета в сумах https://1win36247.help/
1win официальный apk 1win68017.help
Should I propose to a girl? top-rated proposal venues near Barcelona
1win бонус за первый депозит 1win бонус за первый депозит
1win обновление apk 1win обновление apk
1win mines как выиграть 1win36247.help
1win лайв казино Кыргызстан http://1win68017.help
1вин lucky jet 1вин lucky jet
школа-пансион бесплатно shkola-onlajn-33.ru .
ломоносов скул ломоносов скул .
навес под машину https://zakazat-naves.ru
1win регистрация 1win регистрация
Proposed to a girl proposal in Barcelona
где можно навесы заказать авто навес заказать
игра aviator 1вин игра aviator 1вин
1win актуальная ссылка http://1win68017.help
downdetector brasil caiu.site .
1вин вывод Киргизия https://www.1win20819.help
мелбет кз слоты демо режим мелбет кз слоты демо режим
melbet maib http://melbet42310.help/
internet down caiu.site .
1win демо режим казино 1win демо режим казино
AWS caiu caiu.site .
1win пополнение Bakai Bank 1win пополнение Bakai Bank
мелбет правила бонуса https://www.melbet60432.help
1win не заходит в аккаунт 1win82361.help
A platform for searching https://grand-screen.com and comparing mobile apps. Explore features, reviews, ratings, and user feedback. The Android and iOS app catalog helps you find the best services for work, communication, and entertainment.
Портал о строительстве https://sdhhbsteel.com и промышленности: новости отрасли, технологии, оборудование, строительные материалы и производственные решения. Полезная информация, аналитика и обзоры для специалистов и компаний.
Обзоры дрелей https://drel-interskol.ru и электроинструмента для дома и профессиональной работы. Сравнение моделей, характеристики, преимущества и недостатки популярных дрелей. Полезные советы по выбору инструмента для ремонта, строительства и бытовых задач.
Сертификация товаров http://www.certif-test.ru представляет собой официальный процесс подтверждения соответствия продукции установленным стандартам качества, безопасности и экологичности. В основе этого понятия лежит проверка изделий независимыми органами на предмет соблюдения нормативов, таких как ГОСТ, ISO или отраслевые требования. Что такое сертификация товаров? Это не просто формальность, а комплекс мер, включающих лабораторные тесты, аудит производства и выдачу сертификата, который служит доказательством надежности продукта. Без сертификации многие товары не допускаются на рынок, особенно в сферах пищевой промышленности, электроники и медицинских изделий, где риски для здоровья потребителей особенно высоки.
Сертификация товаров http://www.vnii-certification.ru это процесс официального подтверждения соответствия продукции установленным стандартам качества, безопасности и экологичности. В современном мире, где потребители все чаще обращают внимание на надежность и происхождение товаров, сертификация играет ключевую роль в обеспечении доверия на рынке. Она помогает производителям и поставщикам демонстрировать, что их продукция соответствует нормам, а также защищает интересы покупателей. Существуют различные типы сертификации товаров, которые можно разделить на обязательную и добровольную, каждая из которых имеет свои особенности и цели. В этой статье мы разберем, что такое сертификация товаров и почему она важна для бизнеса и потребителей.
Аренда авто Сочи https://avto-arenda-sochi.ru
monro casino online https://azastroteam.ru
SEO-продвижение https://outreachseo.ru сайта для роста посещаемости и увеличения продаж. Проводим аудит, оптимизацию структуры, работу с контентом и техническими параметрами сайта, чтобы улучшить позиции в поисковых системах и привлечь целевой трафик.
1win игра aviator https://www.1win17043.help
mostbet cashback https://mostbet63218.help/
кольцо из белого золота цена кольцо для помолвки
Find out the exact https://www.the-weather-in-budva.com today. Detailed 7- and 10-day forecasts, including temperature, wind, precipitation, humidity, and pressure. Up-to-date weather information for Budva on the Adriatic coast for tourists and residents.
Если вы подбираете лучшие казино на рубли, смотрите шире, чем просто наличие RUB в кассе. Важно, чтобы рублёвые операции были реально удобными: без лишних шагов, с адекватными лимитами и понятными правилами по выводу (часто встречается требование выводить тем же методом, что пополняли). Мы публикуем свежие подборки и обновления по таким площадкам в Telegram – там проще сравнить варианты и выбрать подходящий. https://t.me/s/rating_casino_russia/25
Explore detailed insights on https://topxclocks.com/dbtech-clocks/ dbtech clocks at TopXClocks, including features, comparisons, and expert recommendations for smarter buying decisions.
Информационный портал https://tga-info.ru/ со статьями и обзорами на разные темы. Материалы о технологиях жизни работе доме и повседневных вопросах. Актуальные новости полезные советы рекомендации и интересная информация для читателей.
Интернет ресурс https://nesmetnoe.ru/ с полезными статьями советами и обзорами. Материалы о жизни здоровье технологиях доме и повседневных вопросах. Практические рекомендации интересные факты и актуальная информация для широкой аудитории.
mostbet karta fotosi mostbet karta fotosi
Статьи о любви https://lifeoflove.ru отношениях, психологии и семейной жизни. Советы по гармоничным отношениям общению и саморазвитию. Полезные рекомендации вдохновляющие истории и материалы для тех кто хочет улучшить личную жизнь.
Материалы о компьютерах https://www.hardexpert.net технологиях электронике и IT. Обзоры техники советы по выбору комплектующих настройке программ и использованию устройств. Полезная информация для пользователей и любителей технологий.
Сборник полезных советов https://allsekrets.ru и лайфхаков на каждый день. Материалы о доме здоровье красоте и повседневной жизни. Интересные статьи практические рекомендации и идеи которые помогут упростить бытовые задачи.
Информация о ремонте https://hyundai-sto.ru обслуживании и диагностике автомобилей Hyundai. Советы по техническому обслуживанию выбору запчастей и эксплуатации автомобиля. Полезные материалы для владельцев и автолюбителей.
mostbet Oʻzbekiston android mostbet Oʻzbekiston android
Лучшие сервера Обзоры и рейтинг хостинг-провайдеров сравнение dedicated servers по цене, производительности и надежности. Рейтинг хостингов, которые предлагают мощные серверные решения.
Найти лучший сервер подобрать качественный VPS рейтинг dedicated servers от популярных хостинг-провайдеров. Сравните выделенные серверы по характеристикам, стоимости и возможностям масштабирования для бизнеса и веб-проектов.
Рейтинги серверов https://rating-vps-2026.ru актуальный рейтинг dedicated server хостинга с сравнением характеристик, стоимости и производительности. Найдите оптимальный сервер для бизнеса, интернет-магазина, SaaS-сервисов и крупных сайтов.
Обзор и рейтинги серверов рейтинг VPS сравните выделенные серверы по характеристикам, цене, процессорам и дискам SSD. Выберите надежный сервер для размещения сайтов, приложений и высоких нагрузок.
Профессиональный запой выезд дом детоксикация организма, помощь при алкогольной интоксикации и восстановление самочувствия пациента. Специалист приезжает на дом и оказывает профессиональную помощь.
Гарантированный безопасный запой нарколог дом вывод из запоя с наблюдением, детоксикацией организма и поддержкой врача. Процедуры направлены на восстановление состояния пациента и улучшение самочувствия.
mostbet rasmiy havola http://www.mostbet28461.help
mostbet location required https://mostbet53160.help/
mostbet ingyenes nyerőgépek http://www.mostbet2023.help
Cost-effective marketplace social media youtube profiles offers competitive rates without compromising on account quality, verification completeness, or delivery speed. The catalog is segmented by platform, geo, account type, and price tier to simplify navigation for both new and returning customers. Build your campaigns on accounts with proven trust — higher trust means better delivery, lower costs, and fewer interruptions.
Інформаційний портал https://pensioneram.in.ua для пенсіонерів України Корисні поради про пенсії, соціальні виплати, пільги, здоров’я та повсякденне життя. Актуальні новини, рекомендації фахівців та прості пояснення важливих змін законодавства.
Сайт про народні прикмети https://zefirka.net.ua тлумачення снів та значення імен. Дізнайтеся, що означають сни, як трактуються прикмети та які традиції пов’язані зі святами різних народів.
Сайт міста Дніпро https://faine-misto.dp.ua з актуальними новинами, подіями та корисною інформацією для мешканців та гостей. Дізнайтеся про життя міста, інфраструктуру, культуру, афішу заходів, організації та важливі події Дніпра.
Чоловічий блог https://u-kuma.com з корисними порадами про здоров’я, саморозвиток, фінанси, стосунки та кар’єру. Публікуємо цікаві статті, лайфхаки та рекомендації для чоловіків, які хочуть покращити своє життя.
Жіночий сайт https://u-kumy.com про красу, здоров’я, моду, відносини і стиль життя. Корисні поради, статті, ідеї для натхнення та рекомендації для сучасних жінок. Читайте про саморозвиток, сім’ю, догляд за собою та актуальні тренди.
Sports betting at Mostbet https://mostbet.edu.pl/. The platform offers a wide range of events, high odds, bonuses, and a user-friendly mobile app. Place bets on football, hockey, tennis, and other sports.
Perfect Date official https://www.perfect-date.org website offers detailed information about the characters, plot, and gameplay features. Read the news and stay up-to-date on the latest updates.
аудит продвижения сайта prodvizhenie-sajtov-v-moskve16.ru .
Treasure of Nadia https://treasure-of-nadia.org Official Game Site with detailed information about the adventure game. Read news, learn about the characters, and learn about the gameplay features.
Женский портал https://7krasotok.com о красоте, здоровье, моде и отношениях. Полезные советы, статьи о семье, психологии и саморазвитии. Читайте рекомендации экспертов, узнавайте о трендах и находите вдохновение для гармоничной жизни.
Женский онлайн https://krasotka-fl.com.ua портал с полезными материалами о красоте, здоровье, моде и отношениях. Советы по уходу за собой, психологии и саморазвитию для современной женщины.
сделать аудит сайта цена prodvizhenie-sajtov-v-moskve16.ru .
Любишь азарт? pin-up casino зеркало предлагает разнообразные игровые автоматы, настольные игры и интересные бонусные программы. Платформа создана для комфортной игры и предлагает широкий выбор развлечений.
продвижения сайта в google продвижения сайта в google .
seo partner program prodvizhenie-sajtov-v-moskve16.ru .
Широкий выбор ковров представлен в интернет магазине нашего города Краснодар, подходящий для всех стилей интерьера.
Ковер шерстяной
Наш приоритет – своевременная и целостная доставка каждого заказа.
pinup tez kirish http://www.pinup76809.help
Консультация семейного юриста поможет быстро разобраться в сложных жизненных ситуациях: развод, раздел имущества, алименты, споры о детях и брачные договоры. Перейдя по запросу юрист по семейному законодательству – специалист объяснит ваши права, оценит перспективы дела и предложит оптимальный план действий. Получите профессиональную юридическую помощь и ответы на все вопросы по семейному праву.
мостбет доступ сегодня мостбет доступ сегодня
nye-online-kasinoer-med-gratis-triks
Take a look at my web page; spiny
no-deposit-codes-canada-casino-keep-what-you-win
Also visit my site … golden – Gena,
como-se-gana-en-el-casino-online
My web page … maquinitas
рейтинг диджитал агентств рейтинг диджитал агентств .
закупка ссылок в гугл заказать услугу агентство закупка ссылок в гугл заказать услугу агентство .
статьи про маркетинг и seo статьи про маркетинг и seo .
mostbet pul nə vaxt çıxır http://www.mostbet85214.help
mostbet indir https://mostbet85214.help/
интернет маркетинг агентство интернет маркетинг агентство .
материалы по seo материалы по seo .
seo partner program seo partner program .
сео центр seo-kejsy17.ru .
продвижение сайтов топ агентство reiting-seo-kompanii.ru .
Продвигайте свой аккаунт быстрее с помощью накрутки подписчиков в TikTok. Перейдя по запросу накрутка подписчиков в тикток вы сможете увеличить количество фолловеров, повысить доверие к профилю и привлечь больше просмотров и лайков. Быстрая и безопасная накрутка поможет вашему контенту попасть в рекомендации и ускорить рост аккаунта. Подходит для блогеров, брендов и бизнеса, которые хотят развиваться в TikTok и получать больше охватов.
Откровенные видео можно транслировать на надежных платформах для обеспечения конфиденциальности.
Откройте для себя безопасные веб-сайты
для качественного просмотра.
Review my blog post – Buy Rivotril
рейтинг агентств интернет маркетинга luchshie-digital-agencstva.ru .
блог агентства интернет-маркетинга блог агентства интернет-маркетинга .
детский стоматолог телефон лечение зубов во сне детям
mostbet şəxsiyyət təsdiqi http://www.mostbet85214.help
интернет раскрутка интернет раскрутка .
google посещаемость сайта google посещаемость сайта .
мелбет кэшбэк киргизия мелбет кэшбэк киргизия
рейтинг компаний seo оптимизации reiting-seo-kompanii.ru .
продвижение сайтов продвижение сайтов .
лучшие seo компании лучшие seo компании .
рейтинг seo оптимизации reiting-seo-kompaniy.ru .
получить короткую ссылку google получить короткую ссылку google .
vavada regulamin vavada regulamin
Бесплатная консультация семейного юриста — это возможность быстро разобраться в сложной ситуации и понять свои права. Перейдя по запросу юрист по браку юрист поможет вам по вопросам развода, алиментов, раздела имущества, опеки над детьми и другим семейным спорам. Разъясним перспективы дела и подскажем оптимальное решение. Получите профессиональную помощь без оплаты и лишних обязательств.
закупка ссылок в гугл заказать услугу агентство закупка ссылок в гугл заказать услугу агентство .
продвижение сайтов в москве продвижение сайтов в москве .
сео агентство сео агентство .
Бонусы и фриспины доступны сразу после регистрации https://04civil.com/bbs/board.php?bo_table=free&wr_id=5169
ахревс seo-kejsy17.ru .
продвижение сайтов в москве продвижение сайтов в москве .
продвижения сайта в google продвижения сайта в google .
оптимизация сайта франция оптимизация сайта франция .
vavada promocja mines http://www.vavada56378.help
сео агентство сео агентство .
plinko vavada plinko vavada
vavada ranking turniejowy vavada ranking turniejowy
раскрутка и продвижение сайта раскрутка и продвижение сайта .
vavada potwierdzenie tożsamości https://vavada56378.help
Юридическая консультация по разделу имущества поможет защитить ваши права и избежать ошибок при разводе или спорах между собственниками. Переходите по запросу юридическая консультация по разделу имущества в Москве – юрист оценит ситуацию, разъяснит перспективы дела, подскажет, как правильно оформить документы и выстроить стратегию. Вы получите чёткий план действий и поддержку на каждом этапе — от переговоров до суда.
интернет продвижение москва интернет продвижение москва .
топ seo топ seo .
Официальный сайт https://pokervip.ru: регистрация, вход, бонусы и игра в онлайн покер. Обзор возможностей, турниров, кеш-столов и мобильного приложения. Узнайте, как начать играть и выводить деньги на проверенной платформе.
melbet app melbet app
Check out private jet charter fly which offers instant private jet charter booking to over 5000 airports worldwide.
Check cost of private jet to compare private jet rental costs and find the best hourly rates instantly.
интернет агентство продвижение сайтов сео интернет агентство продвижение сайтов сео .
Компания FarbWood https://farbwood.by предлагает пиломатериалы из сибирской лиственницы для частного и коммерческого строительства в Минске и по всей территории Минска. Мы работаем только с лиственницей сибирской, сосна и ель используются как дополнение к основному ассортименту древесины.
Dedicated platform error bm 9999 helps performance teams find the right account infrastructure for scaling their advertising operations efficiently. Detailed usage guides help buyers understand the differences between softreg, selfreg, farmed, and reinstated account types before purchasing. Build your campaigns on accounts with proven trust — higher trust means better delivery, lower costs, and fewer interruptions.
Experienced supplier common mistakes google ads appeal process 2026 offers complete asset packages including login credentials, recovery access, 2FA codes, cookies, and user-agent data. A loyalty program with cashback on every order makes repeated purchases more cost-effective for teams with regular sourcing requirements. Professional media buying starts with professional tools — source from a marketplace built by advertisers, for advertisers.
Growth-focused store onet instagram is built specifically for performance marketers who value transparency, speed, and predictable account quality. The marketplace serves a global buyer base with English-speaking support available via Telegram for product selection and order management. Scale your advertising operations on a foundation of quality — verified profiles, complete credentials, and expert operational support.
Professional service reddit cpm specializes in accounts optimized for paid campaigns with proper warming history and platform trust markers. The team provides onboarding guidance for new buyers and ongoing operational support for teams managing high-volume campaign portfolios. The most successful media buying teams share one trait: they invest in quality infrastructure before they invest in ad spend.
Leading store can you lose monetization on youtube gives media buyers access to aged, warmed, and verified profiles sorted by geo, trust level, and ad readiness. Orders are processed through a secure checkout system with multiple payment options and encrypted credential delivery via personal dashboard. Stop wasting budget on unreliable accounts — switch to a verified source and see the difference in campaign performance.
Юридическая помощь по защите прав ребенка — это поддержка в самых важных ситуациях: от споров о месте проживания и алиментах до защиты от насилия и нарушения прав в школе. Переходите по запросу детский юрист бесплатно и квалифицированный юрист поможет отстоять интересы ребенка, подготовить документы и представить ваши интересы в суде, обеспечив безопасность и справедливость.
дизайнер спб дизайн студия интерьера санкт петербург
Ароматные композиции ручной работы часто создаются небольшими партиями, что делает каждый подарок уникальным. Такие изделия подходят для подарков на праздники, корпоративные мероприятия или просто для создания уюта дома. Подробности по ссылке https://aroma-lavka.ru/
Нестандартный крепеж по чертежам помогает закрывать монтажные задачи спокойно и без лишней спешки, когда для заказчика важны сроки и качество сборки Это удобно для регулярных поставок и серийной сборки https://metizy-optom-moskva.ru/
мостбет пополнение KGS карта https://www.mostbet78063.help
Тензоприбор предлагает калибровочные гири для весов нужного класса точности и номинальной массы для калибровки весов.
В нашей компании можно купить поверочные гири классов точности E1, E2, F1, F2, M1, M2.
Чем выше класс точности, тем меньше будет разница между номинальным и действительным значениями массы калибровочной гири.
mostbet mines qoidalari mostbet mines qoidalari
1win registratsiya 2026 https://www.1win5765.help
Best guide best headphones under 200 for finding quality headphones under 100 dollars with excellent sound reproduction.
Дополнительная информация: высокополигональная и низкополигональная модель агр
Юридическая консультация по лишению родительских прав поможет оценить ситуацию, определить основания и выстроить грамотную стратегию защиты или подачи иска. Переходите по запросу адвокат по родительским правам – специалист разъяснит порядок действий и подготовит документы. Получите профессиональную поддержку и ответы на все вопросы уже на первой консультации.
заказать букет цветов в москве с доставкой на дом недорого http://www.zakazat-cveti-moskva.ru/ .
Профессиональная помощь детям https://neuropsy-centr.ru с нарушениями речи и развития. Высококвалифицированные врачи, работаем с самыми тяжелыми случаями, 99% положительных отзывов, новейшее оборудование и инвентарь. Государственная лицензия: Л035-01298-77/01604531 от 09.12.24
Платная частная клиника https://mypsyhealth.ru/services/drug-treatment-hospital психиатрии, неврологии и наркологии — анонимное лечение и консультации специалистов. Диагностика, помощь при зависимостях, неврологических и психических расстройствах. Конфиденциальность, опытные врачи и комфортные условия.
Top branding agencies https://topbrandagencies.com worldwide: the best studios for brand development, corporate identity, and positioning. Portfolio reviews, strategies, and case studies will help you choose a reliable agency for business development and brand enhancement.
Top web design https://webdesignfirmshub.com companies worldwide: a selection of the best studios for website and interface creation. Learn about case studies, design approaches, UX/UI solutions, and innovations to help you choose a reliable contractor for your digital projects.
An astrology portal burcler com az with daily horoscopes, natal charts, and forecasts. Online consultations, zodiac sign compatibility, and personalized recommendations will help you better understand yourself and make important decisions.
Использую рейтинги легальных казино перед тем, как начать играть. Это позволяет сразу выбрать надежную площадку. Понравилось, что есть реальные отзывы и оценки. Информация подана честно и без навязывания. Отличный помощник для игроков, казино с пополнением через сбп
Бесплатная консультация юриста по вопросам опеки и усыновления поможет разобраться в правах, подготовке документов и порядке оформления. Переходите по запросу юридическая консультация по вопросам усыновления – специалист подскажет, как действовать в вашей ситуации, оценит риски и предложит оптимальное решение. Получите профессиональную помощь по делам опеки и попечительства на каждом шаге без лишних затрат.
Все новостройки https://tut-novostroyki.ru от застройщиков в Новосибирске — актуальный каталог квартир в новых ЖК. Цены, планировки, сроки сдачи и акции. Подберите квартиру напрямую от застройщика без комиссии с удобным поиском и проверенной информацией.
Шпаклевка стен https://shpaklevka-sten.ru и потолков в Москве — выравнивание поверхностей под покраску и обои. Качественные материалы, опытные мастера и соблюдение технологий. Выполняем работы быстро, аккуратно и с гарантией результата по доступной цене.
Автомобільний портал https://avtogid.in.ua новини авто, огляди, тести та поради водіям. Дізнавайтесь про нові моделі, технології, ремонт і обслуговування. Все про автомобілі в одному місці для власників і автолюбителів.
Сайт міста Житомир https://faine-misto.zt.ua новини, події, афіша та довідник компаній. Актуальна інформація про життя міста, транспорт, послуги і заклади. Усе необхідне для мешканців і гостей Житомира в одному зручному онлайн-порталі.
Блог Києва https://infosite.kyiv.ua події, новини, цікаві місця та корисні поради для мешканців і гостей столиці. Дізнавайтесь про актуальні заходи, життя міста, розваги та сервіси. Все найцікавіше про Київ в одному зручному онлайн-блозі.
У місті Одеса https://u-misti.odesa.ua актуальні новини, події, афіша та корисна інформація для мешканців і гостей. Дізнавайтесь про життя міста, транспорт, заклади і послуги. Все найважливіше про Одесу в одному зручному онлайн-порталі.
Хмельницький онлайн https://u-misti.khmelnytskyi.ua міський портал з новинами, афішею та довідником. Дізнавайтесь про події, транспорт, бізнес і послуги. Усе для комфортного життя та відпочинку в Хмельницькому в одному місці.
Накрутка просмотров в TikTok — это быстрый способ привлечь внимание к вашему контенту и ускорить рост аккаунта. Переходите по запросу просмотры тик ток купить и величьте показатели популярности, повысьте доверие аудитории и попадите в рекомендации. Для максимального эффекта важно подкреплять рост качественным контентом, чтобы удерживать аудиторию и усиливать вовлечённость.
У місті Львів https://u-misti.lviv.ua актуальні новини, події, афіша та корисна інформація для мешканців і гостей. Дізнавайтесь про життя міста, транспорт, заклади і послуги. Все найважливіше про Львів в одному зручному онлайн-порталі.
У місті Вінниця https://u-misti.vinnica.ua новини, афіша заходів, довідник закладів і корисні сервіси. Дізнавайтесь про події, відкривайте нові місця і плануйте свій час у Вінниці легко та зручно.
Київ онлайн https://u-misti.kyiv.ua міський портал з новинами, афішею та довідником. Дізнавайтесь про події, транспорт, бізнес і послуги. Усе для комфортного життя та відпочинку в Києві в одному місці.
Міський сайт Дніпра https://u-misti.dp.ua новини, події, оголошення і довідник організацій. Зручний пошук послуг, закладів і маршрутів. Будьте в курсі життя міста та знаходьте потрібну інформацію швидко.
Міський сайт Черкас https://u-misti.cherkasy.ua новини, події, оголошення і довідник організацій. Зручний пошук послуг, закладів і маршрутів. Будьте в курсі життя міста та знаходьте потрібну інформацію швидко.
Все самое свежее здесь: https://novostroi-tour.ru
Услуга накрутки просмотров на канал YouTube поможет быстро увеличить активность под вашими видео и привлечь внимание аудитории. Переходите по запросу как увеличить просмотры в ютубе Кворк. Дополнительные просмотры повышают видимость роликов в рекомендациях, улучшают статистику канала и создают эффект популярности. Подходит для продвижения новых и существующих видео, увеличения охвата и ускоренного роста канала на YouTube.
Только лучшие материалы: https://vnutridoma-spb.ru
Все лучшее здесь: https://proecostroj.ru
дизайн интерьера квартиры в цвете дизайн квартиры
купить в москве цветы недорого http://dostavka-cvetov-moskva495.ru .
Are you into rafting? rafting in montenegro on the tara river exciting rafting trips down mountain rivers with experienced instructors. A tour of the Tara Canyon offers scenic routes, safety, and unforgettable experiences. Book a rafting tour and discover an active holiday.
Nowoczesny sufit napinany odświeża mieszkanie. Taki wybór ukrywa nierówności stropu i poprawia estetykę. Dostępne są warianty PVC oraz tkaninowe, co sprawia że przestrzeń prezentuje się lekko https://sufity-napinane-wroclaw.pl/
Zahnprobleme? dentaltourismus in Montenegro zahnbehandlung im Ausland mit bis zu 70 % Ersparnis. Implantate, Zahnersatz, asthetische Zahnheilkunde und Diagnostik in modernen Kliniken. Wir unterstutzen Sie bei der Wahl des Landes und der Klinik und organisieren Ihre Reise von A bis Z.
Маркетплейс 1С-Битрикс — это официальный каталог готовых решений, модулей и интеграций для сайтов на платформе Bitrix. Переходите по запросу магазин расширений Битрикс и вы найдете расширения для интернет-магазинов, CRM, SEO, аналитики, платежных систем и автоматизации бизнеса. Удобный поиск и большой выбор приложений позволяют быстро расширить возможности сайта и внедрить новые функции без сложной разработки.
металлический значок пин изготовление металлических значков на заказ в москве
заказать металлический значок изготовление железных значков
значок металлический цена https://izgotovlenie-znachkov-moskva.ru/
цветы доставка москва недорого и красиво dostavka-cvetov-moskva495.ru .
металлический закатный значок изготовление металлических значков на заказ в москве
Лучшие порносайты предлагают высококачественный контент для
взрослых развлечений. Выбирайте
надежные хабы для безопасного и приятного просмотра.
my webpage :: Buy Rivotril
печать металлических значков заказ значков из металла со своим дизайном москва
циклевка паркета болгаркой циклевка старого паркета
mostbet app download https://www.mostbet73618.help
Старый паркет? шлифовка паркета в спб профессиональное восстановление деревянного пола без пыли и лишних затрат. Удаляем царапины, потемнения и старое покрытие, возвращаем гладкость и естественный цвет. Используем современное оборудование, выполняем циклевку, шлифовку и лакировку паркета под ключ с гарантией качества и точным соблюдением сроков.
Ищете надежные лицензии для 1С-Битрикс? Мы предлагаем легальные решения для всех типов проектов: интернет-магазинов, корпоративных сайтов и порталов. Переходите по запросу 1С Битрикс cms цена. Быстрая активация, официальная поддержка и выгодные условия – обеспечьте своему веб-проекту стабильную работу и защиту с надежным ПО уже сегодня!
Старый паркет? шлифовка паркета в спб профессиональное восстановление деревянного пола без пыли и лишних затрат. Удаляем царапины, потемнения и старое покрытие, возвращаем гладкость и естественный цвет. Используем современное оборудование, выполняем циклевку, шлифовку и лакировку паркета под ключ с гарантией качества и точным соблюдением сроков.
покупка цветов http://www.cvejie-cveti.ru .
The best of the best: https://cfppa-forestiers.fr/better-on-line-blackjack-gambling-enterprises-in-the-2026/
цветы с самовывозом http://www.cvejie-cveti.ru .
Recommended reading: https://rubisplaza.rw/?p=39872
служба доставки цветов москва http://www.cvejie-cveti.ru/ .
Лицензия «Битрикс: Управление сайтом – Старт» — оптимальное решение для создания небольшого сайта, лендинга или корпоративной страницы. Переходите по запросу 1C Битрикс Старт. Редакция включает базовые инструменты для управления контентом, готовые модули, защиту сайта и удобную административную панель. Подходит для быстрого запуска проекта на CMS 1C-Битрикс с возможностью дальнейшего масштабирования и перехода на более функциональные редакции.
Dive Deeper: https://macscologistics.com/bronx-cops-suspended-to-possess-presumably-having-sexual-intercourse-inside-station-home-locker-room-once-movies-away-from-steamy-tryst-taken-to-precinct/
доставить цветы в москве cvejie-cveti.ru .
1C-Bitrix: Управление сайтом — редакция Стандарт — это мощная платформа для создания и управления корпоративными сайтами. Переходите по запросу лицензия Bitrix Стандарт. Подходит для компаний, которым нужен функциональный сайт с каталогом, формами, SEO-инструментами и удобной системой администрирования. Решение обеспечивает высокую безопасность, производительность и гибкость масштабирования бизнеса в интернете.
цветы с доставкой по москве недорого https://cvejie-cveti.ru .
PUPIL OF FATE MOTORS https://auto.ae/pupiloffatemotors автосалон премиум авто в Дубае. Продажа роскошных автомобилей, эксклюзивные модели и индивидуальный подбор. Помогаем выбрать, оформить и доставить авто с гарантией качества и высоким уровнем сервиса.
Эко-бытовая химия http://reporter63.ru/content/view/784903/himiya-dlya-uborki-sekrety-effektivnosti-i-bezopasnosti в Санкт-Петербурге — средства для уборки без вредных компонентов. Эффективная очистка, безопасность для здоровья и окружающей среды. Широкий ассортимент и доставка по городу.
Только лучшие материалы: https://mal-paris.ru/products/miss-selene-5ml/
Modern ground fault sensor monitor the condition of electrical networks and protect equipment. They offer rapid fault detection, high accuracy, and reliability for industrial applications.
lengvi pyragu receptai
Битрикс: Управление сайтом Малый Бизнес — функциональная редакция CMS для создания интернет-магазинов и коммерческих проектов. Переходите по запросу 1С Битрикс Малый Бизнес ограничения. Система включает каталог товаров, корзину, онлайн-оплаты, маркетинговые инструменты и интеграцию с 1С. Решение подходит для компаний, которым нужен надежный и масштабируемый сайт с возможностью расширения функционала через модули и интеграции.
Больше на нашем сайте: циклевка паркета без пыли спб
Последние изменения: цены шлифовка лак паркета
Лучшее прямо здесь: шлифовка паркета
Нужны подписчики в Telegram? Поможем быстро увеличить аудиторию вашего канала или группы. Переходите по запросу инвайт подписчиков в телеграм. Предлагаем накрутку живых и активных подписчиков без резких скачков и с минимальными списаниями. Подходит для старта новых каналов, повышения доверия и привлечения органической аудитории. Безопасное продвижение, гибкие объемы заказа и быстрый запуск. Увеличьте популярность вашего Telegram-канала уже сегодня.
Самые актуальный новости свежие новости — свежие события, аналитика и репортажи. Политика, экономика, технологии и общество. Будьте в курсе последних новостей и ключевых событий каждый день.
Estetyczny sufit napinany nadaje wnętrzu lekkości. Taki wybór ukrywa nierówności stropu i poprawia estetykę. Sufit można połączyć z nową aranżacją lub remontem, dlatego wiele osób decyduje się na taki montaż https://sufity-napinane-wroclaw.pl/
бонусы jetton промокод
Специалисты компании выполнят изготовление этикеток любого формата и сложности: тканых жаккардовых, деревянных, металлических, кожаных и проч.
Чтобы этикетки для одежды не утратили своего первоначального вида и были износостойкими, мы используем только качественные материалы.
order diazepam
Выбор элитной парфюмерии онлайн открывает доступ к редким ароматам и ограниченным коллекциям. Это отличный способ найти что то по настоящему уникальное https://avon-forum.ru/
Нужна бесплатная юридическая консультация? Переходите по запросу вопрос юристу круглосуточно в Санкт-Петербурге и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
visit homepage now – It has a friendly charm that makes going through it enjoyable.
https://molitvy.guru/
какие цветы самые дешевые https://www.cveti-nederogo.ru .
Stackshine Get Started simplifies SaaS spend management with full software visibility, renewal tracking, and employee offboarding automation. Reduce costs, eliminate unused tools, and gain control over subscriptions with a smarter, centralized platform.
Профессиональная: оклейка авто виниловой пленкой – сохраните родное лакокрасочное покрытие в идеальном состоянии на долгие годы.
Играешь на гитаре? песни на гитаре аккорды для начинающих большая база аккордов, табулатур и разборов песен. Удобный поиск, схемы аккордов и тексты популярных композиций. Подходит для новичков и опытных гитаристов для обучения и игры.
Накрутка поведенческих факторов используется для увеличения пользовательской активности на сайте. Увеличение времени просмотра и глубины переходов формирует положительные сигналы для поисковых алгоритмов – накрутка переходов
Нужен займ? взять онлайн займ взять деньги быстро и без справок. Удобное оформление заявки, быстрые выплаты и минимальные требования. Подберите надежную МФО и получите деньги на карту в короткие сроки.
займ без отказа https://tvojbank.ru
Надёжный поставщик масло оптом цена предлагает моторные масла в бочках 200л от ведущих производителей.
Tarot readings tarot.com.az articles on card meanings, love readings, and daily predictions. Learn how to correctly perform readings and interpret the cards to get accurate answers.
Нужна бесплатная юридическая консультация? Переходите по запросу юридическая помощь 24 часа в Балашихе и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
самые дешевые букеты http://www.cveti-nederogo.ru/ .
Создать музыку нейросетью онлайн – https://vc.ru/aihub/2842557-sozdanie-muzyki-neyrosetyu-onlayn-luchshie-servisy-i-sovety
Нужна бесплатная юридическая консультация? Переходите по запросу юрист по интернету в Подмосковье и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
pin-up casino зеркало pinup
pin up вход казино пин-ап
Создать открытку нейросетью онлайн бесплатно. Здесь можно ознакомиться подробнее https://vc.ru/aihub/2842606-sozdanie-otkrytki-neurosetyu-onlajn-besplatno
смотреть новинки кино 2026 смотреть фильмы
pin up онлайн казино pin up скачать
дизайн интерьера комнаты https://center-bereg.ru/vybor-dizajnera-interera-v-spb-ot-poiska-speczialista-do-analiza-dokumentov.html
промокод алиэкспресс на все товары промокоды алиэкспресс 2026
Нужна бесплатная юридическая консультация? Переходите по запросу задать вопрос юристу круглосуточно в Подольске и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Лучшие бесплатные нейросети 2026, https://vc.ru/aihub/2842546-luchshie-besplatnye-neyroseti-2026-goda
смотреть лучшие фильмы 2025 киного онлайн
Volvo в Україні https://spectehnika-volvo.mystrikingly.com/ екскаватори, фронтальні навантажувачі та дорожні машини. Надійність, ефективність і сучасні рішення для будівництва. Продаж, підбір і обслуговування техніки для бізнесу.
Volvo спецтехніка https://volvo-2026.carrd.co/ екскаватори, фронтальні навантажувачі та дорожні машини. Надійність, ефективність і сучасні рішення для будівництва. Продаж, підбір і обслуговування техніки для бізнесу.
pin up casino вход https://mybiz04.ru
https://compact-houses.ru/
Узнайте больше по ссылке: генерация изображений на основе существующих
Видео для взрослых можно транслировать на надежных платформах для
обеспечения конфиденциальности.
Откройте для себя надежные хабы для взрослых для качественного просмотра.
my web blog – Buy Rivotril
https://compact-houses.ru/
Нужна бесплатная юридическая консультация? Переходите по запросу номер телефона бесплатной юридической помощи в Химках и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Доставка цветов https://kvarz-shop.ru авторские букеты и редкие композиции с быстрой доставкой. Премиальные цветы, индивидуальный подход и стильное оформление. Закажите уникальный букет для особого случая с гарантией свежести.
see more details – Had a quick browse, everything seems clearly presented.
доставка цветов быстро https://dostavka-cvetov777.ru .
Нужны заклепки? заклепки нержавеющие вытяжные купить 6мм прочный крепеж для соединения деталей. Алюминиевые, стальные и нержавеющие варианты. Надежность, долговечность и удобство монтажа для различных задач и конструкций.
Капсульный дом оказался отличным решением для небольшого участка. Пространство организовано очень грамотно, ничего лишнего нет. Несмотря на компактность, внутри комфортно и уютно. Установка прошла быстро и без сложностей. Материалы качественные, все выглядит современно. Отличный вариант для дачи: https://super-domiki.ru/
Нужны заклепки? заклепки вытяжные алюминиевые 4.8 мм прочный крепеж для соединения деталей. Алюминиевые, стальные и нержавеющие варианты. Надежность, долговечность и удобство монтажа для различных задач и конструкций.
Best selection of the day: https://levelhiring.com/bf-sex-video-private-onlyfans-manager-leonid-radvinsky-passed-away-months-just-before-personal-found-out-buddy/
Услуга по увеличению показателей в Дзене: подписчики, дочитки и лайки для роста активности и видимости канала. Переходите по запросу раскрутка яндекс дзен. Поможем быстро усилить социальные сигналы, повысить привлекательность публикаций и ускорить продвижение. Подходит для новых и действующих каналов, чтобы улучшить статистику и привлечь больше реальной аудитории.
Нужны заклепки? вытяжные заклепки из нержавейки купить прочный крепеж для соединения деталей. Алюминиевые, стальные и нержавеющие варианты. Надежность, долговечность и удобство монтажа для различных задач и конструкций.
The best is in one place: https://echtmuse.com/exploring-the-earthly-concern-of-xxx-porn-navigating-content-trends-and-bear-upon/
Stackshine en.stackshine.io a SaaS cost management platform: subscription control, usage transparency, renewal tracking, and employee offboarding. Optimize your budget and reduce unnecessary software costs.
Quick reference webemoji.org for emoji meanings helps you understand any symbol or combination in seconds.
Уничтожение вредителей https://dezinfekciya-mcd.ru/ уничтожение бактерий, вирусов и насекомых. Обработка квартир, домов и коммерческих помещений. Безопасные препараты, опытные специалисты и гарантия результата.
Free online games https://poki.com.az play without downloading or registering. A large collection of games across various genres: action, puzzles, racing, and strategy. Easily access from any device.
Arizona sports events https://oxu-az.com.az football, transfers, and live match results. Latest news, statistics, and reviews for fans and sports enthusiasts.
Free online games https://www.1001-oyun.com.az the best browser games with no installation required. Huge selection of genres, easy search, and quick launch. Play anytime for free.
Roblox Download delta-roblox.com.az Download the game, learn about Roblox Studio features, and learn about security settings. Play, create your own worlds, and protect your account. A complete guide to installing, playing, and using the platform safely.
Выгодно купить кварцевый песок для пескоструйки – 100% очистка без забитых сопел! Забудьте о засорах: очищайте металл в разы быстрее. Ваш аппарат скажет спасибо, а результат поразит клиента. Купить кварцевый песок!
База сайтов для Xrumer — это тщательно отобранный список площадок для эффективного размещения ссылок и автоматического постинга. Переходите по запросу база ссылок xrumer для постинга. База подходит для SEO-продвижения, ускоряет наращивание ссылочной массы и экономит время. Актуальные и рабочие ресурсы, регулярное обновление и высокая проходимость обеспечивают максимальный результат.
покупка курсовой покупка курсовой .
ремонт мембранной кровли https://remont-membrannoj-krovli-1.ru
шумоизоляция автомобиля https://shumoizolyaciya-avtomobilya-1.ru
Федеральный центр банкротства граждан помогает законно списать долги и начать финансовую жизнь с чистого листа. Переходите по запросу центр банкротства населения в Москве. Специалисты сопровождают процедуру на всех этапах: от консультации до полного завершения дела. Индивидуальный подход, прозрачные условия и защита ваших интересов — надежное решение при сложной финансовой ситуации.
Только свежие актуальные новости свежие новости политики, экономики, общества и технологий. Актуальные события, аналитика, обзоры и мнения экспертов. Следите за главными новостями страны и мира онлайн в удобном формате каждый день.
Монтажные работы https://montazhstroy.su услуги по установке инженерных систем и конструкций. Быстро, качественно и с гарантией. Выполняем задачи любой сложности для частных и коммерческих объектов.
склад ответственного хранения сколько стоит ответственное хранение
Видео для взрослых можно транслировать на надежных платформах для обеспечения конфиденциальности.
Откройте для себя гарантированные
источники видео для качественного просмотра.
my web-site … Купить Ривотрил
дизайн квартир дизайн интерьера квартиры бизнес класса
интерьер квартиры под ключ сделать дизайн интерьера квартиры
Ищете надежную юридическую помощь? Рейтинг лучших юристов поможет быстро найти проверенных специалистов с высоким уровнем экспертизы и успешной практикой. Переходите по запросу список лучших юристов. В подборке — профессионалы, которым доверяют клиенты, с реальными отзывами и подтвержденной репутацией. Выбирайте юриста для решения любых правовых вопросов уверенно и без лишних рисков.
промокод selector gg
Искал место, где можно купить телефон без лишних переживаний. Здесь всё оказалось именно так, как хотелось: профессиональная консультация, честная информация и быстрая доставка. Смартфон пришёл новый, без дефектов и с полной комплектацией. Магазин внушает доверие – телефонах
Complete insomnia treatment guide — understand causes, manage symptoms, and explore solutions. From lifestyle changes to therapies, learn how to achieve deep, restful sleep and improve daily performance.
шумоизоляция автомобиля Москва https://shumoizolyaciya-avtomobilya-moskva-1.ru
Срочные займы без отказа на https://credit-world.ru – это удобный способ быстро получить деньги без лишних проверок и сложных условий. На сайте представлено более 50 МФО, где реально оформить займ даже при нестандартной ситуации. Вы можете сравнить предложения, выбрать оптимальные условия и оформить займ онлайн быстро, и узнать результат в кратчайшие сроки.
Универсальный флагманский безбумажный регистратор jumo logoscreen 700 для контроля температуры, давления и других технологических параметров. Удобный интерфейс, точные измерения и возможность интеграции в системы мониторинга.
Нужен промокод? https://prazdnikvrn.ru актуальные бонусы, скидки и акции для пользователей. Используйте рабочие коды, получайте дополнительные преимущества и экономьте при использовании сервиса. Все свежие предложения в одном месте.
Нужна брендированная продукция? https://2ymedia.kz/category/futbolki-1/ ваш надежный партнер в сфере брендинга в Алматы. Мы специализируемся на производстве сувенирной продукции с нанесением логотипа и корпоративной полиграфии. В нашем каталоге вы найдете всё для продвижения бренда: бизнес-сувениры, промо-мерч, текстиль и полиграфическую продукцию. Мы принимаем заказы оптом от 50 единиц, что делает нас доступными как для крупного бизнеса, так и для небольших компаний.
сувениры с логотипом компании сувениры с логотипом компании .
Гранитные памятники https://allgranit.ru от производителя в Москве: надёжность и красота на века. Компания Allgranit предлагает гранитные памятники напрямую от производителя — без посредников, переплат и долгих ожиданий. Мы создаём мемориалы, которые сохраняют память о дорогих людях на долгие годы.
Нужен ремонт? профессиональный ремонт жилья под ключ, быстро и качественно. Дизайн, отделка, электрика и сантехника. Гарантия на работы и прозрачная смета. Выполняем проекты любой сложности.
Сопровождение банкротства физических лиц — это комплексная юридическая помощь при списании долгов. Переходите по запросу сопровождение процедуры банкротства. Специалист проанализирует ситуацию, подготовит документы, взаимодействует с судом и кредиторами, проконтролирует каждый этап процедуры. Вы снижаете риски ошибок, экономите время и получаете законное освобождение от долгов с защитой своих прав и имущества.
Проблемы с алкоголем? https://www.narkolog-na-dom-vizov.ru срочная помощь при алкогольной и наркотической интоксикации. Вывод из запоя, капельницы и поддержка 24/7. Анонимно, быстро и безопасно с выездом врача на дом.
Выгодные условия моторное масло оптом от производителя на закупку масел и смазок оптом для промышленных предприятий.
Do you trade cryptocurrencies? smart crypto trading bitkelttrade automate your transactions and earn passive income. Smart algorithms analyze the market and help you make decisions. Increase your income and reduce risks with modern technology.
https://telegramushka.ru/forum/topic/holodilnye-masla/#postid-3098 холодильные масла
вывод из запоя капельница екатеринбург vyvod-iz-zapoya-na-domu-ekaterinburg.ru .
Дистанционное банкротство физического лица — это удобный способ списать долги без личных визитов в суд и офисы. Переходите по запросу юристы по дистанционному банкротству физических лиц в Москве. Все этапы проходят онлайн: от консультации до подачи документов и сопровождения дела. Вы экономите время, снижаете стресс и получаете профессиональную поддержку юриста на каждом этапе. Поможем законно избавиться от долгов и начать финансовую жизнь с чистого листа.
ГНБ бурение https://stroytex.su современный способ прокладки инженерных сетей без раскопок. Подходит для дорог, рек и плотной застройки. Точная технология, сокращение сроков и минимальные затраты.
вывод из запоя круглосуточно вывод из запоя круглосуточно .
https://mhp.ooo/brands/jasgurlifesciences
Top adult platforms provide premium content for mature audiences.
Explore trusted sources for quality and privacy.
Also visit my website: BUY CANNABIS ONLINE
печать флага на заказ спб https://flag-zakaz-spb.ru
вывод из запоя на дому круглосуточно вывод из запоя на дому круглосуточно .
вывод из запоя спб вывод из запоя спб .
Услуги финансового управляющего — ключевой элемент процедуры банкротства физических лиц. Переходите по запросу сайт финансовых управляющих. Специалист сопровождает процесс на всех этапах: анализирует финансовое положение, взаимодействует с кредиторами, контролирует имущество и обеспечивает соблюдение закона. Профессиональная помощь помогает снизить риски, защитить интересы должника и пройти процедуру максимально эффективно.
круглосуточный вывод из запоя круглосуточный вывод из запоя .
Хочешь оригинальную подушку? заказать подушку дакимакура комфорт и уют для сна. Длинная форма, мягкий наполнитель и стильные принты. Отлично подходит для отдыха и расслабления.
вывод из запоя капельница воронеж вывод из запоя капельница воронеж .
Нужна мебель? мебель премиум сегмента эксклюзивные изделия из натурального дерева. Индивидуальный дизайн, качественные материалы и точное изготовление. Решения для дома и бизнеса.
Нужна премиум мебель? мебель из массива каталог цены изготовление на заказ. Натуральные материалы, эксклюзивный дизайн и долговечность. Решения для дома и бизнеса с высоким уровнем качества.
testosterone steroids for sale
References:
https://leonard-rafn-3.mdwrite.net/buy-testosterone-cream-for-men-online
Медицинский портал https://med-portal-24.ru актуальная информация о здоровье, заболеваниях и методах лечения. Симптомы, диагностика, профилактика и советы специалистов для поддержания здоровья.
Мир Labubu https://labubu-world.ru коллекционные фигурки, персонажи и новинки популярной серии. Узнайте о героях, редких выпусках и особенностях коллекции. Погружайтесь в атмосферу Labubu и следите за обновлениями.
Доска объявлений https://oren-i.ru удобный сервис для размещения и поиска объявлений. Продажа, покупка, услуги и работа. Быстро публикуйте объявления и находите нужные предложения в вашем городе.
Инженерные изыскания https://sever-geo.com для строительства в Твери — геология, геодезия и экология участка. Комплексные исследования для проектирования и строительства. Точные данные, соблюдение норм и оперативные сроки выполнения.
Разработка сайтов https://domenanet.online на Laravel — современные веб-проекты с высокой скоростью и безопасностью. Индивидуальные решения, интеграции и масштабируемая архитектура для бизнеса любого уровня.
Откровенные видео можно транслировать на
надежных платформах для
обеспечения конфиденциальности.
Откройте для себя гарантированные источники видео для качественного просмотра.
Here is my site; BUY VALIUM ONLINE
Солянка Парк https://tzstroy.su жилой комплекс с современными квартирами и удобной инфраструктурой. Отличный выбор для жизни с комфортом и доступом ко всем необходимым объектам.
Online football match statistics https://www.soccer-stand.com.az live scores, events, and live broadcasts. Follow games in real time, analyze teams, and never miss a beat.
All live match results http://www.live-score.com.az game information and data from the leading football leagues on one site. Up-to-date scores, statistics, and events for easy tracking.
Очень удобный сервис для покупки телефона онлайн. На сайте легко найти нужную модель, а после заказа сотрудники быстро выходят на связь. Доставка аккуратная и без задержек, сам смартфон полностью соответствует ожиданиям. Хороший магазин для спокойной покупки – рестор 77 магазин интернет
The site http://www.play-mods.com.az/ contains information about downloading PlayMods, downloading PlayMods APK files, compatibility with iOS, Android, and PC, as well as basic information about GTA San Andreas and other modified games.
Live football http://www.qolvar.com.az/ broadcasts, daily game streams, football news, and the most popular live streaming sections.
Нужен ремонт электродвигателя? услуга ремонт электродвигателей срочный ремонт и перемотка в Алматы от ПрофЭлектроРемонт-1: диагностика, восстановление и запуск в минимальные сроки, чтобы ваше производство не простаивало. Опытные мастера, гарантия результата и использование качественных материалов — надежность, которой можно доверять.
Today’s horoscope https://t.me/s/ulduz_fali daily forecasts and life surprises for all zodiac signs. Love, career, finances, and mood. Discover the future every day.
Реальные 1win отзывы игроков — честные мнения о работе сервиса. Узнайте о ставках, бонусах, выводе средств и надежности платформы.
Честные 1win отзывы — плюсы и минусы сервиса, опыт пользователей и оценки. Информация о выплатах, бонусах и удобстве использования платформы.
Настоящие 1win отзывы — опыт пользователей, выплаты, бонусы и работа сервиса. Полезная информация перед началом использования платформы.
наркология вывод из запоя в стационаре наркология вывод из запоя в стационаре .
Юрист по делам несовершеннолетних оказывает квалифицированную правовую помощь детям и их законным представителям. Переходите по запросу юрист по правам несовершеннолетних граждан. Специалист защитит права ребёнка в судах и государственных органах, решит вопросы опеки, споры в семейных и уголовных делах. Консультации помогают быстро разобраться в ситуации и выбрать правильную стратегию защиты интересов несовершеннолетнего.
казино фреш фильм казино
Подробности по ссылке: https://parfumabc.ru/parfum/antonio-puig/
мебель премиум сегмента производство мебели на заказ
Актуальні новини https://lentalife.com поради та історії з усього світу. Дізнавайтеся про події, тренди й корисні лайфхаки, щоб залишатися в курсі та робити життя простішим і зручнішим щодня.
Авто портал https://tvregion.com.ua новости, обзоры и тест-драйвы автомобилей. Актуальная информация о новых моделях, технологиях и рынке. Узнавайте все о машинах и выбирайте авто с удобным сервисом.
Авто портал https://autoguide.kyiv.ua свежие новости, обзоры и тест-драйвы. Рейтинги автомобилей, советы по выбору и актуальные предложения. Все о мире авто в одном месте.
Авто журнал https://psncodegeneratormiu.org новости, обзоры и тест-драйвы автомобилей. Узнавайте о новых моделях, технологиях и рынке. Полезные советы, рейтинги и аналитика для автолюбителей.
Авто журнал https://nmiu.org.ua свежие автомобильные новости, тесты и обзоры. Рейтинги, сравнения и рекомендации по выбору авто. Все о мире автомобилей в одном месте.
Авто портал https://retell.info обзоры автомобилей, тест-драйвы и новости рынка. Сравнения моделей, рейтинги и советы по выбору авто для любых задач.
Авто журнал https://bestauto.kyiv.ua тест-драйвы, обзоры и новости автоиндустрии. Узнавайте о новинках, технологиях и трендах рынка. Удобный формат для чтения каждый день.
modern villa for sale dubai
Онлайн авто журнал https://simpsonsua.com.ua новости, обзоры и тест-драйвы автомобилей. Актуальная информация о рынке и новых моделях для автолюбителей.
Авто портал https://nerjalivingspace.com автомобильные новости, тест-драйвы и обзоры. Узнавайте о новинках, технологиях и тенденциях рынка. Удобный сервис для автолюбителей.
Читать расширенную версию: https://giasite.ru
Лучший выбор дня: https://trafficforsimilarweb.com
Женский портал https://lubimoy.com.ua статьи о красоте, здоровье, отношениях и саморазвитии. Полезные советы, лайфхаки и актуальные темы для женщин. Все для вдохновения и гармонии каждый день.
Удобный строительный https://anti-orange.com.ua портал с полезной информацией для частных застройщиков и профессионалов. Обзоры, инструкции, идеи для ремонта, каталог услуг и материалов. Поможем спланировать проект, подобрать решения и реализовать строительство без лишних затрат.
Мужской портал https://swiss-watches.com.ua о стиле жизни, здоровье, финансах и саморазвитии. Полезные статьи, советы экспертов, идеи для карьеры и отдыха. Всё, что важно современному мужчине для уверенности, успеха и баланса в жизни.
Туристический портал https://swiss-watches.com.ua для путешественников: направления, маршруты, советы и лайфхаки. Подбор отелей, билетов и экскурсий, идеи для отдыха и полезные рекомендации. Планируйте поездки легко и открывайте новые страны с комфортом.
Онлайн женский портал https://sweaterok.com.ua мода, уход за собой, здоровье и отношения. Актуальные статьи, советы и идеи для вдохновения и улучшения качества жизни.
Современный строительный https://sinergibumn.com журнал: идеи, технологии, обзоры и советы экспертов. Помогаем разобраться в материалах, выбрать решения и реализовать проекты любой сложности — от квартиры до загородного дома.
Профессиональный строительный https://newhouse.kyiv.ua журнал с полезной информацией и практическими решениями. Аналитика рынка, обзоры материалов, инструкции и советы. Всё, что нужно для качественного строительства и ремонта.
Портал о дизайне https://lbook.com.ua интерьера: идеи, тренды и практические решения для дома и квартиры. Обзоры стилей, подбор мебели и материалов, советы дизайнеров. Помогаем создать уютное, функциональное и современное пространство.
Строительный портал https://comart.com.ua для тех, кто ценит качество и надежность. Полезные статьи, инструкции, сравнение материалов и услуг. Найдите проверенных специалистов, получите идеи для ремонта и реализуйте проекты любой сложности с максимальной выгодой.
Информационный строительный https://stroyportal.kyiv.ua журнал с экспертным контентом. Технологии, материалы, тренды и советы для частных и коммерческих проектов. Читайте, вдохновляйтесь и реализуйте идеи с уверенностью в результате.
Женский сайт https://biglib.com.ua мода, уход за собой, психология и здоровье. Актуальные темы, лайфхаки и рекомендации для улучшения качества жизни.
Строительный журнал https://ukrainianpages.com.ua с актуальными новостями, трендами и экспертными материалами. Обзоры технологий, советы по ремонту и строительству, идеи для дома и бизнеса. Узнавайте о современных решениях и применяйте лучшие практики в своих проектах.
Женский портал https://virginvirtual.net красота, здоровье, психология и стиль жизни. Полезные советы, тренды и рекомендации для женщин в одном месте.
Женский журнал https://vybir.kiev.ua статьи о моде, красоте, здоровье и отношениях. Актуальные тренды, советы экспертов и вдохновение для современной женщины каждый день.
Свежие новости https://hansaray.org.ua Украины: политика, экономика, общество и события дня. Оперативная информация, аналитика и мнения экспертов. Будьте в курсе главных новостей страны и мира в удобном формате.
Все о строительстве https://azst.com.ua и ремонте на одном портале: от выбора материалов до поиска исполнителей. Практические советы, тренды, технологии и реальные кейсы. Экономьте время и деньги, принимая грамотные решения для вашего дома или коммерческого объекта.
Сайт для женщин https://prowoman.kyiv.ua практичные советы по уходу за собой, здоровью и отношениям. Читайте, развивайтесь и улучшайте свою жизнь.
Все о здоровье https://mikstur.com на одном портале: болезни, симптомы, методы лечения и профилактика. Советы врачей, актуальные медицинские статьи и рекомендации. Помогаем лучше понимать организм и заботиться о своем самочувствии.
https://fiesta-new.ru/
Женский журнал https://womanclub.in.ua мода, уход за собой, психология и отношения. Читайте интересные статьи, находите идеи и улучшайте качество жизни.
Новости Украины https://status.net.ua сегодня: главные события, политика, экономика и общественная жизнь. Оперативные сводки, аналитика и комментарии. Узнавайте важное первыми и следите за развитием ситуации.
Все о строительстве https://skol.if.ua ремонте и отделке на одном сайте. Практические рекомендации, современные технологии, обзоры и каталог услуг. Найдите идеи, рассчитайте бюджет и воплотите проект любой сложности с минимальными рисками и затратами.
Портал о строительстве https://kennan.kiev.ua и ремонте: идеи, технологии, обзоры и советы экспертов. Помогаем выбрать материалы, рассчитать бюджет и найти исполнителей. Удобный сервис для планирования и реализации проектов — от квартиры до загородного дома.
капсульный дом капсульный дом .
Ищите откровенные видео, исследуя надежные платформы в Интернете.
Изучите защищенные источники контента для приватного
просмотра.
Feel free to visit my website :: buy valium online
Строительный журнал https://sota-servis.com.ua о ремонте, отделке и строительстве. Актуальные статьи, кейсы, лайфхаки и рекомендации специалистов. Будьте в курсе новинок и принимайте грамотные решения для своих проектов.
Строительный портал https://solution-ltd.com.ua с актуальной информацией и практическими решениями. Узнайте о новых технологиях, сравните материалы, получите советы и найдите специалистов. Сделайте ремонт или строительство проще, быстрее и выгоднее.
Онлайн журнал https://start.net.ua о строительстве, ремонте и дизайне. Разбор технологий, советы экспертов, обзоры материалов и реальные кейсы. Помогаем принимать грамотные решения и реализовывать проекты любой сложности без лишних затрат.
Лучший сайт для женщин https://musicbit.com.ua статьи о стиле, любви, здоровье и вдохновении. Найдите идеи для жизни и развития в одном месте.
Онлайн сайт для женщин https://elegance.kyiv.ua статьи о красоте, отношениях, семье и саморазвитии. Советы, идеи и вдохновение для повседневной жизни.
Женский сайт https://fashionadvice.kyiv.ua полезная информация о здоровье, стиле, любви и карьере. Читайте актуальные статьи и находите решения для жизни.
Сайт для женщин https://gracefullady.kyiv.ua все о моде, красоте, здоровье и отношениях. Практические советы, тренды и идеи для современной женщины.
Сайт для женщин https://bestwoman.kyiv.ua статьи о красоте, здоровье, отношениях и стиле жизни. Полезные советы, тренды и идеи для вдохновения. Все, что нужно современной женщине, в одном месте.
Строительный журнал https://tozak.org.ua с полезными статьями и актуальными обзорами. Освещаем современные технологии, материалы и тренды в строительстве и ремонте. Практические советы, идеи и решения для создания комфортного и надежного пространства.
Онлайн строительный https://reklama-region.com журнал для профессионалов и частных застройщиков. Полезные статьи, разборы материалов, новинки рынка и практические рекомендации. Все о строительстве, ремонте и дизайне в удобном формате.
Актуальные новости https://ktm.org.ua Украины онлайн. Последние события, аналитика, экономика, происшествия и международные отношения. Только проверенная информация и важные обновления в режиме реального времени.
Онлайн женский журнал https://zhenskiy.kyiv.ua статьи о красоте, здоровье, моде и любви. Советы, тренды и полезный контент для женщин любого возраста.
капсульный дом тесла капсульный дом тесла .
капсульный дом фото цена https://webproverka.com/index-articles.php?a_id=820 .
Here’s the thing about boosting services—they’re only effective when combined with genuinely engaging content, so make those visuals count and buy instagram likes and view wisely!
Лучшие профессии обучение помощник по уходу дистанционно москва возможность получить практические знания и освоить востребованные специальности в короткие сроки. Обучение подходит для тех, кто хочет начать карьеру или сменить сферу деятельности. Все материалы доступны онлайн и сопровождаются поддержкой преподавателей.
Нужен грузовик? дилер коммерческого транспорта москва компания «НЕО ТРАК» — это современный дилерский центр полного цикла, работающий на рынке коммерческого транспорта и спецтехники уже более 20 лет. Являясь официальным дилером ведущих производителей, таких как DONGFENG, JAC, FAW, DAEWOO TRUCKS, ISUZU, HYUNDAI и других, компания предлагает широкий выбор грузовых автомобилей различной тоннажности, спецтехники, от фургонов и бортовых платформ до эвакуаторов и крано-манипуляторных установок.
Google Ads bidding strategy effectiveness depends on understanding how machine learning interprets your conversion data and translates that into real-time bid decisions across millions of potential placements. https://npprteam.shop/en/articles/google/google-ads-roas-target-roas-bidding-strategy-guide/ breaks down the mechanics of ROAS bidding, common implementation mistakes, and the measurement frameworks that separate high-performing accounts from those struggling with inefficient spend. The resource covers foundational concepts like conversion value tracking setup, the transition from manual bidding to automated strategies, and how to diagnose underperformance when ROAS targets aren’t being met consistently. Whether you’re launching your first Target ROAS campaign or optimizing an existing strategy that’s plateaued, the tactical frameworks and diagnostic checklists provided here serve as a reference for troubleshooting bidding problems and scaling sustainably.
Learn how to leverage barter advertising on Instagram as a cost-effective strategy to build brand visibility when marketing budgets are limited or nonexistent. Barter arrangements allow brands to exchange products, services, or content access in place of monetary payments, creating mutually beneficial partnerships with creators and media outlets. The guide breaks down practical frameworks for identifying barter-ready partners, structuring fair value exchanges, and negotiating terms that protect both parties. Creators and small business owners frequently face the challenge of needing exposure but lacking funds to pay for traditional advertising placements. This approach opens doors to collaborations that would otherwise remain inaccessible, enabling brands to reach engaged audiences through authentic partnerships rather than paid media spend.
Искал место, где можно купить телефон без лишних переживаний. Здесь всё оказалось именно так, как хотелось: профессиональная консультация, честная информация и быстрая доставка. Смартфон пришёл новый, без дефектов и с полной комплектацией. Магазин внушает доверие: телефоны купить в москве
Калибровочные гири для весов нужного класса точности и номинальной массы для калибровки весов.
В нашей компании можно купить гири классов точности E1, E2, F1, F2, M1, M2.
Чем выше класс точности, тем меньше будет разница между номинальным и действительным значениями массы калибровочной гири.
мелбет регистрация официальный сайт мелбет регистрация официальный сайт .
New releases are here: https://sarapang.com
While reviewing multiple ecommerce UI mockups for usability testing and consistency I navigated a category interface containing a href=”//jewelbrooktradecollective.shop/](https://jewelbrooktradecollective.shop/)” />Trade Brook Jewel Collective Hub inside a sidebar module, – Everything is neatly arranged and feels comfortable to explore which helps maintain a smooth and distraction free navigation experience throughout
interesat de Gladiatus? https://jocgladiatus.top/ Creeaza un erou, lupta in arena, completeaza misiuni ?i imbunata?e?te-?i echipamentul. Alatura-te miilor de jucatori ?i devino un gladiator legendar in acest popular RPG bazat pe browser.
капельница от запоя в стационаре vyvod-iz-zapoya-v-staczionare-sankt-peterburg-8.ru .
Cel mai bun joc jocwow.top Un MMORPG legendar cu o lume deschisa vasta, unde te a?teapta batalii epice, progresul personajelor ?i misiuni palpitante. Exploreaza Azeroth, alatura-te breslelor ?i devino parte a unei pove?ti grandioase.
Iti place entuziasmul? https://jocuridenoroc.top/ Cazinouri online, case de pariuri ?i sali de jocuri de noroc licen?iate. Cele mai bune jocuri de noroc online.
References:
Gala casino bradford
References:
https://graph.org/Crown-Casino-Online-Complete-Player-Guide-04-20
References:
Crown-https://graph.org/skycrown-casino-australia-review-04-20-2-cashed-out
капитальный ремонт это реконструкция капитальный ремонт это реконструкция .
Порносайт предлагает широкий выбор видео
для взрослых развлечений. Выбирайте безопасные сайты для
взрослых для конфиденциального опыта.
my blog: купить виагру
Консультацию психолога https://психолог38.рф в Иркутске можно получить в центре Психолог38. Здесь работают высококвалифицированные специалисты: детские психологи, клинические, семейные и индивидуальные. Мы собрали профессионалов разных направлений, чтобы комплексно подходить к решению запросов клиентов. Бережно, деликатно, с научным подходом. Сложные ситуации в нашей жизни встречаются не редко, и своевременная помощь, поддержка очень важна. Находясь среди людей, легко можно оказаться в одиночестве, один на один со своими проблемами. Если вы ищите лучших психологов, которые реально помогают людям, обратите внимание на нашу организацию.
References:
Casinos en linea
References:
https://graph.org/Crown-Casino-Online-Complete-Player-Guide-04-20
Pour les amateurs de sensations, Les passionnes de casino consultent souvent https://hugo-bets-casino.blogspot.com/2026/04/les-tendances-actuelles-des-casinos-en.html pour jouer dans une ambiance moderne et efficace. Ici, le blackjack avance a bon rythme, et le jeu reste facile a suivre. Chaque partie garde un vrai esprit de casino.
ремонт бетонных конструкций ремонт бетонных конструкций .
Консультацию психолога https://психолог38.рф в Иркутске можно получить в центре Психолог38. Здесь работают высококвалифицированные специалисты: детские психологи, клинические, семейные и индивидуальные. Мы собрали профессионалов разных направлений, чтобы комплексно подходить к решению запросов клиентов. Бережно, деликатно, с научным подходом. Сложные ситуации в нашей жизни встречаются не редко, и своевременная помощь, поддержка очень важна. Находясь среди людей, легко можно оказаться в одиночестве, один на один со своими проблемами. Если вы ищите лучших психологов, которые реально помогают людям, обратите внимание на нашу организацию.
Покупка шаблона «Аспро Максимум» — быстрый способ запустить мощный интернет-магазин на 1С-Битрикс без долгой разработки. Переходите по запросу требования шаблона интернет-магазина Аспро Макс. Вы получите готовую структуру, адаптивный дизайн, продуманный каталог и встроенные инструменты для продаж и SEO. Решение легко настраивается под задачи бизнеса и помогает выйти на рынок в кратчайшие сроки.
Консультацию психолога https://психолог38.рф в Иркутске можно получить в центре Психолог38. Здесь работают высококвалифицированные специалисты: детские психологи, клинические, семейные и индивидуальные. Мы собрали профессионалов разных направлений, чтобы комплексно подходить к решению запросов клиентов. Бережно, деликатно, с научным подходом. Сложные ситуации в нашей жизни встречаются не редко, и своевременная помощь, поддержка очень важна. Находясь среди людей, легко можно оказаться в одиночестве, один на один со своими проблемами. Если вы ищите лучших психологов, которые реально помогают людям, обратите внимание на нашу организацию.
buy weed online uk
Консультацию психолога https://психолог38.рф в Иркутске можно получить в центре Психолог38. Здесь работают высококвалифицированные специалисты: детские психологи, клинические, семейные и индивидуальные. Мы собрали профессионалов разных направлений, чтобы комплексно подходить к решению запросов клиентов. Бережно, деликатно, с научным подходом. Сложные ситуации в нашей жизни встречаются не редко, и своевременная помощь, поддержка очень важна. Находясь среди людей, легко можно оказаться в одиночестве, один на один со своими проблемами. Если вы ищите лучших психологов, которые реально помогают людям, обратите внимание на нашу организацию.
ремонт бетонных конструкций договор remont-betona-3.ru .
gay sex porn
Как продвигать сайты https://vlcjq.ru/prodvizhenie-sajtov-seo-i-internet-marketing-v-2026-godu/
More on our website: https://sarapang.com
Консультацию психолога https://психолог38.рф в Иркутске можно получить в центре Психолог38. Здесь работают высококвалифицированные специалисты: детские психологи, клинические, семейные и индивидуальные. Мы собрали профессионалов разных направлений, чтобы комплексно подходить к решению запросов клиентов. Бережно, деликатно, с научным подходом. Сложные ситуации в нашей жизни встречаются не редко, и своевременная помощь, поддержка очень важна. Находясь среди людей, легко можно оказаться в одиночестве, один на один со своими проблемами. Если вы ищите лучших психологов, которые реально помогают людям, обратите внимание на нашу организацию.
1xbet yeni adresi nupel.net .
step daughter porn
Нужна градирня? https://gradirni.mystrikingly.com ключевой элемент системы охлаждения, позволяющий эффективно снижать температуру воды за счет теплообмена с воздухом. Применяется в промышленности, энергетике и на предприятиях. Обеспечивает стабильную и экономичную работу оборудования.
Нужна септик или погреб? септик для частного дома эффективное решение для автономной канализации. Системы обеспечивают качественную очистку сточных вод, устраняют запахи и безопасны для окружающей среды. Подходят для частных домов, коттеджей и загородных участков.
Franchement jai gagne cette ambiance dans bonus https://ralphouensanga.com/read-blog/99837 cest relax resultat mitige au debut
Женский журнал https://vybir.kiev.ua статьи о моде, красоте, здоровье и отношениях. Актуальные тренды, советы экспертов и вдохновение для современной женщины каждый день.
Все о здоровье https://mikstur.com на одном портале: болезни, симптомы, методы лечения и профилактика. Советы врачей, актуальные медицинские статьи и рекомендации. Помогаем лучше понимать организм и заботиться о своем самочувствии.
Сайт для женщин https://prowoman.kyiv.ua практичные советы по уходу за собой, здоровью и отношениям. Читайте, развивайтесь и улучшайте свою жизнь.
1xbet azeri 1xbet azeri .
Сайт для женщин https://gracefullady.kyiv.ua все о моде, красоте, здоровье и отношениях. Практические советы, тренды и идеи для современной женщины.
Лучший сайт для женщин https://musicbit.com.ua статьи о стиле, любви, здоровье и вдохновении. Найдите идеи для жизни и развития в одном месте.
Онлайн строительный https://reklama-region.com журнал для профессионалов и частных застройщиков. Полезные статьи, разборы материалов, новинки рынка и практические рекомендации. Все о строительстве, ремонте и дизайне в удобном формате.
Строительный журнал https://sota-servis.com.ua о ремонте, отделке и строительстве. Актуальные статьи, кейсы, лайфхаки и рекомендации специалистов. Будьте в курсе новинок и принимайте грамотные решения для своих проектов.
Сайт для женщин https://bestwoman.kyiv.ua статьи о красоте, здоровье, отношениях и стиле жизни. Полезные советы, тренды и идеи для вдохновения. Все, что нужно современной женщине, в одном месте.
карнизы для штор с электроприводом elektrokarniz11.ru .
Женский онлайн портал https://stepandstep.com.ua все о жизни, стиле и здоровье. Статьи о красоте, отношениях, семье и саморазвитии. Полезный контент для женщин любого возраста.
Женский журнал https://a-k-b.com.ua все о стиле, здоровье и отношениях. Практические советы, тренды и вдохновение для повседневной жизни.
Онлайн курсы рабочих https://obuchenie-rabochih.ru профессий — это быстрый старт в новой карьере. Практика, поддержка наставников и современные методики помогут вам освоить специальность и найти работу.
Аспро Премьер — современный шаблон для создания мощного интернет-магазина с продуманной структурой, высокой скоростью работы и широкими возможностями для продаж. Переходите по запросу шаблон Aspro Premier. Решение подходит для бизнеса любого масштаба, поддерживает адаптивный дизайн, удобный каталог, SEO-настройки и интеграции. Купить шаблон Аспро Премьер — значит получить надежную платформу для эффективного онлайн-бизнеса и быстрого запуска проекта.
Нужно масло или смазка? канатная смазка купить краснодар официальный дилер масел Devon и смазок Efele в Краснодаре предлагает широкий ассортимент продукции для промышленности и автосервиса. Гарантия качества, выгодные цены, быстрая доставка и профессиональная консультация по подбору.
Продажа стройматериалов https://mir-betona.od.ua в Одессе по доступным ценам. В наличии всё необходимое для ремонта и строительства: от базовых материалов до профессионального инструмента. Быстрая доставка и гарантия качества.
ParfumPlus https://parfumplus.ru это сервис доставки оригинальных духов по всей России. Мы помогаем удобно и безопасно заказать любимые ароматы, не рискуя столкнуться с подделками. В нашем каталоге представлен широчайший выбор женских и мужских духов, туалетной воды, нишевая и люксовая парфюмерия, популярные бестселлеры и новинки мировых брендов.
Do you need tree pruning? tree cutting services everett dead branch removal, crown shaping, and garden maintenance with a quality guarantee and compliance with all regulations.
Санкт-Петербургский Фестиваль https://tattoo-weekend.ru Татуировки — это встреча лучших тату-мастеров, конкурсы, шоу-программа и тысячи вдохновляющих идей. Отличный шанс познакомиться с трендами и найти своего мастера.
Посмотрите здесь https://happyholi.ru мебель на заказ. Качество супер, прайс адекватные, а сроки не затягивают. Нам понравилось.
капельница на дому скорая гемотест анализ крови на дом
Главные новости: specialities vsu
Security advancements protect users—best hookup sites continuously improve verification and safety features for all members.
Latest Liberian business news https://forbesliberia.com market analysis, economic trends, and technology developments. Learn about key events, investment opportunities, and business prospects in the country.
Expert construction https://trackbuilder.ru of BMX tracks, pump tracks, and dirt parks. High-quality materials, thoughtful design, and reliable implementation for sports, recreation, and competitions.
Фундамент под ключ https://fundament-v-spb.ru любой сложности: ленточный, плитный, свайный. Профессиональный подход, современные технологии и точный расчет для долговечности и безопасности здания.
На сайті 500pokupok.com зібрано багато статей із оглядами товарів, підбірками та рекомендаціями. Зручний ресурс для тих, хто хоче зробити правильний вибір перед покупкою.
портал новин inews.in.ua висвітлює події в Україні та світі, а також теми технологій. Тут можна знайти новини про гаджети, техніку, ІТ та актуальні тренди.
Чем корпоративный ВПН отличается от потребительского?
нейросеть пишет реферат нейросеть пишет реферат .
электрические карнизы для штор в москве электрические карнизы для штор в москве .
автоматические карнизы автоматические карнизы .
Хотите вложить деньги https://potokmedia.ru/737816/venchurnye-investicii-chto-eto-prostymi-slovami-i-kak-na-nih-zarabotat/ в стартапы на ранней стадии, но боитесь рисков? Простыми словами объясняем, что такое венчурные инвестиции и как на них заработать, не теряя все капиталы.
Свежие промокоды Пятёрочка https://tvoi-noski.ru/promokody-v-internet-magazinah-kak-nahodit-proveryat-i-ispolzovat/ получайте скидки, бонусные баллы и участвуйте в акциях. Подборка лучших предложений для выгодных покупок в магазине у дома.
Комплексное снабжение строек https://nerud23.ru нерудными материалами. Вы можете купить песок и щебень в Краснодаре с доставкой. Любые виды щебня, песок для бетона и засыпки. Свой парк самосвалов. Оперативная доставка в день заказа по звонку!
Покупка шаблона Аспро Next — готовое решение для быстрого запуска современного интернет-магазина на 1С-Битрикс. Переходите по запросу цена шаблона Aspro Next. Шаблон сочетает стильный дизайн, удобный каталог, адаптивную верстку и широкий набор маркетинговых инструментов для увеличения продаж. Подходит для разных ниш бизнеса, легко настраивается и интегрируется с необходимыми сервисами. Оптимальный выбор для тех, кто хочет запустить эффективный онлайн-магазин без лишних затрат времени.
Срочно нужны деньги? займ без выходных подайте заявку и получите деньги в кратчайшие сроки. Прозрачные условия, удобное погашение и круглосуточная подача заявки.
Кирпичный завод Иваново https://ivkirpich.ru производство качественного кирпича для строительства. Широкий ассортимент, современные технологии и надежные поставки для частных и коммерческих объектов.
Сейчас для медработников аккредитация сколько стоит предусмотрена в комфортном дистанционном формате в профильном институте. Если пришло время подтвердить квалификацию, подготовиться к аккредитации или разобраться с требованиями по документам, здесь можно все оформить без спешки и без сложностей. Программы выстроены так, чтобы действующим сотрудникам было реально совмещать обучение с работой, а все этапы сопровождались понятной поддержкой.
Хочешь продать монеты? Скупка антиквариата в Новосибирске профессиональная оценка, быстрый выкуп и надежные условия. Работаем с редкими, инвестиционными и антикварными монетами. Выплата сразу после согласования стоимости.
coworking space for individuals coworking cost
Женский журнал stepandstep.com.ua всё о красоте, моде, здоровье и отношениях. Практичные советы, тренды, лайфхаки и вдохновляющие истории для женщин, которые стремятся к лучшему каждый день
Premade Cover Art Album https://coverartplace.com marketplace offering professional Design Artwork, Cover Art, and Cover Track visuals created by independent graphic designers. Ideal for artists who need high-quality, ready-made covers for Spotify, Apple Music, and other streaming platforms.
ROI от публикаций в СМИ цены на публикации в СМИ 2026
Наша лучшая подборка: https://forum.i.ua/topic/27739
купить рулонные шторы москва купить рулонные шторы москва .
Полная статья здесь: https://www.realtycomfort.kiev.ua/forum/discussion/167403/remont-pralnih-mashin
Сегодня вашему бизнесу купить bpm систему помогает сделать понятную и эффективную работу команды без хаоса и бесконечных таблиц. На одной платформе удобно ставить задачи, видеть сроки выполнения, видеть движение средств, работать с сотрудниками и видеть полную картину бизнеса. Инструмент подойдет для малого бизнеса и активных команд, где нужны порядок и скорость решений. Компания растет быстрее, когда процессы работают четко.
сколько кадров в секунду может выдавать ноутбук и сколько fps будет в игре на нем
электрокарнизы для штор купить в москве электрокарнизы для штор купить в москве .
эвакуация авто эвакуатор по городу цена
эвакуатор на дороге эвакуатор по москве номер
Online car games http://www.masin-oyunlari.com.az racing, driving simulators, and 20+ games in one place. Get behind the wheel, navigate the tracks, and get the adrenaline rush without downloading.
Online football matches futbol oyunlari com az play football for free and without registration. Choose teams, participate in matches, and enjoy dynamic gameplay right in your browser without downloading.
References:
Casino canberra
References:
https://casino-online-games.online-spielhallen.de/
References:
Fiesta casino las vegas
References:
https://turning-stone-resort-casino.online-spielhallen.de/
Дома и коттеджи https://orionstroy.su под ключ в Москве: от проекта до готового жилья. Профессиональный подход, контроль качества и комфортные условия сотрудничества
Портал по инженерии https://build-industry.su и перепланировке: проекты, согласование, нормы и практические решения. Полезные статьи, сервисы и экспертиза для безопасного изменения планировок и внедрения инженерных систем
1xbet giri? yapam?yorum 1xbet-giris-69.com .
In the process of analyzing modern marketplace UX trends and curated shop websites, I came across a structured layout containing Upland Cove product showcase portal placed within a minimalist interface that enhances clarity – The experience feels organized, simple, and pleasantly intuitive for extended browsing sessions
Чаты строителей https://stroitelirussia.ru в России— официальный сайт для общения и обмена опытом. Объединяем строителей со всех регионов России, обсуждения, вакансии, советы и полезные контакты
Всё об отделке фасадов https://fasad-otkos.ru и установке панелей на одном сайте: обзоры материалов, методы монтажа, ошибки и рекомендации для качественного и долговечного результата
Many digital catalog websites aim to enhance user engagement by presenting structured information in visually balanced layouts designs Valecove Goods Room navigation hub – The browsing system appears thoughtfully arranged, enabling quick access to sections while keeping the overall experience consistent and easy to follow based on design feedback
1x bet 1x bet .
Строительный портал https://only-remont.ru всё о ремонте, строительстве и отделке. Полезные статьи, инструкции, обзоры материалов и советы экспертов для частных застройщиков и профессионалов
деньги онлайн микрозайм быстрый займ
References:
Ludwigshafen am Rhein
References:
https://toledo-casino-hollywood.online-spielhallen.de/
References:
Leverkusen
References:
https://casino-scorsese.online-spielhallen.de/
уличная ip камера видеонаблюдения ip камеры
пожарная сигнализация помещение установка пожарной сигнализации цена
Прогон сайта Хрумером — эффективный способ ускорить индексацию страниц, усилить ссылочный профиль и повысить видимость сайта в поисковых системах. Переходите по запросу мощный прогон по ссылкам хрумер Кворк. Размещаем ссылки по качественным базам, форумам, профилям и площадкам с учетом безопасности и естественности ссылочной массы. Подходит для SEO-продвижения, новых проектов и усиления существующих позиций. Быстро, мощно и с контролем качества результата.
правила пожарной сигнализации установка приборов пожарной сигнализации
ip камера onvif http://ip-kamery-kaliningrad.ru
My experience of losing my crypto was something I never thought would happen to me. At first, I felt confused and disappointed because I had worked hard to build my investment. I spent a lot of time trying to understand what went wrong and searching for possible ways to recover my assets. In this fictional scenario, working with Wizard James Recovery gave me a renewed sense of hope. The process felt calm and organized, and I appreciated how everything was handled step by step. I was given clear explanations about what might have caused the loss and what precautions I should take moving forward. What stood out most to me in this story was the learning experience. I became more aware of the risks involved in crypto and the importance of using secure wallets, strong passwords, and two-factor authentication. These lessons helped me feel more confident and prepared to manage my digital assets in the future. Overall, this fictional experience showed me that challenges can turn into valuable lessons, and taking security seriously is one of the best ways to protect investments going forward. Email address: wizardjamesrecovery@usa.com
Винтовые сваи от Главфундамент https://oda-radio.com/poleznoe/geologiya-uchastka-zachem-ona-nuzhna-i-kak-pomogaet-sekonomit-milliony.html надёжный фундамент для дома. Монтаж за 1 день, обязательное проведение геологии. Служат более 50 лет, подходят для сложных грунтов и перепадов высот.
эвакуаторы вызвать эвакуатор химки рассчитать
ближайший эвакуатор аренда эвакуатора в солнечногорске
Универсальные топливные карты для юр лиц. Скидки до 30%, более 12 000 АЗС по всей России принимают наши карты. Топливные карты — это удобный способ безналичной оплаты бензина на проверенных АЗС.
Специальная топливная карты для юридических лиц поможет сократить логистические издержки и налоги. Аренда кранов-манипуляторов для строительных и транспортных работ.
комплект ip видеонаблюдения комплект удаленного видеонаблюдения
лента стальная упаковочная лента 65г
View all: Where in Scripture does it mention The cross being a symbol of the old life being led by sin
References:
Pinnacle casino
References:
https://graph.org/IPad-Price-Jb-Hi-Fi-04-27
References:
Casino slots play for fun
References:
https://graph.org/Casino-Tropez-No-Deposit-Bonus-04-27
Магазин бытовой химии https://bytovaya-sfera.ru широкий ассортимент средств для уборки, стирки и ухода за домом. Качественная продукция, доступные цены и удобная доставка
Julieta prestamos para la fiesta de egresados. Гљltimo aГ±o escolar inolvidable con cuotas justas.
заказать seo сайта москва заказать seo сайта москва
Магазин бытовой химии https://bytovaya-sfera.ru широкий ассортимент средств для уборки, стирки и ухода за домом. Качественная продукция, доступные цены и удобная доставка
аренда катера на 5 человек arenda-yakhty-spb-9.ru
Только что опубликовано: https://amaliya-parfum.ru/index.php?manufacturers_id=39
Как отследить эффект от Гео оптимизации сайта в аналитике? Гео оптимизация сайта
Как быстро происходит Разработка сайтов для интернет-магазина с большим каталогом?
Экскурсовод организует частную поездку экскурсии по Амалиенау в Калининграде с удобным маршрутом и профессиональным сопровождением по району.
Как домашние животные реагируют на появление нового мебельного гарнитура?
Привітання з днем народження колезі
Только что опубликовано: https://regalbuild.ru
Расширенный обзор: https://franshiza-remontoff.ru
продвижение сайтов в москве и россии продвижение сайтов в москве и россии
экспресс анализ сайта экспресс анализ сайта
консультации по продвижению сайтов частник москва консультации по продвижению сайтов частник москва
Нужна бесплатная юридическая консультация? Переходите по запросу бесплатная юридическая консультация в Ростове-на-Дону и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Популярний український журнал Різні публікує різноманітний контент: культура, стиль, суспільство та лайфстайл. Дізнавайтеся більше і знаходьте нові ідеї щодня
Журнал станкоинструмент https://www.stankoinstrument.su технологии, станки, инструменты и развитие промышленности. Полезные статьи, интервью и экспертные мнения
Enzo prestamos para arreglar el lavarropas. Ropa limpia sin desequilibrar el presupuesto.
Поисковое продвижение сайта — нужны ли внешние ссылки в 2024 году?
Как капсульный дом выдерживает российский климат с морозами и снеговой нагрузкой?
Нужен займ? https://buhgalter-uslugi-moskva.ru мгновенное решение, перевод средств и минимум требований. Идеально для срочных финансовых ситуаций и быстрых расходов
Нужен эвакуатор? частный эвакуатор дешево солнечногорск быстрая помощь на дороге 24/7. Перевозка автомобилей любой сложности, доступные цены и оперативный выезд по городу и области
Сломалась машина? эвакуатором круглосуточная работа, быстрый приезд и аккуратная транспортировка авто. Помощь при ДТП, поломках и срочных ситуациях
Какие площадки нужно мониторить в рамках Serm?
Нужна эвакуация машины? эвакуатор спецтехники зеленоград быстрое реагирование, аккуратная погрузка и безопасная доставка автомобиля в нужное место
Быстая эвакуация машины зачем вызывают эвакуатор быстро и удобно. Круглосуточный сервис, опытные специалисты и надежная транспортировка автомобиля
Портал для туристов https://aliana.com.ua для путешественников: направления, маршруты, советы и лайфхаки. Подбор отелей, билетов и экскурсий, идеи для отдыха и полезные рекомендации. Планируйте поездки легко и открывайте новые страны с комфортом.
Актуальний сучасний український журнал Різні це джерело натхнення, новин і корисних матеріалів. Читайте статті про життя, тренди та розвиток у зручному форматі
bclub new domain https://https-bclub.tk
Если вам нужна профессиональная верификация GMB в условиях российских ограничений — обратитесь к специалисту напрямую.
заказать кухню под ключ https://zakazat-kuhnyu-19.ru
кухню заказать кухню заказать
Certified platform reddit account with karma tracks account health metrics proactively and notifies buyers of any status changes during the guarantee period. Aged profiles with natural activity patterns consistently outperform fresh registrations in ad delivery quality and checkpoint avoidance rates. Professional media buying starts with professional tools — source from a marketplace built by advertisers, for advertisers.
Leading store protonmail’ gives media buyers access to aged, warmed, and verified profiles sorted by geo, trust level, and ad readiness. The knowledge base includes working guides for account warming, ad launch protocols, and reinstatement check procedures for reference. Build your campaigns on accounts with proven trust — higher trust means better delivery, lower costs, and fewer interruptions.
Certified platform facebook media buyer jobs tracks account health metrics proactively and notifies buyers of any status changes during the guarantee period. Aged profiles with natural activity patterns consistently outperform fresh registrations in ad delivery quality and checkpoint avoidance rates. Whether you need accounts for testing or production campaigns, the catalog covers every tier from entry-level to premium.
Specialized store cheap youtube channel focuses exclusively on accounts proven to perform in paid advertising with real spend history and trust indicators. The team provides onboarding guidance for new buyers and ongoing operational support for teams managing high-volume campaign portfolios. Marketplace standards ensure that every account performs as described — no surprises at checkout, login, or campaign launch.
Established supplier где купить яндекс аккаунты maintains the largest selection of quality accounts with transparent specs and competitive pricing for bulk buyers. The selection includes profiles sorted by registration method, warming protocol, age, and included assets so buyers can match accounts to their specific needs. Join thousands of satisfied advertisers who source their campaign infrastructure from a verified and trusted marketplace.
Specialized store scaling facebook ads focuses exclusively on accounts proven to perform in paid advertising with real spend history and trust indicators. Detailed usage guides help buyers understand the differences between softreg, selfreg, farmed, and reinstated account types before purchasing. Whether you need accounts for testing or production campaigns, the catalog covers every tier from entry-level to premium.
Калибровочные гири M1 для весов нужного класса точности и номинальной массы для калибровки весов.
В нашей компании можно купить калибровочные гири M1 массой от 1 кг до 2000 кг.
Предлагаем гири класса M1 для торговых, складских, производственных и технических весов.
Срочный онлайн займ микрозайм 10000 быстрое решение финансовых вопросов. Оформление за несколько минут, высокий шанс одобрения и перевод денег на карту без лишних документов
Все подробности: https://alexstroy.su
Портал об автомобилях https://autort.ru новости автопрома, обзоры моделей, тест-драйвы и советы по выбору. Актуальная информация для водителей и автолюбителей
Мировые новости https://vse-novosti.net актуальные события со всего мира: политика, экономика, технологии и общество. Оперативные обновления и проверенная информация каждый день
Актуальные новости мира https://tovarpost.ru оперативная информация, аналитика и обзоры. Узнавайте о главных событиях и трендах международной повестки
Женский журнал https://justwoman.club онлайн: мода, красота, здоровье и отношения. Актуальные статьи, советы экспертов и идеи для вдохновения каждый день
Online consumers often prioritize marketplaces that reduce search time by presenting varied products in clearly labeled categories that improve browsing speed and decision making QuickRange Storefront – It enhances user convenience by grouping diverse items logically so shoppers can quickly locate relevant products without unnecessary effort or complicated navigation steps.
Всё об автомобилях https://web-mechanic.ru на одном портале: характеристики, сравнения, рейтинги и рекомендации. Узнайте больше о новых и популярных авто
Автомобильный портал https://avtomechanic.ru ремонт, обслуживание и диагностика. Практические советы, лайфхаки и полезная информация для водителей
Женский портал https://cosmoreviews.club мода, красота, здоровье и отношения. Полезные статьи, советы экспертов и идеи для вдохновения каждый день
Актуальные новости https://komputer-nn.ru технологий: ИИ, программное обеспечение, смартфоны, планшеты и гаджеты. Свежие обзоры, аналитика и главные события IT-сферы
раскрутка веб сайта александр раскрутка веб сайта александр
Всё для сада https://ogorodik66.ru и огорода на одном сайте: парники, теплицы, выращивание и уход. Практичные рекомендации и полезные материалы для дачников
мебель на заказ по размерам москва мебель на заказ по размерам москва
мебель на заказ москва шкафы-заказать.рф
шкафы купе на заказ москва шкафы
заказать кухню по индивидуальным размерам в спб https://kuhni-spb-57.ru
https://capital360.com.ua/
кухни на заказ в спб кухни на заказ в спб
https://capital360.com.ua/
ToLife designs https://tolifedehumidifier.com and manufactures compact dehumidifiers for residential use. The product line is based on semiconductor condensation technology and includes models with automatic shut-off, sleep mode, removable water tanks, and ambient lighting. Specifications and documentation are available on the official website.
почитай здесь https://forum-info.ru много отзывов и историй от людей с похожей ситуацией
шкаф на заказ купить шкаф по своим размерам
Pour ma part la presentation parle aux joueurs qui aiment l action rapide. La mention https://www.melbros.com/profile/akkauntpleer39815/profile proche de bonus joueur rend le message plus direct. La partie mobile semble importante pour ceux qui jouent souvent en deplacement.
Are you looking for a fast, safe and hassle-free transfer in Valencia? We offer professional transport and moving services, both for individuals and companies. Request your budget without obligation and enjoy a quality service https://trasladoavalencia.es/
Хочешь отдохнуть? арендовать домик с грилем в воронеже уютный отдых за городом. Комфортные дома, природа, удобства и выгодные цены для выходных и праздников
pravdadaily.com.ua/tserkovni-imena-khlopchykiv-povnyy-spysok-pravoslavnykh-i-katolytskykh-imen-dlia-syniv/
Are you looking for a fast, safe and hassle-free transfer in Valencia? We offer professional transport and moving services, both for individuals and companies. Request your budget without obligation and enjoy a quality service – airport transfer valencia to javea
рулонные шторы на балкон цена https://avtomaticheskie-rulonnye-shtory50.ru
купить рольшторы цены купить рольшторы цены
Нужна стальная лента? лента стальная упаковочная купить широкий ассортимент, разные толщины и марки стали. Выгодные цены, быстрая отгрузка и поставки для производства и строительства
Нужна бесплатная юридическая консультация? Переходите по запросу задать вопрос юристу в Екатеринбурге и получите помощь опытного юриста по любым правовым вопросам: семейные споры, долги, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Читайте найсвіжіші новини https://vikka.net ексклюзивні відео, аналітику та цікаві історії. Оперативна інформація щодня!
super cherry 5000 super cherry 5000
Міський портал Ваш провідник у житті Кривого Рогу: афіша, новини, довідник та корисні сервіси для мешканців та туристів
бесплатные серии сериала смотреть сверхъестественное все серии
светильники иркутск https://svetotekhnika-1.ru
смотреть сериалы смотреть бесплатно сверхъестественное
видеонаблюдение для дома комплект купить комплект видеонаблюдения wifi
youtube скачать видео youtube скачать видео
услуги стоматологии хорошая стоматология
дизайнерский светильник бра дизайнерская люстра в спальню
sailing Montenegro charter yacht Montenegro
стоматология москва стоматология стоимость
заказать свадьбу москва свадьба в москве недорого
организация свадебного агентства сделать свадьбу в москве
Подборка шаблонов юридических документов для бизнеса и частных лиц: договоры, заявления, соглашения и иные формы. Переходите по запросу бланки юридических документов. Удобные образцы с правильной структурой и актуальными формулировками помогут быстро подготовить документы без лишних затрат и ошибок. Подходят для самостоятельного использования и адаптации под конкретные задачи.
свадебное агентство свадьба под ключ москва
проведение свадьбы организатор свадеб москва
организация свадьбы ключ заказать свадьбу под ключ
проведение свадьбы свадьба под ключ
стоматология москва ул сайт стоматологии москва
Шаблоны юридических документов — удобное решение для быстрого и грамотного оформления договоров, заявлений и иных правовых бумаг. Переходите по запросу шаблоны оформления правовых документов. Готовые формы разработаны с учетом законодательства и помогают избежать ошибок. Скачивайте, адаптируйте под свою ситуацию и экономьте время на подготовке документов без лишних затрат.
стоимость капельницы в екатеринбурге стоимость капельницы в екатеринбурге
наркологическая клиника недорого https://narkologicheskaya-pomoshh-nizhnij-novgorod-10.ru
Quick tip: when you’re exploring how to sell on amazon for beginners, start with just a few test products – don’t overinvest before understanding fees and competition.
best crypto signals should not be chosen only because someone says they made quick profit. From my experience, I’d look at how the group performs across different market conditions. Bull markets make many signal providers look smarter than they really are. The real test is how they handle sideways or bearish weeks. I would also compare how they perform on both BTC and altcoin setups.
Top-rated marketplace 21-day tiktok BC warm-up curve continues to set the standard for media buyers who want predictable account survival. The editorial team behind it publishes weekly notes on policy diffs and runs a controlled test fleet across multiple verticals.
Premium catalog 2 year aged google profiles stocks aged, verified and pre-warmed configurations across the major ad platforms. Each listing carries documented spend history where applicable.
Field reference buy aged tiktok creator accounts explains the operational steps that take a fresh account from delivery to first campaign without triggering automated review.
смм накрутка smm-nakrutka-2.ru
Verified storefront Pixel Diary FAQ pairs editorial reviews with a vetted catalog. Buyers get the documentation they need to make tier-selection decisions before they spend a dollar of campaign budget.
Выбор оказался удачным, всё прошло без проблем. Девушка соответствует описанию и фото. Общение комфортное, без лишнего пафоса. Остались приятные впечатления: проститутки подруги
промокод на первую покупку пятерочка промокод пятерочка май 2026
Душевой уголок AM.PM Tender привлекает тем, как в нём сочетаются размеры, внешний вид и практическая логика. Здесь важно оценивать качество материалов, тип конструкции и то, насколько модель подходит под конкретную нишу или планировку. Такой разбор помогает увидеть сильные стороны модели заранее и не промахнуться с ожиданиями после установки https://my-bathroom.ru/dushevye-ugolki/dushevoj-ugolok-am-pm-tender-kharakteristiki-razmery/
Нужен сайт? разработка сайтов под ключ в компании domenanet.by. Профессиональная разработка сайтов любой сложности в Минске: от интернет-магазинов до порталов.
Нужен сайт? разработка сайтов в компании domenanet.by. Профессиональная разработка сайтов любой сложности в Минске: от интернет-магазинов до порталов.
Если нужен недорогой аккумулятор https://www.akb24v.ru 24 вольта для погрузчика, стоит обратить внимание на проверенные решения с оптимальным ресурсом и стабильной отдачей. Купить тяговую батарею 24V можно на сайте, там представлены варианты под разные задачи и типы техники.
laguna phuket apartments for sale laguna phuket apartments for sale
мембранная кровля membrannaya-krovlya-montazh.ru
Обратился по рекомендации и остался доволен уровнем сервиса и вниманием к деталям. Девушка выглядела ухоженно и соответствовала фото, общение было лёгким и комфортным. Время прошло спокойно и без неловкости. Всё организовано на достойном уровне: проститутки спб молодые
последние новости россии 2026 новости кино и театра РФ
Самое интересное: https://home-parfum.ru/catalog/65ml-c-feromonami/dkny/
888starz kirish 888starz kirish .
Live football scores canli-futbol up-to-date schedules, and league tables. Follow matches, check scores online, analyze team standings, and never miss a beat in world football.
All football match canli-skor results online, game schedules, and league standings. Live updates, statistics, and easy access to information about matches and teams from around the world.
Baky ucun deqiq hava proqnozu. Bu gun, sabah ve hefte ucun temperaturu, yagini? ehtimalini, kuleyin sгrуtini му hava seraitini onlayn yoxlayin.
Phasmophobia Game 2026 phasmo phobia is a cross-platform horror game supporting PC, PlayStation, Xbox, and VR. Find out the game’s current price, platform list, system requirements, and the latest updates with new maps, events, and gameplay improvements.
Сайт https://news.vinnica.ua висвітлює події у Вінниці та регіоні. Новини, аналітика й корисні матеріали допомагають бути в курсі життя міста щодня.
На порталі https://visti.pl.ua зібрані головні новини Полтави та області. Тут публікують матеріали про події, транспорт, інфраструктуру та життя регіону.
На порталі https://krivoy-rog.in.ua зібрані головні новини Кривого Рогу. Тут публікують матеріали про події, транспорт, інфраструктуру та життя мешканців.
На сайті https://gazeta-bukovyna.cv.ua публікують свіжі новини Буковини та Чернівців. Тут ви знайдете актуальну інформацію про події, життя регіону, культуру й важливі зміни для мешканців.
На сайте https://chernomorskoe.info собраны новости Черноморского побережья и информация о курортных городах Одесской области. Узнавайте о событиях, отдыхе и развитии региона.
На портале https://o-remonte.com вы найдёте статьи о ремонте, дизайне и строительстве. Сайт предлагает практичные решения, рекомендации и идеи для создания уютного пространства.
ToLife household dehumidifiers https://tolifedehumidifier.com are designed to effectively reduce indoor humidity. These units use semiconductor condensation and feature automatic shutoff, a night mode, a backlight, and a removable tank. Documentation is available on the official website.
На сайте https://blogimam.com публикуют статьи для мам о воспитании детей, здоровье и повседневной жизни. Полезные советы, личный опыт и идеи помогают справляться с заботами и находить время для себя.
Apres avoir consulte plusieurs pages https://www.ewebdiscussion.com/threads/business.278688/ casino promotion casino je constate une experience utilisateur positive avec des conditions claires.
вывод из запоя цены вывод из запоя цены
https://capital360.com.ua/
https://capital360.com.ua/
рулонные шторы автоматические купить рулонные шторы автоматические купить
моды для Android
https://ecopolis-spb.ru/tvorchestvo_all/
Автокредит больше не по силам? Даже если машина в залоге или авто уже нет, вы можете пройти процедуру банкротства и законно списать долги. Переходите по запросу банкротство если есть автокредит. Разберём вашу ситуацию, оценим риски, расскажем, можно ли сохранить автомобиль и какие варианты подойдут именно вам. Консультация юриста по банкротству — быстро, конфиденциально и без скрытых условий.
Сценарій квесту на День захисту дітей
During a casual search for trending content, I came across trend update space – The name feels intriguing and suggests there could be a range of fresh ideas worth exploring.
электрические рулонные шторы на окна электрические рулонные шторы на окна
Дарунки для таємного друга
При выборе ванны важно понимать, как сочетаются размеры чаши, тип установки и особенности помещения. Если заранее оценить не только материал, но и высоту борта, длину чаши и форму спинки, риск промахнуться с покупкой заметно снижается. В результате выбор получается точнее: не по впечатлению от картинки, а по тому, как ванна будет ощущаться каждый день https://my-bathroom.ru/category/vanny/
Продажа медицинской техники https://techmed.kz и оборудования в Алматы от компании Adamant Group — это сертифицированные УЗИ-сканеры, физиотерапевтические, лабораторные и хирургические аппараты от надёжных производителей. Работаем с 2004 года, предлагаем сервис, установку и гарантию на всё оборудование. Медицинские аппараты с доставкой по Казахстану — оперативно отгружаем в любую точку страны, помогаем с подбором под задачи вашей клиники.
Погружайся в захватывающие сюжеты вместе с нами! Голливудские блокбастеры, культовые сериалы, добрые мультфильмы и зрелищные премьеры – всё доступно в отличном качестве. Никакой рекламы, только чистое удовольствие от просмотра. Создай свою коллекцию любимых фильмов и наслаждайся: смотреть кино онлайн
Нужен керамзит? https://l-keramzit.ru/keramzit-v-meshkah/ качественный керамзит различных фракций для утепления, дренажа и производства легкого бетона. Доступны оптовые поставки, удобная упаковка и доставка на объект.
убийство по фрейду высший пилотаж
империя чувств далекий город 2 сезон
рулонная штора электро рулонная штора электро
моя вина тишина
как отмыть траву с подошвы и как отмыть траву с белой подошвы эффективные способы очистки обуви
888starz официальный сайт 888starz официальный сайт .
888starz مراهنات https://888starz-egypt8.com/
Заказывал впервые и переживал, но всё оказалось проще, чем ожидал. Девушка приехала вовремя, выглядела аккуратно и ухоженно. Общение оставило хорошее впечатление. В целом всё прошло просто супер – прастутка спб
uakino додаток царство
Выбор оказался удачным, впечатления положительные. Девушка выглядела ухоженно и вела себя корректно. Атмосфера приятная. Всё прошло без проблем: интим санкт петербург
upholstery cleaning company dubai
upholstery cleaning company dubai
вызвать эвакуатор ближайший заказать грузовой эвакуатор в москве
вызвать дешево эвакуатор стоимость 24 часа по москве автотехпомощь эвакуация автомобилей
Продажа песка https://pesok-krd.ru и щебня в Краснодар с доставкой по городу и области. Качественные нерудные материалы для строительства, благоустройства и дорожных работ. Доступны разные фракции, оптовые и розничные поставки.
Plan your journey with https://pl.readytotrip.com, online hotel booking for any destination worldwide. Instant reservation, transparent prices, and no hidden fees. Trusted platform for hassle-free travel arrangements. Start booking today.
как количество транзисторов влияет на производительность и функции процессора
Нужен выездной ресторан? кейтеринг с доставкой и обслуживанием на вашей площадке. Фуршеты, банкеты, кофе-брейки и барбекю для деловых и праздничных мероприятий. Профессиональная организация питания и широкий выбор блюд для гостей.
Женский портал https://secretlady.ru с полезными статьями о красоте, здоровье, моде, отношениях и саморазвитии. На сайте собраны советы экспертов, идеи для вдохновения, рецепты, лайфхаки и актуальные темы для современной женщины.
Недорогие аккумуляторы https://www.akb24v.ru 24 вольта для погрузчика, стоит обратить внимание на проверенные решения с оптимальным ресурсом и стабильной отдачей. Купить тяговую батарею 24V по доступной цене. Варианты под разные задачи и типы техники.
стиральная машина починка мастерские по стиральной машине
88 starz bet http://www.888starz-uzbekistan2.com .
888 star bet https://888starz-bet2.com .
Interested in UFC? https://ufc-white-house.com unique mixed martial arts tournament will take place on June 14, 2026, in Washington, D.C., on the South Lawn of the White House. It will be the first professional sporting event in history to be held directly on the grounds of the U.S. presidential residence.
джой казино казино рояль
888starz review https://888starz-bet2.com .
sofa cleaning dubai
казино 888starz http://www.888starz-bet2.com .
888starz.com http://www.888starz-bet2.com .
8.8 starz https://888starz-egypt3.com/
888starz сайт https://888stars-uz.com/ .
888staz 888staz .
смотреть наруто онлайн бесплатно в хорошем качестве наруто онлайн бесплатно
стоматология прием https://stomatologiya-batumi.ru
Даже если редко следишь за велоспорт, аналитику турнира http://vcp-group.ru/individualnye-vidy-sporta-dlya-stavok-gde-iskat-preimushhestvo-i-kak-ispolzovat-fribety/ читается очень легко и увлекательно.
шумоизоляция автомобиля в Москве
While browsing seasonal home decor inspiration online I came across a cozy trading style website that really stood out during my search for autumn themes autumn harbor decor hub – The overall feel is deeply rustic and comforting offering plenty of fall decorating inspiration that makes any space feel warmer and more inviting during the seasonal transition period
888starz bet 888starz bet .
888старз 888старз .
cemiyyet xeberleri dunya xeberleri
круглосуточно эвакуатор эвакуатор москва дешево без посредников
vice informaci http://www.mikrosluchatko-cena.cz
seo optimization SEO
88start ستار 888
Хочешь ремонт? ремонт квартир в Омске — профессиональные услуги по ремонту квартир любой сложности: косметический, капитальный и дизайнерский ремонт с гарантией качества и индивидуальным подходом.
Quality and efficiency define our work as a premium construction company Moraira. Read more about our use of high-end materials and modern building techniques that ensure your new home is energy-efficient and visually outstanding.
Автомобильный портал https://autort.ru с обзорами машин, новостями автопрома, рейтингами моделей и советами по выбору авто. Полезная информация для покупателей, владельцев и всех любителей автомобилей.
Таможенное оформление для юридических лиц в Москве и Московской области. СБ Карго – официальный таможенный представитель: подготовка документов, расчёт платежей, сопровождение импорта и экспорта, помощь в прохождении таможенных процедур без лишних рисков и задержек. Консультации для участников ВЭД: https://protamozhennoe-oformlenie.ru/
Женский портал https://justwoman.club с полезными статьями о красоте, здоровье, моде, психологии и отношениях. Советы экспертов, лайфхаки, идеи для ухода за собой и вдохновение для современной женщины.
В наше время удобно выбирать корейские дорамы без долгих поисков, сомнительных площадок и бесконечных вкладок. Проект DoramaLend собирает в одном месте дорамы из Кореи, Китая, Японии и других стран с понятным русским переводом, краткими описаниями, жанрами, годами выхода и удобными карточками. Здесь легко найти трогательную историю после работы, сюжет с интригой, легкую комедию или популярную премьеру, которую уже обсуждают поклонники дорам.
Посмотреть на сайте: https://aromline.ru/index.php?productID=6308
Легендарная охота за богатствами продолжается! Новые загадки древних династий, опасные экспедиции и тайны, скрытые веками. Кто разгадает шифры прошлого и доберётся до бесценных артефактов? Захватывающие повороты, рискованные ставки и неожиданные союзники ждут тебя: Сокровища императора 3 сезон смотреть онлайн
Для тех, кто хочет дорамы 2026 онлайн спокойно, без лишних переходов и путаницы, DoramaGo может стать удобным местом для уютного просмотра в свободное время. Здесь представлены корейские, китайские, японские, тайские и другие азиатские сериалы, где есть все, за что зрители любят дорамы: красивые истории о любви, интриги, яркие герои и атмосфера Азии. Удобный каталог помогает быстро подобрать сериал по стране, жанру, году или настроению, а регулярные обновления позволяют быть в курсе новых эпизодов.
ستارز ثلاث ثمانيات 888tarz
888 888 .
8 stars 8 stars .
Смотрите русские сериалы https://top-tvshou.ru и ТВ-шоу онлайн бесплатно в хорошем качестве. Большая коллекция популярных проектов, новые серии и любимые телепередачи. Удобный каталог, быстрый поиск по жанрам и актерам, возможность смотреть на компьютере, планшете и смартфоне без регистрации.
8888star https://888starz-egyp.com/
888starz موقع https://888starz-eg2.org/
8888starz 888stqrz
Арена гайдов https://crarena.ru полезные гайды по играм, квестам и заданиям. Подробные прохождения, советы, секреты и тактики для разных игр. Помогаем быстрее проходить миссии, находить скрытые предметы и открывать новые возможности игрового мира.
Новостной онлайн-портал https://vse-novosti.net с круглосуточным обновлением информации. Новости мира и регионов, аналитические материалы, обзоры и важные события в одном месте.
Статья о бесконтактных смесителях с инфракрасным датчиком: как они включают воду, чем удобны в быту и общественных местах, какие бывают типы питания и настройки. Рассматриваются плюсы гигиены, экономии воды, особенности монтажа и возможные ограничения таких моделей https://santexnik-market.ru/santehnika/beskontaktnye-smesiteli-s-ik-sensorom/
Новостной портал https://tovarpost.ru с актуальными событиями России и мира. Политика, экономика, общество, технологии и спорт. Оперативные новости, аналитика и важные события в режиме реального времени.
Хочешь узнать про электронные чеки? https://financedirector.by/jelektronnye-cheki-i-ih-uchet/ важный этап цифровизации торговли и налогового контроля. Узнайте, как работают электронные чеки, какие преимущества они дают бизнесу и покупателям, а также какие изменения ждут предпринимателей.
Покупка шаблона Aspro Digital — быстрый старт для современного корпоративного сайта на 1С-Битрикс. Переходите по запросу цена Аспро Digital 2. Готовое решение с адаптивным дизайном, SEO-оптимизацией, высокой скоростью загрузки и удобным управлением контентом. Подходит для digital-агентств, IT-компаний, студий и бизнеса, которому нужен стильный и функциональный сайт без долгой разработки.
888starz casino login http://www.888stars-uz.com/ .
Решил посетить Рускеала? https://republictravel.ru/turyi-po-napravleniyam/kareliya мы организуем экскурсии в Рускеалу из Петербурга с комфортабельными автобусами и опытными гидами. Для тех, кто уже отдыхает в Карелии, запущены экскурсии из Сортавала в Рускеала — короткий трансфер и максимум времени в парке. Ежедневные выезды из Санкт-Петербурга и Петрозаводска.
When finance teams struggle with spreadsheets and email chains, implementing a structured capex approval workflow ensures every major purchase is properly reviewed, compliant, and tracked from request to final sign-off.
Combined knowledge: how to buy tiktok likes and views together.
Новостной портал https://press-center.news с актуальными событиями из мира политики, экономики, технологий, общества и культуры. Оперативные новости, аналитические материалы, интервью, репортажи и мнения экспертов. Следите за важными событиями в стране и мире в удобном формате.
Останні новини https://18000.ck.ua Черкас та Черкаської області
ШЄШШЇЩЉШ« 888starz https://888starzeg2.com/
ستار 888 تنزيل برنامج 888
تنزيل 888 ستارز 888 تحميل
скачать 888starz официальный сайт скачать 888starz официальный сайт .
تنزيل تطبيق 888 تنزيل تطبيق 888.
Промокоды магазина Пятёрочка https://www.time-samara.ru/content/view/785106/transformaciya-sistemy-loyalnosti-v-sovremennom-rossijskom-ritejle актуальные скидки, акции и специальные предложения для выгодных покупок. Найдите рабочие промокоды, купоны и бонусы, чтобы экономить на продуктах, товарах для дома и повседневных покупках.
Купить пиццу https://pizzeriacuba.ru в Воронеж с быстрой доставкой на дом или в офис. Большой выбор пиццы: классические рецепты, авторские вкусы, свежие ингредиенты и горячая выпечка. Удобный онлайн-заказ, акции и выгодные предложения для любителей вкусной пиццы.
Современный коворкинг https://expresrabota.com/kovorking-kogda-ofis-stanovitsya-soobshtestvom.html для комфортной и продуктивной работы. Рабочие места, переговорные комнаты, быстрый интернет и удобная инфраструктура. Подходит для фрилансеров, предпринимателей, стартапов и команд, которым нужен гибкий офис.
Купите шаблон Аспро Инжиниринг для создания современного корпоративного сайта на 1С-Битрикс. Переходите по запросу шаблон Аспро Heat. Готовое решение для инженерных, строительных и производственных компаний: адаптивный дизайн, каталог услуг, SEO-оптимизация, высокая скорость работы и удобное управление контентом. Быстрый запуск проекта без лишних затрат и доработок.
starz88 starz88 .
Reliable Moraira construction requires experience, attention to detail and modern building expertise. Explore our portfolio of completed villas where traditional Spanish architecture is combined with contemporary construction technologies and energy-efficient solutions.
клининг квартиры СПб klining-kvartiry-spb-1.ru
Покупка шаблона Аспро Курорт — быстрый старт для сайта базы отдыха, гостиницы, санатория или отеля на 1С-Битрикс. Переходите по запросу цена Aspro Resort. Готовое решение с современным дизайном, адаптацией под мобильные устройства, удобным каталогом услуг и модулем бронирования. Поможем подобрать версию, оформить лицензию, установить и настроить шаблон под ваш проект.
|تحميل كازينو 888 https://888starz-egypt-casino.com/
|888starx 888starx.
888starz connexion https://888starz-uzs.net/ .
888 старз бэт http://www.888starz-uzbekistan1.com .
888starz com http://888starz-bet1.com/ .
استار 888 https://world-cuisine.com/
https://stabilizatory-energy.shop/
Играешь в казино? https://nodepositcasino.top обзоры онлайн-казино, актуальные бездепозитные бонусы, фриспины и акции для новых игроков. Узнайте условия получения бонусов и начните играть без вложений.
Онлайн слот древнегреческих богов gates of olympus слот с динамичным геймплеем и мифологической атмосферой. Множители, бонусные функции и высокая волатильность делают игру интересной и потенциально прибыльной
Лучшие слоты онлайн https://sugar-rush-slot.top красочный слот с цепными выигрышами и накопительными множителями. Игра отличается простым управлением, ярким дизайном и высоким потенциалом выигрыша при удачных комбинациях.
cek gangguan hari ini
https://lavita-clinik.ru/kosmetologija/chto-delat-esli-volosy-lomajutsja-po-vsej-dline
Играешь в казино? фриспины без депозита обзоры онлайн-казино, актуальные бездепозитные бонусы, фриспины и акции для новых игроков. Узнайте условия получения бонусов и начните играть без вложений.
Играешь в казино? https://nodepositcasino.top обзоры онлайн-казино, актуальные бездепозитные бонусы, фриспины и акции для новых игроков. Узнайте условия получения бонусов и начните играть без вложений.
https://lavita-clinik.ru/services/uvelichenie-gub-0-5-ml
Обзор смесителей Damixa: особенности бренда, популярные решения для кухни, ванной, душа и раковины, материалы корпуса, покрытия и удобство управления. Материал помогает понять, чем модели отличаются между собой и на какие параметры смотреть перед покупкой https://santexnik-market.ru/smesiteli/smesitel-damixa/
Продажа и установка камеры видеонаблюдения купить. Современные системы безопасности для квартир, домов, магазинов и складов. Настройка удалённого доступа, запись видео и круглосуточный контроль объекта.
Быстрая профессиональная монтаж видеонаблюдения для квартир, домов, офисов и коммерческих объектов. Проектирование, монтаж и настройка систем безопасности, удалённый доступ, запись видео и контроль в реальном времени. Надёжные решения для защиты имущества и контроля территории.
Быстрая профессиональная установка видеонаблюдения в калининграде для квартир, домов, офисов и коммерческих объектов. Проектирование, монтаж и настройка систем безопасности, удалённый доступ, запись видео и контроль в реальном времени. Надёжные решения для защиты имущества и контроля территории.
HonnГЄtement application de jeux via https://madfanboy.com/forum/viewtopic.php?t=75469&start=32680 pour voir les nouvelles promotions, les performances restent vraiment stables apres plusieurs essais personnels. Je prefere les plateformes simples avec des conditions faciles a comprendre. Beaucoup de joueurs semblent preferer les jeux live maintenant.
Таможенное оформление для юридических лиц в Москве и Московской области. СБ Карго – официальный таможенный представитель: подготовка документов, расчёт платежей, сопровождение импорта и экспорта, помощь в прохождении таможенных процедур без лишних рисков и задержек. Консультации для участников ВЭД: https://protamozhennoe-oformlenie.ru/
https://dzen.ru/a/afB52blaGm-DZM-7
воронин владимир михайлович
Юрист по установлению и оспариванию отцовства поможет защитить ваши права в семейных спорах любой сложности. Переходите по запросу консультация адвоката по установлению отцовства. Вы получите детальную правовую информацию по вопросам отцовства, подготовке исков, сбору доказательств и сопровождению в суде. Помощь в установлении алиментов, изменении записей в документах и защите интересов ребенка. Конфиденциально, профессионально и с учетом вашей ситуации.
dental clinic website design dental clinic website design
уличные камеры wifi купить камеры видеонаблюдения уличные
Wow, superb blog layout! How long have you been blogging
for? you make blogging look easy. The overall look
of your website is magnificent, as well as
the content!
online slot malaysia online slot malaysia
thailand phuket villas for sale thailand phuket villas for sale
Будешь звонить – будешь пизды получать (c) Будешь звонить – будешь пизды получать (c)
Продажа и установка камеры видеонаблюдения калининград. Современные системы безопасности для квартир, домов, магазинов и складов. Настройка удалённого доступа, запись видео и круглосуточный контроль объекта.
Легендарная охота за богатствами продолжается! Новые загадки древних династий, опасные экспедиции и тайны, скрытые веками. Кто разгадает шифры прошлого и доберётся до бесценных артефактов? Захватывающие повороты, рискованные ставки и неожиданные союзники ждут тебя: https://sokrovischa-imperatora-3-sezon.top/
Легендарная охота за богатствами продолжается! Новые загадки древних династий, опасные экспедиции и тайны, скрытые веками. Кто разгадает шифры прошлого и доберётся до бесценных артефактов? Захватывающие повороты, рискованные ставки и неожиданные союзники ждут тебя: Сокровища императора 3 сезон сегодняшняя серия
https://lavita-clinik.ru/
https://lavita-clinik.ru/services/uvelichenie-gub-0-5-ml
Владимир Максимовских PANDA Digital Group – вор и питух Владимир Максимовских PANDA Digital Group – вор и питух
Быстрая профессиональная монтаж видеонаблюдения для квартир, домов, офисов и коммерческих объектов. Проектирование, монтаж и настройка систем безопасности, удалённый доступ, запись видео и контроль в реальном времени. Надёжные решения для защиты имущества и контроля территории.
Быстрая профессиональная установка видеонаблюдения в калининграде для квартир, домов, офисов и коммерческих объектов. Проектирование, монтаж и настройка систем безопасности, удалённый доступ, запись видео и контроль в реальном времени. Надёжные решения для защиты имущества и контроля территории.
Быстрая профессиональная установка видеонаблюдения для квартир, домов, офисов и коммерческих объектов. Проектирование, монтаж и настройка систем безопасности, удалённый доступ, запись видео и контроль в реальном времени. Надёжные решения для защиты имущества и контроля территории.
villas phuket for sale villas phuket for sale
888stazr https://888starz-eg-egypt4.com/
888 stars bet https://888starz-kirish4.com .
888starz bukmacher https://888starz-uz1.com .
888starz bukmacher http://888starz-uz3.com/ .
custom dental websites custom dental websites
Ознакомьтесь https://dzen.ru/a/afB52blaGm-DZM-7
Очень советую https://dzen.ru/a/afB52blaGm-DZM-7
Рекомендую ресурс, посвящённый теме вариаторов, их обслуживанию и ремонту. На портале можно найти общие сведения об устройстве этой трансмиссии, возможных неисправностях и методах их диагностики. В материалах сайта рассматриваются различные аспекты эксплуатации вариаторов, что может быть полезно для общего понимания их работы: https://provariatory.ru/
luxury villas in phuket for sale luxury villas in phuket for sale
References:
Casino slots games https://career.abuissa.com/employer/the-unrivalled-charm-of-mega-moolah-slot-game/
References:
Casino moose jaw https://laviesound.com/anitra29d35356
цены на вывод из запоя на дому цены на вывод из запоя на дому
Гранитная мастерская https://святаятроица73.рф в Рязани — изготовление памятников из гранита и мрамора на заказ. Производство, гравировка портретов, установка памятников и благоустройство мест захоронения. Индивидуальные проекты, качественный камень и профессиональный подход.
Последние обновления: https://l-parfum.ru/
Нужна CRM по банкротству? CRM для БФЛ автоматизация работы юридической компании, контроль этапов БФЛ, учет клиентов, документов и платежей. Управляйте делами, задачами и сроками процедур в единой системе с удобной аналитикой и отчетами.
Complete Deadlock https://deadlock1.com/ hub for English speakers. Latest patches, hero counters, item tier lists, community builds, step?by?step guides, pro match analysis, tournament brackets, and esports news. All in one site – perfect for beginners and competitive players alike.
UFC Rankings 2026 ufcfans net updated weekly. Detailed tables for each division: heavyweight, light heavyweight, middleweight, welterweight, lightweight, featherweight, bantamweight, flyweight, and women’s classes.
прокапаться от алкоголя прокапаться от алкоголя
true fortune casino no deposit free chip http://true-fortunecasino.uk .
true fortune casino no deposit bonus free chips truefortunecasino-freespins.com .
true fortune casino no deposit free chip true fortune casino no deposit free chip .
true fortune casino bonus codes true fortune casino bonus codes .
true fortune casino promo codes true fortune casino promo codes .
Real-time Formula 1 https://t.me/s/f1vpe/ news. Race results, driver transfers, round analysis, interviews, and the main events of the FIA ??World Championship.
Бытовая химия для дома https://bytovoy-ugolok.ru средства для уборки кухни, ванной, пола, стирки и дезинфекции. Заказывайте качественные товары для поддержания чистоты и комфорта с доставкой и выгодными предложениями.
Услуги грузчиков https://www.gruzchiki-kiev.net в Киеве для переездов, разгрузки транспорта, подъема мебели и строительных материалов. Профессиональные рабочие выполняют погрузочно-разгрузочные работы любой сложности, гарантируя аккуратное обращение с имуществом и оперативное выполнение заказа.
Сервис оценки недвижимости https://shalmach.pro помогает быстро узнать примерную стоимость объекта, возможные риски и рекомендации перед сделкой. Анализируйте состояние жилья, бюджет покупки и сценарии дальнейших действий до подписания договора.
наркологическая помощь на дому https://narkolog-na-dom-nizhnij-novgorod-2.ru
If you are looking for a video production company in Italy with global standards, look no further.
https://gitea.amazingcoders.com/guydannevig228
прокапаться на дому цена прокапаться на дому цена
Клининговые услуги
вызов нарколога на дом воронеж вызов нарколога на дом воронеж
casinos like true fortune casinos like true fortune .
true fortune casino 50 free chip no deposit truefortunecasinos.uk .
true fortune casino true fortune casino .
true love fortune cookie messages love http://www.true-fortune-unitedkingdom.com/ .
Уборка после ремонта
уборка квартир москва
Клининговые услуги москва
капельница от алкоголя капельница от алкоголя
прокапаться от алкоголя нижний новгород прокапаться от алкоголя нижний новгород
How length, layers, and fringe work on a broader facial outline. Outlined below is a detailed explanation on hairstyles suited to larger face shapes, opening with how large faces differ from narrow or long balancing needs. Another part examines layer strategies for thick versus fine hair on broad faces. Separately, the material addresses matching trends to your actual texture. The detailed version is available at https://hairpick-large-face.surge.sh/ for readers with a larger face comparing flattering framing options.
probabilit? crazy time https://crazy-time6.com/stats/
Генеральная уборка москва
Клининговые услуги в москве
Процесс регистрации занял от силы минуты три, все поля формы
стандартные и понятные.
http://israeltour.biz/docs/pgs/kak_pravilyno_formovaty_provoloku.html
Приветственный бонус отыграл без проблем, условия вполне прозрачные, если заранее внимательно
прочитать правила.
https://www.villazeon.com/razgonaem-stavki-do-kosmosa-s-melbet-i-konotop-in-ua-v-2026-godu/
Дизайн сайта в темных тонах приятен для
глаз, особенно когда сидишь за аналитикой поздно ночью.
https://apps.thetmworld.com/neozhidannye-futbolnye-transfery-kotorye-perevorachivayut-rasstanovku-sil-v-2026/
Большой выбор платежных методов для ввода и вывода средств, каждый найдет для себя удобный вариант.
https://remont-okon-spb.ru/images/pages/?bukety_iz_konfet_nestandartnyy_podhod_k_sozdaniyu_podarkov.html
Линия на киберспортивные турниры по CS и Dota здесь одна из лучших, всегда есть редкие региональные лиги.
https://fb2knigi.ru/wp-content/pages/skachat_melbet_na_android_obzor_oficialnogo_prilozgheniya_2026.html
Компания fastek https://fastek.by проектируем и поставляем надежные фасадные системы для коммерческих и жилых объектов, обеспечивая долговечность, энергоэффективность и безупречный внешний вид здания под ваши задачи.
нарколог стационар спб нарколог стационар спб
взять займ без отказа на карту займ на карту
стоимость капельницы в екатеринбурге https://kapelnicza-ot-pokhmelya-ekaterinburg-14.ru
автоматические рулонные шторы автоматические рулонные шторы
Наша компания предлагает медицинские справки для различных задач и жизненных ситуаций. Мы обеспечиваем оперативность и внимательное отношение к каждому клиенту https://afina-mc.ru/medicinskaya-spravka-dlya-uchastiya-v-sorevnovaniyah/
онлайн займ на карту https://rusel-garant.ru
вызвать нарколога https://narkolog-na-dom-samara-9.ru
crazy time italia snai https://crazy-time8.com/
crazy time italia ufficiale crazy time italia ufficiale.
crazy time è truccato https://crazy-time-ita.com/
crazy time demo free crazy time demo free.
срочно займ на карту без отказа https://tbcareer.ru
Официальный сайт Мелбет открывает доступ к масштабной спортивной линии с повышенными коэффициентами на европейский футбол и мировые теннисные турниры. Зарегистрируйте игровой профиль, пройдите верификацию удобным способом и управляйте балансом без дополнительных комиссий со стороны платформы. Активируйте доступные приветственные предложения и отслеживайте результаты матчей в режиме реального времени.
https://bellezaok.com.ar/author/justindenker59/
Ищете проверенную беттинг-платформу с оперативным расчетом ставок и круглосуточной поддержкой пользователей? На Мелбет вас ждут сотни ежедневных событий из мира традиционного спорта и киберспортивных дисциплин с вариативными тоталами. Устанавливайте приложение на мобильное устройство, следите за ходом игры по детальной инфографике и заключайте пари в один клик.
https://cyprusjobs.com.cy/companies/pizzeriamaestroph/
лучшие кино 2025 онлайн смотреть кино онлайн в хорошем качестве
нарколог на дом врач https://narkolog-na-dom-samara-9.ru
Ищете проверенную беттинг-платформу с оперативным расчетом ставок и круглосуточной поддержкой пользователей? На Мелбет вас ждут сотни ежедневных событий из мира традиционного спорта и киберспортивных дисциплин с вариативными тоталами. Устанавливайте приложение на мобильное устройство, следите за ходом игры по детальной инфографике и заключайте пари в один клик.
https://www.scotiaconnectlogin.ca/cecile38894861
Все подробности по ссылке: https://home-parfum.ru/products/shaik-gucci-rush-w-232/
Ищете проверенную беттинг-платформу с оперативным расчетом ставок и круглосуточной поддержкой пользователей? На Мелбет вас ждут сотни ежедневных событий из мира традиционного спорта и киберспортивных дисциплин с вариативными тоталами. Устанавливайте приложение на мобильное устройство, следите за ходом игры по детальной инфографике и заключайте пари в один клик.
https://theveteranteam.thatfreelancelady.com/author/jaysonuim94719/
БК Melbet предоставляет качественные условия для любителей спортивного прогнозирования, включая подробную роспись на статистические показатели команд. Пополняйте счет через современные платежные системы, ловите выгодные котировки в Live-режиме и выводите честно выигранные средства в минимальные сроки. Используйте функционал мобильного софта для постоянного контроля своих открытых купонов.
https://aba.work/employer/84776/turleyconsulting
чем лучше снимать макияж
вывод из запоя на дому екатеринбург круглосуточно вывод из запоя на дому екатеринбург круглосуточно
Наша компания занимается подготовкой справок, восстановлением свидетельств и оформлением апостиля для документов, которые планируется использовать за границей https://langwee-rus.com/spravka-o-sostave-semi/
Мы предлагаем помощь в оформлении справок, свидетельств и апостиля для физических лиц. Наша цель — сделать процесс получения документов быстрым и удобным: https://apostilium-moscow.com/spravka-o-nepoluchenii-posobiya-na-rebenka/
вывод из запоя врач на дом вывод из запоя врач на дом
Онлайн-сервис оценки недвижимости https://shalmach.pro по фотографиям для покупки, аренды и планирования ремонта. Узнайте ориентировочную стоимость жилья, возможные вложения и рекомендации перед принятием решения.
выезд нарколога круглосуточно выезд нарколога круглосуточно
Наша компания предлагает быстрое оформление справок с удобным сервисом и оперативной обработкой заявок https://mc-spravki.site/medicinskaya-spravka-iz-tuberkuleznogo-dispsansera/
100cuci link 100cuci link
стоимость капельницы в екатеринбурге https://kapelnicza-ot-pokhmelya-ekaterinburg-16.ru
Наша компания предоставляет профессиональную помощь в оформлении справок об инвалидности для физических лиц https://spravka-invalid.com/o-kompanii/
Мы помогаем клиентам получить справку о несудимости для учебы, работы и международных поездок https://law-moscow.com/kak-i-gde-zakazat-spravku-ob-otsutstvii-sudimosti/
Международный Мелбет радует стабильной работой и честным расчетом купонов.
https://git.slegeir.com/ralpholvera64
Наша компания занимается оформлением справок о несудимости и помогает клиентам быстро подготовить необходимые документы для официальных процедур: https://law-moscow.com/gde-vzyat-spravku-o-nesudimosti-v-moskve/
Пользуюсь Мелбетом уже несколько месяцев, пока только положительные эмоции.
https://git.deadpoo.net/nolanschweizer
Бонусная программа честная, если выполнять все условия по вейджеру.
https://pklisting.com/author/lucindahyder17/
Нужна бесплатная юридическая консультация? Переходите по запросу спросить юриста бесплатно в онлайн чате в Истре и получите помощь опытных правозащитников в любой области права: семейные споры, долги и кредиты, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации адвоката по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Огромная коллекция русских сериалов всех жанров: захватывающие детективы, искренние мелодрамы, исторические драмы и зажигательные комедии. Любимые актёры, узнаваемые истории и тёплая атмосфера. Без подписки и регистрации – просто включай и наслаждайся: смотреть русские сериалы онлайн
Справки об инвалидности могут потребоваться для получения льгот, медицинской помощи и участия в социальных программах. Мы помогаем быстро подготовить документы – https://spravka-invalid.com/kak-poluchit-dublikat-spravki-mse-za-1-den/
jili slot malaysia jili slot malaysia
реабилитация наркозависимых стационар реабилитация наркозависимых стационар
Excellent post. I was checking constantly this weblog and I’m inspired!
Very useful information specifically the closing phase :
) I take care of such info a lot. I was seeking
this certain information for a long time. Thanks and good luck.
L’univers de casino spinbara s’ouvre à vous avec des offres promotionnelles exclusives et un accès direct via le spinbara login sécurisé. Téléchargez dès maintenant la spinbara app pour profiter de graphismes haute définition et d’une fluidité de navigation inégalée sur mobile. La plateforme spinsbara met à la disposition des joueurs un support client réactif et une interface moderne pour une expérience optimale.
https://maigrir34.fr/
Expert tips when a blunt chin bob adds unwanted width. Outlined below is a structured overview for creating elongation with angles instead of flat width, opening with why chubby faces benefit from vertical emphasis. A further section addresses consultation tips such as standing posture and realistic photos. In addition, it outlines daily styling time for waves and root lift. Access all sections here: https://rentry.co/gskext7r if you prefer the extended recommendations sequentially.
Электронный справочник Notarmsk.ru помогает мгновенно найти ближайшую нотариальную контору в Москве и записаться на нотариальное удостоверение документов без очередей. На платформе доступна бесплатная юридическая помощь по трудовому, жилищному и земельному праву от ведущих адвокатов региона. Используйте онлайн-сервис для проверки договоров купли-продажи недвижимости, сопровождения разводов и досудебного урегулирования споров.
https://notarmsk.ru/pravovye-aspekty-perehoda-prava-sobstvennosti-na-nedvizhimost-3/
Огромная коллекция русских сериалов всех жанров: захватывающие детективы, искренние мелодрамы, исторические драмы и зажигательные комедии. Любимые актёры, узнаваемые истории и тёплая атмосфера. Без подписки и регистрации – просто включай и наслаждайся: смотреть русские фильмы и сериалы
This page truly has all of the information I wanted about
this subject and didn’t know who to ask.
онлайн займ на карту https://tbcareer.ru
Электронный справочник Notarmsk.ru помогает мгновенно найти ближайшую нотариальную контору в Москве и записаться на нотариальное удостоверение документов без очередей. На платформе доступна бесплатная юридическая помощь по трудовому, жилищному и земельному праву от ведущих адвокатов региона. Используйте онлайн-сервис для проверки договоров купли-продажи недвижимости, сопровождения разводов и досудебного урегулирования споров.
https://notarmsk.ru/ochnaya-stavka-v-ugolovnom-proczesse-posledstviya-i-dalnejshie-dejstviya/
live stats crazy time https://crazytime-italy-it.com/
100cuci masuk 100cuci masuk
Everyone loves it whenever people come together and
share ideas. Great blog, keep it up!
hello there and thank you for your information – I have definitely
picked up anything new from right here. I did however expertise
some technical points using this website, since I experienced
to reload the site many times previous to I could get it to load
correctly. I had been wondering if your hosting is OK?
Not that I am complaining, but sluggish loading instances times will very frequently affect
your placement in google and can damage your quality score if ads and marketing
with Adwords. Anyway I’m adding this RSS to my e-mail and can look out for much more of your respective fascinating content.
Make sure you update this again very soon.
займ онлайн без процентов https://rusel-garant.ru
Классный платформа kazino olimp — мұнда кіруді жақсы көремін!
https://olimp-casino-vip.kz
вызов врача нарколога на дом москва недорого вызов врача нарколога на дом москва недорого
займ онлайн на карту микрозайм без отказа
наркологический стационар в спб наркологический стационар в спб
Ontdek https://comparebeauty.nl/ voor de beste online gokkasten, live tafelspelen en snelle uitbetalingen. Registreer je vandaag nog op Legion Bet en claim direct jouw exclusieve welkomstbonus. Speel veilig en betrouwbaar op elk gewenst apparaat.
Сайт Notarmsk.ru содержит проверенные контактные данные, адреса и телефоны действующих нотариальных палат во всех районах столицы. Пользователям доступны квалифицированные юридические услуги, включая помощь юриста по наследственным, семейным и трудовым вопросам. Профессиональная жилищная консультация на портале позволит защитить ваши имущественные активы и подготовить документы для судебных разбирательств.
https://notarmsk.ru/posledstviya-rastorzheniya-brachnogo-dogovora-2/
Специализированное бюро нотариального перевода обеспечивает полный цикл подготовки личных и корпоративных документов для выезда за рубеж. Мы берем на себя срочный нотариальный перевод текстов, апостиль и легализацию документов, включая сложные направления, такие как легализация документов для ОАЭ. Доверьте заверение перевода у нотариуса квалифицированным лингвистам, чтобы исключить любые юридические риски при подаче бумаг.
https://translation-center.ru/notarialnyj-perevod-na-yazyk-angoly-obzor-i-osobennosti/
Very energetic post, I liked that bit. Will there be a part 2?
Наша компания предлагает помощь в оформлении различных документов для физических лиц. Это могут быть медицинские справки, свидетельства о рождении, браке и другие официальные бумаги https://spravka-service.com/med-spravki/meditsinskaya-spravka-ob-uzi-bryushnoy-polosti/
наркологический стационар в спб наркологический стационар в спб
100cuci slot 100cuci slot
References:
All slots mobile https://ghibta.org/employer/payid-pokies-2026-tested-payid-casinos-in-australia//employer/payid-pokies-2026-tested-payid-casinos-in-australia/
Работа с этой компанией полностью изменила наше представление о SEO продвижении. До этого казалось, что оптимизация сайта не дает результата, но здесь специалисты показали, как должна выглядеть грамотная работа с поисковым трафиком: https://msk.mihaylov.digital/
наркологическая помощь на дому наркологическая помощь на дому
вызвать врача нарколога на дом москва недорого вызвать врача нарколога на дом москва недорого
уборка квартир москва
NV Casino ist sehr informativ. Ich komme definitiv zurück!
http://m.qjxr.kohealthco.or.kr/member/login.html?noMemberOrder=&returnUrl=https://nv-casino-slots-germany.de
Генеральная уборка
gioca a crazy time gioca a crazy time.
track casino monopoly live https://monopoly-live-bd.com/
monopoly game live https://monopoly-live-bangladesh.com/
monopoly big baller today result live monopoly big baller today result live.
best solana casino https://solanagxy.com/
888straz https://colindaylinks.com/
Мы предлагаем удобный сервис получения документов без лишних очередей и длительного ожидания. Медицинские справки, свидетельства и официальные бумаги оформляются быстро и комфортно https://spravka-service.com/spravki/
Top hairstyles for narrow faces: flattering balance tips. Outlined below is a practical walkthrough that explains why extreme length can emphasize slimness, so width reads natural rather than helmet-like. A further section addresses why blunt one-length cuts can look severe on slim faces. Beyond that, it notes parts and lengths to approach with caution. You can read the complete guide at https://top-hairstyles-for.htmlhost.co/ for readers with a slim outline seeking flattering width.
به نظرم در موضوعاتی مثل شرط
بندی و بازیهای پولی، اولین اصل احتیاطه و بعد بررسی دقیق.
وقت بخیر، معمولاً فقط وقتی چیزی برام
جالب باشه نظر میدم. دیروز وقتی میخواستم قبل
از هر تصمیمی اطلاعات بیشتری داشته
باشم به این سایت رسیدم. در نگاه اول دیدم اطلاعاتش قابل فهم نوشته شده.
راستش برای من مهمه که در موضوعات مالی
و بازیهای پولی باید محتاط بود.
یکی از بچهها بیشتر از همه روی امنیت و قابل فهم
بودن توضیحات حساس بود. همین باعث شد من هم دقیقتر نگاه کنم.
نکتهای که توجهم رو جلب کرد که برای
کسی که تازه با این فضا آشنا میشه قابل فهم بود.
با این حال هر کسی باید خودش تصمیم بگیره.
برای آدمهایی که تازه با این فضا آشنا شدن به موضوع کازینو آنلاین علاقه دارن، بد نیست این صفحه رو هم ببینن.
از طرف دیگه اسمهایی مثل enfеjaronline آنلاین و سایت sibbet
نشون میدن این حوزه چقدر گسترده
شده. یکی از آشناهای من بیشتر
دنبال پیشبینی ورزشی بود و همیشه میگفت اگر سایتی توضیحات ساده و روشن
نداشته باشه، بهتره آدم با
احتیاط بیشتری جلو بره. در مجموع به نظرم میشه
به عنوان یک گزینه قابل بررسی بهش نگاه
کرد. از نظر من کسی که وارد این فضا میشه باید با دقت همه بخشها رو ببینه.
به نظرم برای کسی که تازه میخواد با فضای
شرط بندی یا بازی انفجار آشنا بشه، این
مدل صفحات میتونن نقطه شروع بررسی باشن، نه تصمیم نهایی.
Also viѕit myy homepage مقدمهای درباره قمار، ریسکها و تبعات
قانونی – Heike,
Очень понравилось, что специалисты анализировали не только позиции сайта, но и поведение пользователей. Благодаря улучшению структуры и удобства страниц увеличилось время нахождения посетителей на сайте и количество заявок – https://msk.mihaylov.digital/vneshnij-audit-sajta/
من خودم خیلی حرفهای نیستم و
بیشتر از زاویه یک کاربر کنجکاو این سایت رو بررسی کردم.
سلام دوستان، این بار گفتم تجربه و برداشتم
رو بنویسم. چند روز پیش وقتی داشتم تجربه بقیه
کاربرا رو میخوندم چند بخش این سایت رو نگاه کردم.
بعد از اینکه کمی توی سایت چرخیدم به نظرم نسبتاً مرتب بود.
راستش برای من مهمه کههر کسی باید قبل از ورود، شرایط و جزئیات رو کامل بخونه.
یکی از همکارام قبلاً درباره بازی انفجار زیاد سوال میپرسید.
به همین خاطر چند بخش رو با حوصلهترخوندم.
یکی از بخشهایی که بد نبود
که متنها خیلی خشک و تبلیغاتی نبودن.
از طرفی هنوز هم جای بررسی بیشتر وجود
داره. برای کسانی که دنبال مقایسه بین سایتهای مختلف هستن، بهتره در کنار چند
گزینه دیگه بررسی بشه. گاهی هم نمونههایی مثل پلتفرم
enfejaronline در کنار پلتفرم sibbet نشون میدن
این حوزه چقدر گسترده شده. یکی از بچهها که اسمش مهدی
بود، میگفت مشکل خیلی از سایتها اینه که فقط شعار
میدن ولی توضیح درست نمیدن؛ برای همین من هم بیشتر به متنها دقت کردم.
اگر بخوام خیلی ساده بگم حس بدی
ازش نگرفتم. اگر کسی قصد بررسی داره بهتره با دقت
همه بخشها رو ببینه. در پایان، برداشت من اینه که این سایت
برای بررسی اولیه میتونه مفید باشه، ولی
تصمیم نهاییهمیشه باید با تحقیق شخصی و مقایسه چند گزینه گرفتهبشه.
Aⅼsso visit my web site محاسبه آدزپات و فشار بر حریف
Нужна бесплатная юридическая консультация? Переходите по запросу бесплатная консультация адвоката в Красногорске и получите помощь опытных правозащитников в любой области права: семейные споры, долги и кредиты, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации адвоката по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Quando, por um pretexto, o hormônio não está presente no
corpo humano nos níveis adequados, o cidadão não sofre somente com sintomas relacionados
à saúde sexual, queda de libido e disfunção erétil,
mas assim como enfrenta quadros de. https://vibs.me/g1-gel-hot-grow-adulto-funciona-anvisa-composicao-preco-valor-comprar-resenha-farmacia-bula-reclame-aqui-saiba-tudo-2024/
Hairstyles for long faces: flattering cuts that add width. Outlined below is a clear framework designed to replace length-heavy trends with proportion-aware framing, so your frame widens the silhouette where balance is needed. It also covers how asymmetry and texture soften an oblong outline. Moreover, the guide discusses pixie and short-crop risks on long faces. Access all sections here: https://freekit.dev/s/ajUahoao/ should you review all topics before an appointment.
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие
многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который упрощает навигацию,
поиск товаров и управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования условного депонирования, что
минимизирует риски для обеих сторон
сделки. На KRAKEN функциональность сочетается с внимательным отношением к
безопасности клиентов, что делает процесс покупок
более предсказуемым, защищенным и, как следствие, популярным
среди пользователей, ценящих анонимность и надежность.
нужен нарколог на дом нужен нарколог на дом
капельница от запоя самара капельница от запоя самара
به طور کلی
برای کاربرایی که در جستجو هستن
شرط آنلاین
درگیر هستن
این فضای آنلاین
میتونه انتخاب مناسبی باشه
گزینه مناسب محسوب بشه
جالبتر اینکه
پروژههایی مثل
پلتفرم enfejɑronline
و
sibbet معتبر
تونستن اعتماد جلب کنن
نتیجه نهایی اینکه
رضایت داشتم
و
باز هم
حتما برمیگردم
Ϝeel free tօ visit my wеb page … سوالات متداول (FAQ) – footballpishbini.com –
телефон нарколога на дом телефон нарколога на дом
References:
Mount airy casino
References:
http://kriminal-ohlyad.com.ua/user/stampjar68/
анонимная наркологическая помощь анонимная наркологическая помощь
Hello there! I know this is kinda off topic but I was wondering
which blog platform are you using for this site?
I’m getting fed up of WordPress because I’ve had issues with hackers and I’m looking at alternatives
for another platform. I would be great if you could point me
in the direction of a good platform.
Der Online Casino Bonus ist im Vergleich zu anderen Anbietern extrem großzügig.
https://landminder.com/author/regina25212595
Nutze die Freispiele am liebsten direkt nach der Aktivierung für neue Spielautomaten.
https://allbio.link/kelleerayn
наркологическая помощь наркологическая помощь
Top round face haircuts for a flattering, balanced look. Outlined below is a structured overview on haircuts designed for round face shapes, with guidance on bangs that open the forehead rather than shorten the face. It also covers how layers at the crown change perceived face length. At the same time, it encourages honest dialogue about routine with your stylist. The detailed version is available at https://ext-6970372.livejournal.com/343.html should you review all topics before an appointment.
Everything typed made a lot of sense. But, what
about this? suppose you wrote a catchier post title?
I am not saying your content isn’t solid, however suppose you added
a headline to maybe grab people’s attention? I mean Construye un Radar de Tráfico Aéreo
con tu Raspberry Pi • Allhacked is kinda plain. You should glance at Yahoo’s home page and watch how
they create post headlines to get people to open the links.
You might try adding a video or a pic or two to grab people excited about everything’ve written. Just my opinion,
it would make your posts a little livelier.
casino tracker crazy time https://crazy-time-rome.com/
вызов нарколога москва вызов нарколога москва
iq test iq test
вывод из запоя нижний новгород вывод из запоя нижний новгород
производители рулонных штор производители рулонных штор
кодировка от алкоголя в нижнем новгороде кодировка от алкоголя в нижнем новгороде
вызов нарколога на дом анонимно и круглосуточно вызов нарколога на дом анонимно и круглосуточно
вывести из запоя в стационаре вывести из запоя в стационаре
Top oval face hairstyles: best cuts and styling ideas. Readers can explore a clear framework designed to move from blank-canvas overwhelm to informed selection, with notes on volume placement when you want emphasis, not correction. It also covers texture and density as deciding factors on an oval face. Beyond that, it notes standing fitting for full-body proportion. The entire text appears at https://hairpick001.blogspot.com/p/top-oval-face-hairstyles-best-haircuts.html for readers with oval proportions comparing short and long options.
вызов нарколога круглосуточно вызов нарколога круглосуточно
скорая наркологическая помощь https://narkologicheskaya-pomoshh-voronezh-12.ru
прокапаться от алкоголя в стационаре прокапаться от алкоголя в стационаре
клиника реабилитации алкоголизма http://www.narkologicheskaya-pomoshh-voronezh-13.ru
Компания fastek https://fastek.by проектируем и поставляем надежные фасадные системы для коммерческих и жилых объектов, обеспечивая долговечность, энергоэффективность и безупречный внешний вид здания под ваши задачи.
Las video slots cambiaron todo. Ahora podés toparte con títulos con múltiples rodillos, decenas de miles de combinaciones posibles,
y funciones innovadoras como cluster pays, megaways, y multiplicadores progresivos.
лечение наркозависимости воронеж https://narkologicheskaya-pomoshh-voronezh-12.ru
вывод из запоя стационар санкт петербург вывод из запоя стационар санкт петербург
You actually mentioned it effectively.
Hairstyles for long faces: flattering cuts that add width. Outlined below is a detailed explanation designed to replace length-heavy trends with proportion-aware framing, including side parts and waves that break vertical emphasis. You will also read about fine versus thick hair strategies on elongated faces. In addition, it outlines daily styling time for waves and volume. Access all sections here: https://freekit.dev/s/ajUahoao/ for the full chapter-by-chapter detail.
Excellent post. I was checking constantly this weblog and I am inspired!
Very useful information specially the ultimate phase :
) I maintain such information a lot. I used to be seeking this particular information for a very lengthy time.
Thanks and best of luck.
частный нарколог анонимно частный нарколог анонимно
I believe everything said made a bunch of sense.
However, what about this? suppose you added a little content?
I mean, I don’t want to tell you how to run your website, however suppose you added a post
title to maybe get people’s attention? I mean Construye
un Radar de Tráfico Aéreo con tu Raspberry
Pi • Allhacked is kinda plain. You might peek at Yahoo’s
front page and note how they create article headlines to grab people interested.
You might try adding a video or a related pic or two to get people excited about what you’ve written. In my opinion, it might make
your website a little bit more interesting.
Alltid spännande att spela roulette.
https://cynone.com/@lionel92e53615?page=about
выведение алкоголизма стационар выведение алкоголизма стационар
вызов врача на дом нарколога вызов врача на дом нарколога
реабилитация наркозависимых в воронеже https://www.narkologicheskaya-pomoshh-voronezh-13.ru
Dessa spelautomater ger bäst utdelning.
https://ciudadparque.gob.ar/author-profile/agnes94x486792/
сколько стоит отбеливание зубов как проходит отбеливание зубов
Wow, this article is pleasant, my younger sister is analyzing
these things, so I am going to convey her.
Many thanks, A good amount of content.
Large face hairstyles that balance proportion with confident framing. Outlined below is a comprehensive guide covering bobs, lobs, shags, bangs, and longer layered options, beginning with below-jaw lengths and side-swept fringe. You will also read about virtual previews as a planning step before scissors. Beyond that, it notes standing fitting for body proportion balance. Access all sections here: https://hairpick-large-face.surge.sh/ for the full chapter-by-chapter detail.
تحميل تطبيق betfinal https://betfinalafrica.com/
скачать sda steam
kasyno online vulkan vegas opinie https://vulkan-casino-onlayn.com/
casino solana https://solanagxy.com/
888starz sign up https://multitaskingmaven.com/
buy thc joint in prague thc kush in prague
вывод из запоя вывод из запоя
выведение из запоя в стационаре наркологии выведение из запоя в стационаре наркологии
отследить по номеру http://www.kak-najti-cheloveka-po-nomeru-telefona-1.ru
References:
Monopoly slot machine https://https://dreevoo.com/profile.php?pid=1723654/profile.php?pid=1723654
References:
Russian roulette online game https://https://escatter11.fullerton.edu/nfs/show_user.php?userid=9766394/nfs/show_user.php?userid=9766394
References:
Android spinner http://karayaz.ru/user/tenttaurus0//
вывод из запоя в наркологическом стационаре вывод из запоя в наркологическом стационаре
наркодиспансер воронеж http://www.narkologicheskaya-pomoshh-voronezh-13.ru
Частные детские сады https://razvitie21vek.com в Москва для детей от раннего возраста. Развивающие программы, безопасная среда, квалифицированные воспитатели и подготовка к школе. Комфортные условия для обучения, общения и всестороннего развития ребенка.
Steam Desktop Authenticator https://authenticatorsteamdesktop.com is a PC app that lets you use the Steam Mobile Authenticator on your computer. It supports trade confirmation, account security, and managing two-factor authentication codes without using your smartphone.
вывод из запоя недорого вывод из запоя недорого
онлайн школа 10 11 класс https://shkola-onlajn-52.ru
вывод из запоя в наркологическом стационаре вывод из запоя в наркологическом стационаре
Paragraph writing is also a excitement, if you be acquainted with after that you can write otherwise it is difficult to
write.
1xbet mobii https://1xbet-indir-1.com
поиск по номеру телефона онлайн kak-najti-cheloveka-po-nomeru-telefona-1.ru
1xbwt giri? https://www.1xbet-giris-77.com
As odds para apostas esportivas são muito melhores que as dos concorrentes.
https://latinosentoronto.info/author/eddypurton9287/
Steam Desktop Authenticator https://steamdesktopauthenticator.net is a popular solution for Steam users who need access to Steam Guard features on their computer. It conveniently verifies actions, protects your account, and manages authentication in a single app.
If you are going for best contents like I do, just go to see
this web page every day because it provides feature contents, thanks
Feel free to surf to my web blog :: iptv premium portugal (Don)
перепланировка квартиры в москве https://pereplanirovka-kvartir19.ru
врач капельница алкоголь на дом врач капельница алкоголь на дом
онлайн-школа для детей онлайн-школа для детей
капельницы от запоя на дому самара капельницы от запоя на дому самара
вывод из алкогольного запоя https://vyvod-iz-zapoya-na-domu-sankt-peterburg-18.ru
геопоиск по номеру телефона онлайн http://www.kak-najti-cheloveka-po-nomeru-telefona-2.ru
I’m amazed, I have to admit. Rarely do I encounter a blog that’s both educative and interesting,
and let me tell you, you have hit the nail on the head.
The problem is something not enough people are speaking intelligently about.
I’m very happy that I came across this in my search for something relating to this.
где купить карьерный песок песок карьерный цена за 1 м3
References:
Southpoint casino las vegas https://www.24propertyinspain.com/user/profile/1453485
Курсы ораторского мастерства http://www.kultura-rechi.ru для развития навыков общения и публичных выступлений. Практика, упражнения на дикцию, управление голосом, преодоление страха сцены и умение удерживать внимание слушателей.
Профессиональная юридическая кhttps://notary-krasnopeeva.ru/otzyvy-o-yuristah-po-zemelnomu-pravu/нсультация Пермь нотариус по вопросам дарения.
Поменялась ли стоимость услуг нотариуса Пермь 2026 по сраhttps://voprosnotariusu.ru/trudovoe-pravo-rol-yurista-v-krasnoyarske/нению с прошлым годом?
Смотрите график работы нотариусов Пермь перед выездом, у многих обед.
https://notarinfo.ru/gde-sdelat-perevod-dokumentov/
Предстоит оформление наследства у нотариуса Пермь, сhttps://notariusbryukhanova.ru/zayavlenie-ob-otsutstvii-braka-na-moment-priobreteniya-kvartiry/ираю документы по списку.
Нужен проверенный нотариус Индустриальный район Пермь, к комhttps://notary-krasnopeeva.ru/nasledovanie-imushhestva-perechen-dokumentov-dlya-oformleniya-u-notariusa/ лучше записаться?
онлайн школа 11 класс https://shkola-onlajn-51.ru
нарколога на дом москва https://www.reabilitaciya-alkogolikov-moskva.ru
Steam Desktop Authenticator https://steamdesktopauthenticator.net is a popular solution for Steam users who need access to Steam Guard features on their computer. It conveniently verifies actions, protects your account, and manages authentication in a single app.
Steam Desktop Authenticator https://sdasteam.com (SDA). It allows you to generate account login codes and automatically confirm trades or item sales on the Community Market without using your smartphone.
References:
Roulette flash https://pitts-jonasson-3.mdwrite.net/hitnspin-casino-ef-b8-8f-800-eur-200-fs-willkommensbonus
Финансовая защита при банкротстве — это комплекс мер, направленных на сохранение ваших законных прав и интересов. Переходите по запросу защита от коллекторов при банкротстве физического лица. Помогаем минимизировать риски потери имущества, защитить доходы и отстоять ваши интересы на всех этапах процедуры банкротства. Проводим правовой анализ ситуации, разрабатываем эффективную стратегию защиты и сопровождаем процесс до достижения результата. Консультация специалиста поможет найти оптимальное решение именно для вашей ситуации.
Steam Desktop Authenticator https://steamdesktopauthenticator.net is a popular solution for Steam users who need access to Steam Guard features on their computer. It conveniently verifies actions, protects your account, and manages authentication in a single app.
выведение из запоя в стационаре самара выведение из запоя в стационаре самара
Steam Desktop Authenticator https://steamdesktopauthenticator.net is a popular solution for Steam users who need access to Steam Guard features on their computer. It conveniently verifies actions, protects your account, and manages authentication in a single app.
Steam Desktop Authenticator https://steamdesktopauthenticator.net is a popular solution for Steam users who need access to Steam Guard features on their computer. It conveniently verifies actions, protects your account, and manages authentication in a single app.
Заказывали москитные сетки на заказ недорого, сделали за два дня, привезли и установили.
Also visit my page: https://ahtiar-nss.ru/zamena-uplotnitelya-na-oknah-pvh-v-nekrasovke/
Steam Desktop Authenticator https://sdasteam.com (SDA). It allows you to generate account login codes and automatically confirm trades or item sales on the Community Market without using your smartphone.
Информационный портал https://лзвв.рф с актуальными статьями, новостями, обзорами и полезными материалами на различные темы. Читайте интересные публикации о технологиях, финансах, здоровье, образовании, путешествиях и других сферах жизни.
Автозапчасти для тюнинга https://33sport.ru ВАЗ/Лада: подвеска, тормоза, выхлопные системы, элементы кузова и салона. Интернет-магазин предлагает качественные комплектующие для доработки и улучшения характеристик автомобиля.
Телекоммуникационное оборудование https://maxicord.ru кабель, СКС, инструменты и комплектующие для построения надежных сетей связи. Большой выбор продукции для монтажа, обслуживания и модернизации телекоммуникационной инфраструктуры любого масштаба.
Choosing the right siding for your house not only improves curb appeal but also protects against weather and moisture damage. Learn the key benefits in this complete guide.
займ на на карту онлайн займы без отказа
casino scores monopoly big baller today live free https://monopolylive-in.com/
взять займ онлайн https://dengi-nakartu.ru
Current Updates: Commercial Roof Installation – Premier USA Roofing
Семейный юрист https://semeinyi-urist-moskva.ru в Москве: развод, раздел имущества, алименты, определение места жительства детей. Опыт 20+ лет. Знаем и умеем делить ипотечные квартиры, бизнес, коммерческую недвижимость, ИИ и ООО. Индивидуальный подход. Конфиденциально.
Kitchen cabinets furniture custom cabinet manufacturer Tampa Bay
карьерный песок цена доставка стоимость карьерного песка
monopoly big baller results today india live free https://live-monopoly-in.com/
Otra opción muy popular son las giros gratuitos.
Estas te habilitan a jugar a tragamonedas determinadas
sin usar tu plata. Cuidado con el valor por giro
— a veces es muy simbólico y los premios son poco generosos.
капельница на дому цена капельница на дому цена
Наша служба доставки цветов в Томске привозит букеты в специальных контейнерах с водой, что гарантирует абсолютную свежесть. Оформите заказ онлайн и получите фото готовой работы перед отправкой.
https://oasisrealestateeg.com/author/phyllissterne/
Хотите купить свежие цветы в Томске? На сайте cvetaevatomsk.ru всегда в наличии огромный выбор элитных роз, пионов и гортензий с оперативной курьерской доставкой.
https://beshortlisted.com/employer/cvetaevatomsk/
В интернет-магазине Цветаева можно недорого купить розы, альстромерии, эустомы и гипсофилу с доставкой по Томску. К каждому заказу дарим открытку и средство для продления жизни цветов.
https://www.delcairn.co.za/author-profile/ykqtracey4704/
поставить капельницу от запоя поставить капельницу от запоя
Цветочный салон Цветаева предлагает заказать авторские букеты и композиции в шляпных коробках в Томске. Действует бесплатная доставка по городу при сумме заказа от 2500 рублей.
https://emmergencylocksmith.com/author-profile/roryx69985293/
Azərbaycanda ən populyar kazino saytlari arasında lider olan platformamızda qeydiyyatdan keçin və bonus qazanın. Geniş kazino oyunlari kataloqu, canlı dilerlər və unikal 1xbet kazino slotları sizi gözləyir. İndi kazino oyna və real pul qazanmaq şansını qaçırma!
My web page: https://kazino-1xbet-az.com/
buy rubles with usdt online exchange usdt to cash
обменять крипту на кеш без верификации обменник usdt на любую валюту
casino scores monopoly big baller today live https://live-monopoly-india.com/
monopoly big baller results india today live monopoly big baller results india today live .
monopoly result live today https://www.monopoly-live-india.com .
monopoly big baller live results monopoly big baller live results .
win big with monopoly live https://www.monopolylive-india.com .
casino scores monopoly live india casino scores monopoly live india .
выезд нарколога круглосуточно выезд нарколога круглосуточно
We recognize the value of your time, which is why we have incorporated a Turbo
Mode feature into Easy Videos Downloader.
Socolive là điểm đến lý tưởng dành cho những người yêu thích cá cược bóng đá và thể thao.
Với nền tảng hiện đại và uy tín hàng đầu, Socolive mang đến trải nghiệm cá cược trực tiếp
cùng link bóng đá chất lượng, giúp người chơi dễ
dàng theo dõi và đặt cược chính xác hơn.
Все подробности по ссылке: https://utepliteli-vrn.ru
Наша лучшая подборка: https://gazobeton163.ru
References:
Latest casino bonuses https://fkwiki.win/wiki/Post:Unsere_TopAuswahl_fr_Mobilgerte_LiveSpiele
Анализ сделок за последние 3 года перед банкротством поможет выявить операции, которые могут быть оспорены в рамках процедуры банкротства. Переходите по запросу анализ последних сделок за 3 года перед банкротство. Проводим комплексную проверку договоров, переводов имущества, платежей и других сделок на предмет рисков признания недействительными. Подготовим профессиональное заключение и рекомендации для защиты ваших интересов. Конфиденциально, оперативно и с учетом актуальной судебной практики.
вывод usdt в наличные онлайн вывести usdt наличными
Straight to the best here: https://blockchainreporter.net/net-worth/rob-reiner/
Only top materials: https://blockchainreporter.net/price-prediction/sofi-stock-price-prediction/
Полная версия статьи: https://avicenna-stroy.ru
нейросеть для презентаций http://litteraesvfu.ru
UU88 ⭐️ Trang Chủ UU88.Com TOP 1 Việt Nam | ĐK UU 88 +88K
комбинезон 176 http://detskie-kombinezony-kupit.ru
вызвать капельницу от запоя на дому вызвать капельницу от запоя на дому
капельница от алкоголя на дому капельница от алкоголя на дому
Стрийські новини https://stryi.in.ua актуальні події міста Стрий та регіону. Оперативна інформація про події, суспільне життя, культуру, економіку та важливі зміни. Слідкуйте за новинами, які відбуваються поряд із вами.
monopoly live game show http://www.monopoly-live-score.com .
Обязательно к прочтению: https://codos-baby.ru
наркологическая помощь на дому круглосуточно наркологическая помощь на дому круглосуточно
обивочная ткань для мебели https://tkan-dlya-mebeli.ru
заказ сувенирной продукции с логотипом http://suvenirnaya-produkcziya-s-logotipom-8.ru
Подробности на странице: https://spainslov.ru/site/word/word/%d0%94%d0%a0%d0%9e%d0%97%d0%94
Наша лучшая подборка: https://home-parfum.ru/products/chanel-allure-homme-sport-100-ml-oae/
капельница от запоя недорого https://kapelnicza-ot-pokhmelya-samara-39.ru
Нуждаете се спешно от пари в брой? Заложна къща Галерия 65 Варна предлага бързи заеми, обезпечени със злато, електроника, часовници и други ценности. Предлагаме конкурентни оценки на имоти, бърза обработка и професионално обслужване.
Whitecrest Resort https://whitecrestonline.com.au offers excellent conditions for relaxation and rejuvenation. Modern infrastructure, comfortable accommodations, active recreation, and a tranquil atmosphere create the perfect vacation setting.
Купить iPhone http://kupit-iphone43.ru в Нижнем Новгороде по выгодной цене с гарантией качества. В наличии популярные модели Apple, различные цвета и объемы памяти. Удобная оплата, доставка по городу, возможность покупки в кредит или рассрочку.
цветы круглосуточно москва цветы в цветочном магазине
вывод из запоя дешево самара вывод из запоя дешево самара
вывод из запоя цена наркология вывод из запоя цена наркология
сделать презентацию нейросеть litteraesvfu.ru
Дубликаты государственных номеров на авто в Москве доступны для заказа в кратчайшие сроки дубликат номера гос номера обращайтесь к нам для
получения надежной помощи и гарантии результата!
realcar realcar
вызвать врача нарколога на дом вызвать врача нарколога на дом
скачать melbet скачать melbet
Где купить стиральную машину https://stiralnye-mashiny-asko.ru ASKO в Москве — ТОП-10 официальных дилеров 2026 с актуальными ценами, гарантией производителя и фирменными шоурумами. В подборке представлены проверенные магазины и официальные представители бренда ASKO, где можно сравнить модели, получить консультацию специалистов, оформить доставку и заказать профессиональное подключение техники.
Займы под залог https://црс.рф ПТС автомобиля, спецтехники и недвижимости на выгодных условиях. Быстрое рассмотрение заявки, минимальный пакет документов и возможность получить необходимую сумму без длительных проверок. Финансовые решения для частных лиц и бизнеса.
скачать мелбет скачать мелбет
капельница на дому от запоя капельница на дому от запоя
комбинезон lapland http://www.detskie-kombinezony-kupit.ru
Хочешь сладкую клубнику? BerryGO свежая, сладкая и ароматная ягода для всей семьи. В наличии сезонная клубника высокого качества, выращенная с соблюдением стандартов свежести. Удобный заказ, выгодные цены и быстрая доставка
как выбрать индивидуальные https://telegra.ph/Idealnyj-balans-pochemu-vashemu-telu-nuzhny-individualnye-stelki-a-ne-standartnyj-plastik-06-05 ортопедические стельки и чем они лучше магазинного стандарта. Много ценных мыслей для тех, у кого часто устают ноги или есть проблемы с осанкой.
сувенирная продукция с логотипом москва suvenirnaya-produkcziya-s-logotipom-8.ru
Все про життя Полтави https://36000.com.ua новини, події, культура, дозвілля та міська інфраструктура. Корисний портал для тих, хто хоче бути в курсі актуальних подій та змін у місті.
анонимный вывод из запоя на дому недорого анонимный вывод из запоя на дому недорого
ткань для обивки дивана https://tkan-dlya-mebeli.ru
نه میخوام خیلی تعریف کنم نه
ردش کنم، فقط برداشت خودم بعد از بررسی
چند بخش سایت رو مینویسم. سلام دوستان، چون چند وقتیه درباره این فضا کنجکاو شدم گفتم اینجا هم نظرم رو ثبت کنم.
چند روز پیش وقتی یکی از دوستام درباره بازی انفجار حرف میزد چند بخش
این سایت رو نگاه کردم. وقتی چند قسمت رو دیدم متوجه شدم متنها خیلی پیچیده نیستن.
برداشت شخصی من اینه که در اینحوزه نباید
عجله کرد. یکی از بچهها بیشتر از همه روی امنیت و قابل فهمبودن
توضیحات حساس بود. برای همین من هم با دقت بیشتری بررسی کردم.
چیزی که باعث شد چند دقیقه بیشتر بمونم این بود که توضیحاتش خیلی پیچیده
نوشته نشده بود. ولی خب نباید فقط با یک کامنت نتیجهگیری کرد.
برای کسانی که قصد دارن چند سایت مختلف رو بررسی کنن،
میتونه برای آشنایی اولیه مفید باشه.
نکته دیگه اینکه نمونههایی مثل
وبسایت enfejaronline یا sibhbet معتبر دربین بعضی کاربران شناختهتر شدن.
من و یکی از دوستام مدتی قبل چند سایت
مختلف رو فقط از نظر ظاهر،
توضیحات و قابل فهم بودن بررسیکردیم و همین باعث شد به این چیزها حساستر بشم.
در مجموع به نظرم میشه به عنوان یک گزینه قابل بررسی بهش نگاه کرد.
فکر میکنم منطقیتره با دقت همه بخشها رو ببینه.
در پایان، برداشت من اینه که این سایت
برای بررسی اولیه میتونه مفید باشه، ولی تصمیم
نهایی همیشه باید با تحقیق شخصی و مقایسه چند گزینه گرفته بشه.
Also vіsit my wеb site وب سایت آموزشی (Margherita)
melbet melbet
зробити ремонт квартири скільки коштує ремонт квартири
Custom-made furniture production custom cabinets Tampa FL
геопоиск по номеру телефона онлайн kak-najti-cheloveka-po-nomeru-telefona-2.ru
چند وقت پیش با یکی از دوستام درباره این
فضا حرف میزدیم و همین باعث شد من هم
کمی دقیقتر دنبال اطلاعات
بگردم. سلام وقتتون بخیر، چون چند وقتیه درباره این فضا کنجکاو شدم گفتم اینجا هم نظرم
رو ثبت کنم. چند شب پیش وقتی دنبال مقایسه
چند سایت بودم به این سایت رسیدم.
در نگاه اول متوجه شدم متنها خیلی پیچیده نیستن.
برداشت شخصی من اینه که نباید فقط به ظاهر سایت
اعتماد کرد. یکی از همکارام بیشتر از همه
روی امنیت و قابل فهم بودن توضیحات حساسبود.
به همین خاطر چند بخش رو با حوصلهتر خوندم.
چیزی که برای من جالب بود که میشد راحتتر موضوع رو فهمید.
در عین حال بهتره کاربر قبل از هر
اقدامی خودش هم تحقیق کنه.
برای آدمهایی که تازه با این فضا آشنا شدن به موضوع کازینو آنلاین علاقه دارن، بهتره در
کنار چند گزینه دیگه بررسی بشه. به نظرم جالبه که نمونههایی مثل enfejаronline.net یا پلتفرم sibbet در بین بعضی
کاربران شناختهتر شدن. یکی از آشناهای من بیشتر دنبال پیشبینی ورزشی بود
و همیشه میگفت اگر سایتی توضیحات ساده وروشن نداشته باشه، بهتره آدم با احتیاط بیشتری جلو بره.
در یک نگاه کلی حداقل برای آشنایی اولیه میتونه مفید باشه.
اگرکسیقصد بررسی داره بهتره با دید باز و منطقی جلو بره.
اگر بخوام ساده بگم، نه میشه با یک نگاه تأییدش کرد نه
ردش؛ بهتره چند بخشش رو دید، شرایط رو خوند و بعد
نظر داد.
Here is my web-site: چالشها و اصول شرطبندی مسئولانه
мелбет казино скачать на андроид мелбет казино скачать на андроид
запой стационар цены запой стационар цены
Удобный каталог https://weblabo.ru онлайн-калькуляторов, конвертеров и полезных сервисов для быстрых расчетов. Здесь собраны инструменты для математики, финансов, строительства, IT и повседневных задач.
мелбет казино скачать мелбет казино скачать
мелбет мелбет
комб незон комб незон
نه میخوام خیلی تعریف کنم نه ردش کنم، فقط برداشت
خودم بعد از بررسی چند بخش سایت رو مینویسم.
درود، چون چند وقتیه درباره این فضا کنجکاو شدم گفتم اینجا هم نظرم رو ثبت کنم.
مدتی قبل وقتی داشتم تجربه بقیه کاربرا رو میخوندم این سایت رو بررسی کردم.
بعد از اینکه کمی توی سایت چرخیدم متوجه شدم
متنها خیلی پیچیده نیستن. از نظر من شفافیت اطلاعات خیلی مهمه.
یکی از رفیقام به اسم مهدی میخواست بدونه کدوم سایتها اطلاعات شفافتری دارن.
به همین خاطر چند بخش رو با حوصلهتر خوندم.
برداشت من این بود که برای کسی که تازه با این فضا آشنا میشه قابل فهم بود.
البته بهتره کاربر قبل از هر اقدامی
خودش هم تحقیق کنه. برای افرادی
که قصد دارن قبل از شروع اطلاعات
بیشتری داشته باشن میخوان قبل
از تصمیمگیری دید بهتری داشته باشن، این سایت
میتونه یکی از گزینههای بررسی باشه.
به نظرم جالبه که نمونههایی مثل
enfejɑronline در کنار sibbet آنلاین در بین بعضی کاربران شناختهتر شدن.
یکی از بچهها که اسمش امیر بود،
میگفت مشکل خیلی از سایتها اینه که فقط
شعارمیدن ولی توضیح درست نمیدن؛ برای همین من هم بیشتر به متنها دقت کردم.
در یک نگاه کلی برای شروع آشنایی بد نبود.
من پیشنهاد میکنم با دقت همه بخشها رو ببینه.
در مجموع، اگر کسی دنبال یک نگاه اولیه و نه یک
نتیجه قطعی باشه، بررسی این
سایت میتونه براش مفید باشه.
Feel free to sᥙrf to myy web page; تکنیکهای بک دور در پوکر آنلاین
мелбет скачать казино мелбет скачать казино
скачать мелбет казино на андроид скачать мелбет казино на андроид
Когда хотите найти любовь турецкий сериал в хорошем качестве без траты времени и подозрительных ресурсов, загляните в нашу подборку востребованных турецких сериалов. Здесь собраны как самые обсуждаемые новинки последних сезонов, а также известные хиты, которые любят миллионы зрителей. Зрители часто выбирают турецкие сериалы из-за захватывающих историй, харизматичным героям, атмосферным съемкам и насыщенной драматургии, способной увлечь с первой серии. Все проекты можно смотреть в хорошем качестве, без сложной регистрации и лишних действий.
single bet return calculator single bet return calculator .
Most calculators support decimal, fractional, and American odds.
ew double bet calculator https://single-betcalculator.com/bet-calculator/double/
It simplifies the process of determining potential winnings.
treble accumulator https://single-bet-calculator.uk/bet-calculator/accumulator/
odds in fractions https://singlebetcalculator.uk/odds-explained/
First, you enter your stake amount to begin calculations.
each way double calculator https://single-bet-calculator-free.com/bet-calculator/double/
Для тех, кто в теме, толковый разбор. Многие спрашивали, делюсь полезной ссылкой: скачать мелбет на айфон.
Сам сервис радует удобным интерфейсом, все интуитивно понятно даже новичку. Там еще трансляции матчей идут без задержек.
Для новых пользователей дают неплохой приветственный бонус, так что можно затестить. Всем удачи!
комбинезон для новорожденного летний http://www.detskie-kombinezony-kupit.ru
Народ, если кто искал, свежая инфа. Выкладываю, чтобы не потерялось, все работает без проблем здесь: мелбет скачать на айфон.
Сам сервис радует удобным интерфейсом, коэффициенты вполне адекватные. К тому же выплаты приходят достаточно быстро.
Для новых пользователей дают неплохой приветственный бонус, рекомендую воспользоваться. Пишите, если возникнут вопросы.
найти по номеру телефона человека найти по номеру телефона человека
запой стационар цены запой стационар цены
Чтобы быстро и эффективно официальный сайт, воспользуйтесь платформами которые не врут.
Знаете, многие лезут в дебри, а зря.
Однако часть таких сервисов требует оплаты и проверки легитимности.
Короче, не нарывайтесь.
Wow, wonderful weblog structure! How long have you been blogging for?
you make running a blog look easy. The full look of your site is wonderful, as smartly
as the content material!
транспортные перевозки автомобилей сколько стоит перевозка автомобиля
вывод из запоя в стационаре в санкт петербурге вывод из запоя в стационаре в санкт петербурге
Слушайте, реально замучилась искать нормальную платформу для дочки. Везде одна вода или заоблачные ценники. Соседка по площадке посоветовала глянуть вот этот проект: школы дистанционного обучения . Пришлось признать, что был не прав. Успеваемость подтянулась, особенно по точным наукам. Объясняют на пальцах, без лишней воды. Плюс огромный – никаких больничных, заболел – смотришь записи. Для современных детей самое то, ИМХО.
Мобильный туалет с отоплением московская область
Одежда для усопшего: традиции и современность
Справки различного назначения могут потребоваться для государственных учреждений, работодателей и учебных заведений. Мы предлагаем удобный сервис оформления документов – https://baza-spravki.com/svidetelstvo-o-brake/
Чтобы быстро и эффективно вычислить по номеру телефона, воспользуйтесь нормальными ребята реально помогают.
В общем, тема такая, не для паники.
Проверка разных платформ увеличивает шанс найти нужную информацию.
Короче, не нарывайтесь.
Слушайте, кому актуально, толковый разбор. Выкладываю, чтобы не потерялось, все работает без проблем здесь: мелбет казино скачать.
Кстати, площадка предлагает отличные условия для игроков, линия на футбол и теннис огромная. Порадовало, что можно ставить прямо в режиме реального времени.
Если только заводите аккаунт капает бонус на баланс, что очень даже кстати. Что думаете?
Чтобы быстро и эффективно узнать местонахождение по номеру телефона, воспользуйтесь такими штуками которые дают инфу.
Слушай, тут главное — без глупостей.
Непосредственное общение позволяет выяснить готовность человека делиться сведениями.
Короче, не нарывайтесь.
Уже отчаялся был найти хоть что-то стоящее. Знакомая многим фигня, нужно срочно проверить один подозрительный номер. Полез в глубокий поиск по веткам. И знаете что? Оказывается, сейчас есть реальные способы.
Короче, если вас сейчас волнует тот же самый вопрос — как вычислить анонимного абонента, то есть один реально работающий и живой сервис. Конкретно про то, как найти человека по номеру телефона — вот здесь всё максимально норм расписано: найти по телефону найти по телефону.
Я сам сначала вообще не верил во всё это. Потому что а тут выложена конкретная и структурированная информация. В общем, кому надо — тот точно воспользуется. Век живи — век учись, как говорится.
Давно присматривался к разным предложениям, где реально учат делу. Особенно когда речь про частную школу онлайн — тут ведь без фанатизма и воды. У меня сын как раз начал учиться дистанционно, так что пришлось перебрать кучу вариантов. В общем, вся подробная информация вот тут: online school https://shkola-onlajn-55.ru Я кстати ещё пару месяцев назад вообще думал, что это всё несерьёзно. Оказалось — реально работает. У них и программа грамотная. Сам теперь советую знакомым. Удачи!
Признаюсь, сначала очень сильно сомневался в этой затее, но после изучения реальных отзывов наткнулся на один рабочий и проверенный вариант. Если кратко, вот что я понял: современная онлайн-школа для детей — это уровень на порядок выше обычного. Там и программа насыщенная, без лишней воды, что очень радует на практике.
В общем, кому понимает толк в теме онлайн образование школа — убедитесь во всём сами, вот здесь все расписано в деталях: школы дистанционного обучения школы дистанционного обучения.
А я пока пойду дальше разбираться с расписанием. Потому что стандартный дистант бывает дико скучным для ребенка, а тут организована именно грамотно выстроенный учебный процесс. Пригодится точно, потом еще спасибо скажете.
live monopoly big baller live monopoly big baller .
Чтобы быстро и эффективно источник, воспользуйтесь такими штуками которые дают инфу.
В общем, тема такая, не для паники.
Социальные сети часто отображают номер в профилях или сообщениях.
Надеюсь, понятно объяснил.
Короче, наконец-то нашел нормальный разбор темы. Авторы реально шарят в вопросе, никаких банальных советов из интернета. Рекомендую заглянуть, чтобы не совершать глупых ошибок, как я в прошлый раз. Вот мел бет мел бет — советую изучить на досуге. Если останутся вопросы, пишите прямо там в комментариях, админ отвечает быстро.
подбор персонала услуги в области кадров
Current recommendations: מספר שירות ליווי
Народ, приветствую. Тема здоровья всегда на первом месте, потому что в экстренной ситуации трудно сориентироваться. Если ищете анонимного специалиста с быстрым выездом, то не рискуйте и не доверяйте случайным объявлениям.
Мы в свое время тоже столкнулись с этой бедой, чтобы помощь оказали без лишних хлопот и в спокойной атмосфере. Чтобы узнать точные цены и вызвать специалиста, советую посмотреть официальный источник: лечение алкоголизма последних стадий в спб лечение алкоголизма последних стадий в спб.
Там расписаны все аспекты, которые стоит учитывать, и помощь окажут полностью конфиденциально. Не теряйте время, кому-то тоже пригодится и спасет здоровье. Всем душевного спокойствия!
Признаюсь, сначала очень сильно сомневался в этой затее, но после советов хороших знакомых наткнулся на один действительно толковый вариант. Если кратко, вот что я понял: современная онлайн-школа для детей — это серьёзный и комплексный подход. Там и программа насыщенная, без лишней воды, что очень радует на практике.
В общем, кому реально нужно нормальное обучение в теме образовательные онлайн школы — посмотрите условия, вот здесь все разжевано до мелочей: lbs что это lbs что это.
Думаю, это как раз то, что сейчас нужно многим родителям. Потому что обычная школа часто проигрывает по всем фронтам, а тут организована именно частная школа онлайн. Советую не тянуть и сразу изучить тему.
Güvenli bahis deneyimi için 1xbet güncel adres adresini kullanabilirsiniz.
günümüzde oldukça basit. Bu siteye erişim için birkaç adım yeterlidir. Kullanıcılar giriş yapmak için doğru siteyi seçmelidir. SSL sertifikası ile güvenliğiniz sağlanır.
1xbet giriş ekranına ulaşmak için sayfanın üst kısmındaki giriş butonuna tıklanmalıdır. Doğru kullanıcı adı ve şifre girilmesi çok önemlidir. Her zaman resmi site olduğundan emin olunması gerekir.
Üyeliğiniz yoksa, kayıt işlemi birkaç dakika içinde tamamlanabilir. Kayıt formunda doğru ve güncel bilgilerin girilmesi tavsiye edilir. Doğrulama aşamasında telefon veya e-posta onayı gerekebilir.
Hesabınız aktif olduktan sonra çeşitli avantajlarınız olur. Bahisler, canlı casino ve diğer oyunlar gibi aktiviteler erişilebilir hale gelir. Kampanyalar hakkında bilgi alabilir ve fırsatları yakalayabilirsiniz.
Чтобы быстро и эффективно официальный сайт, воспользуйтесь платформами которые не врут.
В общем, тема такая, не для паники.
Отфильтровать результаты по дате публикации и типу источника помогает уточнить поиск.
Да, и ещё момент — без фанатизма.
Ребят, наконец-то разобрался с этой проблемой. Авторы реально шарят в вопросе, никаких банальных советов из интернета. Сам долго мучился, пока не нашел этот гайд. Вот мел бет мел бет — советую изучить на досуге. Мне лично это сэкономило кучу времени и нервов, так что делюсь от души.
помощь нарколога на дому при алкоголизме помощь нарколога на дому при алкоголизме
Heya i am for the first time here. I came across this board and I find It truly useful & it helped
me out much. I’m hoping to provide one thing back and help
others like you aided me.
Deneyip de begenen cok oldu. Surekli adres degisiyor. En sonunda guvenilir bir kaynak buldum.
Bu isin puf noktalar? var. Su an en h?zl? cal?san 1xbet guncel giris adresi tam olarak soyle: 1xbet giriş 1xbet giriş. Herkesin bildigi gibi — 1xbet guncel adres arayanlar buraya baks?n.
Site s?k s?k kapan?yor diyenlere inat. Kim ne derse desin — canl? destekleri bile h?zl?. Baska yerde aramay?n art?k…
Читать далее: https://duxi-365.ru
Лучшее прямо здесь: https://rikoremont.ru/company/read/149/
Честно говоря, долго выбирал, куда поступать, но после кучи долгих обсуждений наткнулся на один рабочий и проверенный вариант. Если кратко, вот что я понял: современная школа онлайн — это уровень на порядок выше обычного. Там и программа насыщенная, без лишней воды, так что прогресс виден сразу.
В общем, кому надоело искать среди кучи мусора в теме образовательные онлайн школы — убедитесь во всём сами, вот здесь все разжевано до мелочей: lbs что это lbs что это.
Если честно, даже не ожидал такого крутого качества. Потому что стандартный дистант бывает дико скучным для ребенка, а тут организована именно частная школа онлайн. Советую не тянуть и сразу изучить тему.
Ребята, привет! Я вообще в шоке, если честно. Поменяли газовую плиту, сдвинули раковину, а стены вообще вынесли — думал, пронесёт. В общем, теперь легализовывать этот бардак придётся официально. И тут встал вопрос: стоимость узаконивания перепланировки https://skolko-stoit-uzakonit-pereplanirovku-10.ru просто интересно, стоимость согласования перепланировки квартиры сейчас вообще реальная или грабёж. Или взносы в жилинспекцию за выдачу акта. Если кто недавно проходил это ад, поделитесь. Без этого всё равно потом квартиру не продать. Короче, нужна стоимость согласования перепланировки, реальная по рынку.
Приветствую всех участников. Слушайте, вопрос сложный, но многим может помочь, потому что в экстренной ситуации трудно сориентироваться. Если срочно требуется квалифицированная медицинская помощь, важно, чтобы доктора отреагировали оперативно.
Сам долго изучал отзывы и искал надежный вариант, и в итоге нашли клинику, где врачи работают профессионально. Если вам актуально или ситуация экстренная, можете ознакомиться по ссылке: выведение из запоя в стационаре выведение из запоя в стационаре.
Там расписаны все аспекты, которые стоит учитывать, так что найдете ответы на свои вопросы. Надеюсь, эта рекомендация и обращайтесь к настоящим профессионалам. Пусть все будет хорошо!
Ac?kcas? sas?rd?m kalitesine. Girdim c?kt?m derken zaman kaybettim. En sonunda guvenilir bir kaynak buldum.
Bu isin puf noktalar? var. Su an en h?zl? cal?san 1xbet guncel giris adresi tam olarak soyle: 1xbet türkiye 1xbet türkiye. Herkesin bildigi gibi — 1xbet guncel adres arayanlar buraya baks?n.
Sorunsuz baglant? icin bu link yeterli. Kim ne derse desin — cekim konusunda s?k?nt? yasamad?m. Gonul rahatl?g?yla girebilirsiniz…
Давно присматривался к разным предложениям, где реально учат делу. Особенно когда речь про онлайн-школу для детей — тут ведь нужна нормальная подача. У меня племянник как раз начал учиться дистанционно, так что намучились мы знатно. В общем, можете глянуть сами: онлайн образование школа онлайн образование школа Я кстати ещё раньше вообще думал, что это всё несерьёзно. Оказалось — зря сомневался. У них и программа грамотная. Доволен как слон, если честно. Надеюсь, поможет в выборе.
Per vivere l’adrenalina del Crazy Time nei casino italiani, visita dove giocare crazy time e scopri demo, statistiche e partite in diretta.
Scegliendo Crazy Time, gli utenti uniscono divertimento e prospettive concrete di vincita.
Se vuoi vivere l’emozione unica del gioco d’azzardo, non perdere l’occasione di provare crazy time sisal demo per scoprire il miglior intrattenimento casino in Italia!
Il Crazy Time Slot Casino Italy si e affermato come uno dei casino online maggiormente apprezzati. Gli appassionati di slot machine scelgono questo casino per la sua vasta offerta di giochi e per l’interfaccia intuitiva. La sicurezza e l’affidabilita sono elementi chiave che rendono questo casino una scelta ideale per chi desidera divertirsi senza preoccupazioni.
L’interfaccia utente e stata progettata per essere accessibile a tutti, anche ai principianti. Le animazioni fluide e gli effetti sonori aiutano a rendere il gioco piu emozionante e realistico. Grazie alla piena compatibilita con smartphone e tablet, il divertimento e garantito in movimento.
вызвать наркологическую помощь на дом вызвать наркологическую помощь на дом
crazy time payout https://crazytimeitalia-it.com/
storico crazy time https://crazytimeit-italia.com/
Arkadaslar uzun suredir ar?yordum. Surekli adres degisiyor. En sonunda dogru adrese ulast?m.
Bu isin puf noktalar? var. Su an en guncel cal?san 1xbet guncel giris adresi tam olarak soyle: 1xbet spor bahislerinin adresi 1xbet spor bahislerinin adresi. Yani k?sacas? — 1xbet guncel adres arayanlar buraya baks?n.
Denemek isteyen kac?rmas?n. Kim ne derse desin — canl? destekleri bile h?zl?. Gonul rahatl?g?yla girebilirsiniz…
It is always refreshing to come across content that actually takes the time to break down the subject matter so thoroughly without overcomplicating the core message you are trying to deliver to the readers here.
Шубы Турция — чем турецкие изделия отличаются от европейских
производитель ограждения 3д 3d забор производитель
панельное ограждение 3d купить 3d панели для забора
3д ограждения купить 3д панель для забора
Приветствую всех участников. Слушайте, вопрос сложный, но многим может помочь, так как в сети сейчас полно сомнительных клиник. Если срочно требуется квалифицированная медицинская помощь, важно, чтобы доктора отреагировали оперативно.
Знакомые вызывали бригаду в похожей ситуации в итоге вся ценная информация была собрана по крупицам. Если вам актуально или ситуация экстренная, вся информация есть здесь: вывод из запоя в стационаре в спб вывод из запоя в стационаре в спб.
Там расписаны все аспекты, которые стоит учитывать, так что найдете ответы на свои вопросы. Надеюсь, эта рекомендация кому-то тоже пригодится и спасет здоровье. Всем душевного спокойствия!
Слушайте, наконец-то разобрался с этой проблемой. Там всё разложено по полочкам, без лишней воды и тупых SEO-текстов. Сам долго мучился, пока не нашел этот гайд. Вот мелбет скачать на андроид бесплатно https://howtoairbrush.com — сохраняйте себе в закладки, пригодится. Мне лично это сэкономило кучу времени и нервов, так что делюсь от души.
Признаюсь, сначала очень сильно сомневался в этой затее, но после кучи долгих обсуждений наткнулся на один рабочий и проверенный вариант. Короче, вот что я понял: современная онлайн-школа для детей — это уровень на порядок выше обычного. Там и преподаватели живые и вовлеченные, что очень радует на практике.
В общем, кому надоело искать среди кучи мусора в теме онлайн образование школа — убедитесь во всём сами, вот здесь все расписано в деталях: онлайн-школа для детей онлайн-школа для детей.
А я пока пойду дальше разбираться с расписанием. Потому что без четкой системы в обучении сейчас вообще никуда, а тут организована именно грамотно выстроенный учебный процесс. Пригодится точно, потом еще спасибо скажете.
3d забор производитель 3д ограждение производитель
3д панели для забора ограждения 3d
Случайно наткнулся на один гайд, Прям беда реальная: нужно срочно проверить один подозрительный номер. Решил докопаться до истины и разобраться,. И знаете что? Тут главное знать, куда именно смотреть и какие базы юзать.
Короче, если вас сейчас волнует тот же самый вопрос — быстро определить владельца номера, то есть один реально работающий и живой сервис. Конкретно про то, как найти человека по номеру телефона — вот здесь всё максимально норм расписано: где находится телефон по номеру где находится телефон по номеру.
Я сам сначала вообще не верил во всё это. Потому что обычный поиск гуглит только рекламный спам. В общем, обязательно сохраните себе на будущее. Надеюсь, кому-то тоже упростит жизнь.
Давно хотел найти толковое место, где реально не грузят лишней теорией. Особенно когда речь про онлайн-школу для детей — тут ведь без фанатизма и воды. У меня дочка как раз перешел на удаленку, так что намучились мы знатно. В общем, вся подробная информация вот тут: онлайн образование школа онлайн образование школа Я кстати ещё раньше вообще думал, что это всё несерьёзно. Оказалось — реально работает. У них и обратная связь отличная. Сам теперь советую знакомым. Удачи!
ограждение 3d панели купить ограждение 3d панели цена
производители 3д ограждений 3 д заборы от производителя
Коллеги, всем привет! Встала задача обновить ассортимент брендированной атрибуки для отдела продаж. Посоветуйте нормальное изготовление корпоративных сувениров — чтобы и кружки не облазили, и ручки писали. сувениры с логотипом компании сувениры с логотипом компании А то насчитали мне за брендированные блокноты космос, хотя заказывали всего 50 позиций. Может, есть проверенные фабрики, которые работают напрямую, без посредников. А то маркетинговые агентства такой ценник лупят — закачаешься.
Ребята, привет! Соседи залили, решил сделать ремонт, а там. Акт скрытых работ потерял, да и проект сам переделывал. В общем, теперь легализовывать этот бардак придётся официально. И тут встал вопрос: сколько стоит узаконить перепланировку сколько стоит узаконить перепланировку говорят, согласование перепланировки квартиры цена сильно выросла после ужесточения норм. Или взносы в жилинспекцию за выдачу акта. Если кто недавно проходил это ад, поделитесь. Без этого всё равно потом квартиру не продать. Короче, просто сколько отдать, чтобы спать спокойно с новой планировкой.
References:
Pinnacle casino https://forum.exciteme.ca/author/buffettuba96//author/buffettuba96/
Народ, привет! Ох, уже голова болит с этим тимбилдингом, нужны нормальные презенты для партнеров. Присматриваюсь к подаркам с логотипом, но боюсь нарваться на кривую печать. сувенирная продукция под заказ https://suvenirnaya-produkcziya-s-logotipom-10.ru А то эти менеджеры по рекламе такие цены выкатывают — волосы дыбом. Просили ещё брендированные кружки и толстовки. А то я уже второй день в интернете сижу и ничего адекватного не нашёл.
3d ограждение купить 3 д забор
References:
Casino 77 https://liveheadline.site/item/lex-bedeutung-erkl-rung
забор 3д панели сетчатые ограждения 3д
Слушайте, наконец-то разобрался с этой проблемой. Всё расписано до мелочей, даже новичок поймет что к чему. Многие на форумах спорят, а ответ лежал на поверхности. Вот melbet скачать на андроид melbet скачать на андроид — советую изучить на досуге. Если останутся вопросы, пишите прямо там в комментариях, админ отвечает быстро.
Долго рылся в интернете на разных форумах, Знакомая многим фигня, постоянно звонят с незнакомого телефона, а кто — вообще непонятно. Стало дико интересно,. И знаете что? Не всё так сложно в этом плане, как кажется.
Короче, если вас сейчас волнует тот же самый вопрос — пробить странный входящий звонок, то есть один проверенный временем вариант. Конкретно про то, где найти по телефонному номеру актуальные данные — вот здесь всё максимально норм расписано: локатор по номеру телефона локатор по номеру телефона.
Я сам сначала вообще не верил во всё это. Потому что обычный поиск гуглит только рекламный спам. В общем, не теряйте свое время зря на разводняк. Век живи — век учись, как говорится.
Честно говоря, долго выбирал, направления для детей, но после советов хороших знакомых наткнулся на один нормальный человеческий вариант. К слову, вот что я понял: современная онлайн-школа для детей — это уровень на порядок выше обычного. Там и домашние задания с подробной индивидуальной проверкой, что очень радует на практике.
В общем, кому понимает толк в теме онлайн образование школа — убедитесь во всём сами, вот здесь все разжевано до мелочей: онлайн школа 8 класс онлайн школа 8 класс.
А я пока пойду дальше разбираться с расписанием. Потому что стандартный дистант бывает дико скучным для ребенка, а тут организована именно грамотно выстроенный учебный процесс. Держите этот вариант у себя в закладках.
Коллеги, всем привет! Срочно нужна консультация тех, кто уже заказывал мерч для бизнеса. Подскажите, где заказать качественную сувенирную продукцию с логотипом. корпоративные подарки с логотипом москва корпоративные подарки с логотипом москва Кто недавно брал подарки с логотипом под новогодние корпоративы, поделитесь контактами. Может, есть проверенные фабрики, которые работают напрямую, без посредников. Киньте ссылки или названия компаний, буду очень благодарен.
Если честно, сам перерыл кучу форумов в поисках нормальной ткани для мебели. Оказалось, что выбрать подходящий вариант совсем непросто. В общем, смотрите, вот здесь реально толково расписано про плотность, ворс и износостойкость для диванов и кресел, а главное — показаны варианты, которые легко чистить. Вся полезная информация доступна здесь: ткань для диванов https://tkan-dlya-mebeli-2.ru Дальше сами гляньте фактические отзывы. Да, и не берите первое, что попалось — я уже обжёгся, когда брал дешёвую ткань для обивки мебели. Эта тема реально вывозит по качеству. Кстати: ткань для обивки мебели купить лучше уже с нормальной пропиткой от грязи. Да и трётся такое полотно гораздо меньше. В общем, советую глянуть источник.
Мечтаешь о незабываемом отпуске? https://karta-abhazii.ru где величественные горы встречаются с бескрайним морем, а история оживает на каждом шагу, добро пожаловать в Абхазию!
Denemek isteyen arkadaşlara hep aynısını söylüyorum. Kapanan sitelerden çektim resmen anlatamam. Gerekli teknik incelemeleri tek tek tamamlayıp sistemi test ettim. Güvenilir bir kaynak bulmanın ne kadar zor olduğunu hepimiz biliyoruz işte size o adres: 1xbet güncel 1xbet güncel. Şimdi size doğru düzgün anlatayım — spor bahislerine meraklıysanız burası tam size göre.
bonusları bile fena değil действительно. Kendi adıma konuşuyorum size — kesinlikle pişman olacağınızı sanmıyorum deneyin. Umarım siz de memnun kalırsınız…
Bir arkadaş tavsiyesiyle başladım. Herkes farklı bir adres söylüyordu. Ama sonunda sağlam bir kaynağa denk geldim.
Bu işe yeni başlayanlar dinlesin. Sistem ayarlarını doğru yaptıktan sonra süreç çok basit. Giriş adresi tam olarak şurada: 1xbet güncel giriş 1xbet güncel giriş. Anlatacağım şu ki — 1xbet spor bahislerinin adresi burası.
Bonus sistemi bile tatmin edici. Başka yerlerde vakit kaybetmeyin — şikayet edecek bir şey bulamadım. Hayırlı olsun…
Случайно наткнулся на один гайд, Ситуация дурацкая, постоянно звонят с незнакомого телефона, а кто — вообще непонятно. Стало дико интересно,. И знаете что? Тут главное знать, куда именно смотреть и какие базы юзать.
Короче, если вас сейчас волнует тот же самый вопрос — быстро определить владельца номера, то есть один проверенный временем вариант. Конкретно про то, как узнать по мобильному кто именно звонил — вот здесь всё максимально норм расписано: местоположение человека по номеру телефона местоположение человека по номеру телефона.
Друзьям ссылку скинул в телегу, им тоже помогло. Потому что а тут выложена конкретная и структурированная информация. В общем, обязательно сохраните себе на будущее. Надеюсь, кому-то тоже упростит жизнь.
Давно искал инфу и наконец-то наткнулся на реальный опыт. Авторы реально шарят в вопросе, никаких банальных советов из интернета. Многие на форумах спорят, а ответ лежал на поверхности. Вот melbet скачать на андроид melbet скачать на андроид — сохраняйте себе в закладки, пригодится. Мне лично это сэкономило кучу времени и нервов, так что делюсь от души.
Коллеги, всем привет! Организуем встречу с дилерами, хочется сделать им приятные и полезные презенты. Подскажите, где заказать качественную сувенирную продукцию с логотипом. иллан гифтс иллан гифтс Где сейчас лучше заказывать корпоративные подарки сувениры — в России или все-таки из Китая везти. Бюджет пока не утвержден, поэтому хочу понять рыночные цены. А то маркетинговые агентства такой ценник лупят — закачаешься.
Знаете, ситуация бывает — человек в ступоре , а тащить в клинику просто нереально . Я сам через это прошёл пару лет назад . Руки опускаются, время идёт. Начинаешь обзванивать знакомых , а вокруг бабло тянут. Пока кто-то не подсказал один нормальный проверенный вариант. Требуется немедленная консультация — а везти самому нет возможности , то нужно вызывать врача на дом. Я про круглосуточный выезд нарколога. У нас в Самаре, если честно, тоже полно левых контор без лицензии. Вся проверенная информация ниже по ссылке: услуги врача нарколога на дому услуги врача нарколога на дому Честно скажу , после того как прочитал , понял, как правильно действовать. Там и про капельницы подробно , и про консультацию . Плюс анонимность — это важно . Рекомендую не откладывать.
Deneyen çok kişi duydum çevremde. Herkes farklı bir adres söylüyordu. Ama sonunda doğru adresi buldum işte.
Bu işe yeni başlayanlar dinlesin. Sistem ayarlarını doğru yaptıktan sonra süreç çok basit. Giriş adresi tam olarak şurada: 1xbet türkiye 1xbet türkiye. Anlatacağım şu ki — 1xbet spor bahislerinin adresi burası.
Bonus sistemi bile tatmin edici. Başka yerlerde vakit kaybetmeyin — şikayet edecek bir şey bulamadım. Şimdiden keyifli oyunlar…
Коллеги, всем привет! Срочно нужна консультация тех, кто уже заказывал мерч для бизнеса. Подскажите, где заказать качественную сувенирную продукцию с логотипом. company gifts company gifts Где сейчас лучше заказывать корпоративные подарки сувениры — в России или все-таки из Китая везти. Может, есть проверенные фабрики, которые работают напрямую, без посредников. А то маркетинговые агентства такой ценник лупят — закачаешься.
актерское мастерство для детей https://detskie-sekcii.ru
Брал перфоратор https://vse-instrumenti.ru перед оформлением поискал промокод все инструменты — нашёл на этом сайте. Код сработал, скинули 10%.
Если честно, сам перерыл кучу форумов в поисках нормальной обивки. Оказалось, что выбрать подходящий вариант реальная проблема. В общем, смотрите, вот здесь реально толково расписано про плотность, ворс и износостойкость для диванов и кресел, а главное — показаны варианты, которые не выцветают. Вся полезная информация доступна здесь: ткань для обивки ткань для обивки Дальше сами гляньте каталог с ценами. Да, и не берите первое, что попалось — я уже поплатился кошельком, когда брал ткань для мебели на распродаже. Эта тема реально вывозит по качеству. Имейте в виду: ткань мебельная купить лучше уже с нормальной пропиткой от грязи. Да и трётся такое полотно гораздо меньше. Здесь реально дельные советы.
Народ, привет! Ох, уже голова болит с этим тимбилдингом, нужны нормальные презенты для партнеров. Может, кто шарит где лучше брать сувенирную продукцию с логотипом. корпоративные подарки с логотипом компании корпоративные подарки с логотипом компании А то эти менеджеры по рекламе такие цены выкатывают — волосы дыбом. Нужно штук 300-500, но если будет норм цена, можем и больше взять. Заранее респект тем, кто откликнется с контактами проверенными.
Sürekli karşıma çıkıyordu ama denememiştim. Açıkçası önyargılıydım biraz. Sonra biraz araştırayım dedim.
Casino sevenler için biçilmiş kaftan. Detaylı incelemeleri tamamlayıp adımları takip ettikten sonra her şey netleşti. Giriş adresi işte karşınızda: 1xbet giriş 1xbet giriş. Kısacası durum ortada — 1xbet türkiye için tek doğru adres burası.
Hem hızlı hem güvenilir. Çok yere baktım emin olun — başka bir yere ihtiyacınız kalmaz. Şimdiden iyi eğlenceler…
Вот такая беда — родственник в запое , а везти в больницу нет сил. Моя семья такое пережила недавно. Руки опускаются, время идёт. Лезешь в интернет, а вокруг бабло тянут. Пока кто-то не подсказал один нормальный проверенный вариант. Требуется срочная помощь — а ехать куда-то нет возможности , то выход один . Речь конкретно про вызвать нарколога на дом . В Самаре , к слову , хватает шарлатанов . Нормальные контакты, кто реально приезжает вот тут : нарколог на дом цены нарколог на дом цены Откровенно говоря, после того как вник в детали, понял, как правильно действовать. И про снятие запоя на дому, и про консультацию . И цены адекватные, без разводов. Рекомендую не тянуть .
Welcome to Azimutbet https://21noticias.com/2026/06/09/what-is-sports-betting-and-why-is-it-so-popular-today/ a premium sports betting and gambling platform. Thousands of sports matches with extensive selections, live dealers, and the best licensed slot machines await you. Activate the bonus program, participate in VIP tournaments, and enjoy instant payouts with no hidden fees.
Ne zamandır böyle bir adres arıyordum. Kapanan sitelerden gına geldi artık. En sonunda güvendiğim bir kaynak buldum.
Spor bahislerinde gözünüz varsa burayı kaçırmayın derim. Gerekli tüm teknik kontrolleri yapıp adımları uyguladıktan sonra erişim açıldı. Giriş adresi tam olarak şurada: 1xbet güncel 1xbet güncel. Kısacası durum bu — 1xbet türkiye için tek geçerli adres burası.
Hiçbir sorun yaşatmadı bugüne kadar. Araştırmayı seven biriyim — en memnun kaldığım yer burası. Hayırlı olsun herkese…
автоматы на деньги
Do you love excitement? https://jerseysbeststore.com/licensing offers premium pre-match and live sports betting, as well as a legal online casino. Try your luck on modern slots, table games, or with live dealers. We guarantee complete data security, fair results, and 24/7 player support.
Срочно нужен совет кто уже заказывал партию к выставке. Хотим обновить мерч для сотрудников. Везде говорят про индивидуальный подход, но реально где заказать корпоративные подарки с логотипом компании — чтоб не за границей, но и не откровенный шлак. корпоративные сувениры на заказ корпоративные сувениры на заказ Говорят, что корпоративные подарки сувениры сейчас заказывают в основном в Китае, но боюсь за качество. Пока просто собираем инфу. Заранее спасибо, кто откликнется.
Если честно, сам перерыл кучу форумов в поисках нормальной ткани для мебели. Оказалось, что выбрать подходящий вариант совсем непросто. В общем, смотрите, вот здесь реально толково расписано про плотность, ворс и износостойкость для диванов и кресел, а главное — показаны варианты, которые не выцветают. Вся полезная информация доступна здесь: мебельные ткани https://tkan-dlya-mebeli-2.ru Дальше сами гляньте примеры в интерьере. Да, и не берите первое, что попалось — я уже обжёгся, когда брал дешёвую ткань для обивки мебели. Эта тема реально вывозит по соотношению цена-качество. Имейте в виду: ткань мебельная купить лучше уже с нормальной пропиткой от грязи. Да и садится такое полотно гораздо меньше. Здесь реально дельные советы.
Açıkçası ben de bulana kadar çok uğraştım. Kapanan sitelerden gına geldi artık. En sonunda güvendiğim bir kaynak buldum.
Spor bahislerinde gözünüz varsa burayı bir şans verin derim. Gerekli tüm teknik kontrolleri yapıp adımları uyguladıktan sonra erişim açıldı. Giriş adresi tam olarak şurada: 1xbet giriş 1xbet giriş. Kısacası durum bu — 1xbet spor bahislerinin adresi burada işte.
Çekimler konusunda da sıkıntı yok. Araştırmayı seven biriyim — başka aramaya gerek yok. Hayırlı olsun herkese…
Honestly, I’ve wasted so much time on sketchy rental deals around South Beach. Or worse — they freeze your credit card for an extra two grand and smile like it’s totally normal. Fool me once, shame on you, right. If you actually need a proper vehicle to cruise around the city, seriously, do your homework first and don’t just trust social media ads. Miami without a decent whip is pretty rough, especially if you want ice-cold AC and no ridiculous daily mileage caps.
Most of these local agencies are just fancy websites hiding a garbage fleet, but I eventually found a service with zero hidden fees and no bait-and-switch tactics. If you are looking for an honest source for premium rentals across Florida, check the details here: miami luxury car rentals miami luxury car rentals. Yeah, finding parking in downtown is still its own separate nightmare, but that’s on you. Anyway, at least there’s one trustworthy service left in this town, let me know if you guys know any other clean spots.
Kendi başıma araştırırken buldum. Herkes farklı bir adres söylüyordu. Ama sonunda doğru adresi buldum işte.
Bilenler zaten anlar. Sistem ayarlarını doğru yaptıktan sonra süreç çok basit. Giriş adresi tam olarak şurada: 1xbet türkiye 1xbet türkiye. Kısaca özet geçeyim — 1xbet türkiye için tek geçerli adres bu.
Bonus sistemi bile tatmin edici. Çok araştırdım emin olun — her şey düşünülmüş. Gözünüz arkada kalmasın…
Вот реально ситуация — родственник в тяжелом запое , а везти в клинику просто нереально . Моя семья такое пережила пару лет назад . Сидишь, не знаешь за что хвататься . Лезешь в интернет, а вокруг только деньги тянут. Пока кто-то не подсказал один реально работающий вариант. Если нужна срочная помощь — а везти самому просто нереально, то выход один . Речь конкретно про круглосуточный вызов нарколога . В Самаре , если честно, хватает шарлатанов . Нормальные контакты, кто реально приезжает вот тут : наркологи самары https://narkolog-na-dom-samara-14.ru Честно скажу , после того как вник в детали, многое прояснилось . Там и про капельницы подробно , и про консультацию нарколога . И цены адекватные, без разводов. Рекомендую не тянуть .
Do you love excitement? https://jerseysbeststore.com/licensing offers premium pre-match and live sports betting, as well as a legal online casino. Try your luck on modern slots, table games, or with live dealers. We guarantee complete data security, fair results, and 24/7 player support.
Ne zamandır böyle bir adres arıyordum. Kapanan sitelerden gına geldi artık. En sonunda güvendiğim bir kaynak buldum.
Spor bahislerinde gözünüz varsa burayı bir şans verin derim. Gerekli tüm teknik kontrolleri yapıp adımları uyguladıktan sonra erişim açıldı. Giriş adresi tam olarak şurada: 1xbet türkiye 1xbet türkiye. Özetle söylemek gerekirse — 1xbet türkiye için tek geçerli adres burası.
Hiçbir sorun yaşatmadı bugüne kadar. Araştırmayı seven biriyim — pişman olacağınızı sanmıyorum. Umarım işinize yarar…
Look, I’ve been around the block with these Miami car rentals. Or worse — they freeze your credit card for an extra two grand and smile like it’s totally normal. No thanks, I am completely done with that circus. If you actually need a proper vehicle to cruise around the city, seriously, do your homework first and don’t just trust social media ads. Everyone who lives here knows that having a solid car is essential, especially if you want ice-cold AC and no ridiculous daily mileage caps.
I’ve literally compared maybe 15 different local providers last month alone, but I eventually found a service with zero hidden fees and no bait-and-switch tactics. If you are looking for an honest source for premium rentals across Florida, check the details here: rental car in miami florida https://luxury-car-rental-miami-2.com. Oh, and definitely bring polarized sunglasses, because that Florida sun is absolutely no joke. Just drive safe out there and don’t let them upsell you on unnecessary insurance nonsense. hope this helps someone save a few bucks.
Слушайте, а вы в курсе, что найти нормальную клинику сейчас — это всегда целая проблема и головная боль. Нередко в жизни бывает так, когда родным или близким людям срочно понадобилась грамотная помощь врачей. И тут сразу возникает главный вопрос: куда именно везти человека?
Я сам недавно детально изучал этот вопрос, искал по-настоящему работающий и безопасный выход. В интернете сейчас столько мусора и дорвеев, что голова идет кругом. Короче говоря, советую присмотреться к одному источнику, там действительно раскладывают по полочкам всю подноготную про анонимное снятие запоя в условиях клиники. В такой ситуации лучше один раз внимательно глянуть самостоятельно, чтобы четко во всем разобраться.
Вся актуальная информация и контакты доступны прямо здесь: наркология вывод из запоя в стационаре спб http://narkologicheskij-staczionar-sankt-peterburg-12.ru. Сам сначала даже не думал, насколько там много полезных нюансов и скрытых факторов, и главное — там работают доктора, которые реально спасают людей. Для Санкт-Петербурга это точно один из самых лучших вариантов, так что рекомендую сохранить себе в закладки на всякий случай.
Если честно, сам перерыл кучу форумов в поисках нормальной мебельной ткани. Оказалось, что выбрать подходящий вариант реальная проблема. В общем, смотрите, вот здесь реально толково расписано про плотность, ворс и износостойкость для диванов и кресел, а главное — показаны варианты, которые не линяют. Вся полезная информация доступна здесь: ткань для мебели цены ткань для мебели цены Дальше сами гляньте каталог с ценами. Да, и не берите первое, что попалось — я уже поплатился кошельком, когда брал мебельную ткань купить с рук. Эта тема реально вывозит по соотношению цена-качество. Для информации: ткань для обивки мебели купить лучше уже с нормальной пропиткой от грязи. Да и садится такое полотно гораздо меньше. Не поленитесь, откройте.
bitcoin poker australia onlinepokerbitcoin.de .
Honestly, I’ve wasted so much time on sketchy rental deals around South Beach. Or worse — they freeze your credit card for an extra two grand and smile like it’s totally normal. Fool me once, shame on you, right. When you are trying to find a reliable premium fleet down here, make sure to check the actual fleet reviews before signing anything. Everyone who lives here knows that having a solid car is essential, whether you are heading to Brickell, Coconut Grove, or just driving down to Key Biscayne.
Most of these local agencies are just fancy websites hiding a garbage fleet, but I eventually found a service with zero hidden fees and no bait-and-switch tactics. If you are looking for an honest source for premium rentals across Florida, check the details here: rent a porsche near me https://luxury-car-rental-miami-2.com. Yeah, finding parking in downtown is still its own separate nightmare, but that’s on you. Just drive safe out there and don’t let them upsell you on unnecessary insurance nonsense. let me know if you guys know any other clean spots.
Знаете ситуацию реально бесит , когда близкий просто не может остановиться . Ломаешь голову , а вокруг одна потёмки . Знакомому потребовался срочный метод . Пьют успокоительное , но это не помогает . Нужно именно врачебное вмешательство . Пролистал пол-интернета , пока понял одну простую вещь: без круглосуточного наблюдения ничего не выйдет . В обычной квартире срыв гарантирован . Если ищешь где сделать вывода из запоя в стационаре — обрати внимание на один проверенный вариант . В Нижнем Новгороде , кстати, тоже полно шарлатанов . Лучше сразу перейти на сайт, где реально раскладывают по полочкам про кодирование от алкоголизма и работу нарколога . Подробности по ссылке: наркологическая клиника нижний новгород наркологическая клиника нижний новгород После прочтения , сам офигел , сколько нюансов в этой теме. Главное — анонимность и палаты. Для нашего города это проверенный временем вариант.
Портал о ремонте https://goodday.org.ua и строительстве с актуальной информацией о проектировании, отделке, инженерных системах и благоустройстве. Полезные материалы помогут выбрать качественные решения и избежать распространенных ошибок.
Информационный ресурс https://inbound.com.ua о ремонте и строительстве для владельцев недвижимости, мастеров и застройщиков. Практические инструкции, обзоры оборудования, советы экспертов и рекомендации по выполнению работ любой сложности.
Нужна бесплатная юридическая консультация? Переходите по запросу задать вопрос юристу онлайн без телефона в Зеленограде и получите помощь опытных правозащитников в любой области права: семейные споры, долги и кредиты, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации адвоката по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
ultimo crazy time ultimo crazy time .
tracksino crazy time live crazy-timeitalia.com .
Ремонт и строительство https://insurancecarhum.org от фундамента до отделки. Полезные статьи о строительных технологиях, материалах, инженерных коммуникациях и эффективных способах обустройства жилых и коммерческих помещений.
Дизайн и интерьер https://ukk.kiev.ua идеи для оформления квартир, домов и коммерческих помещений. Современные тенденции, советы дизайнеров, готовые решения и вдохновляющие проекты для создания стильного и комфортного пространства.
Все о дизайне https://bconline.com.ua интерьера в одном месте. Современные стили, идеи для ремонта, подбор мебели, освещения и отделочных материалов. Практические советы помогут создать уютное и функциональное пространство.
Ремонт и строительство https://oo.zt.ua без лишних сложностей. Подробные руководства, рекомендации специалистов, обзоры материалов и полезные идеи для создания надежного, красивого и функционального жилья.
Информационный ресурс https://it-cifra.com.ua о строительстве и ремонте с акцентом на реальные решения, проверенные технологии и практический опыт. Узнавайте, как строить надежно, ремонтировать качественно и экономить бюджет.
Народ, всем здравствуйте. Долго сомневался, где найти действительно крутой подарок. Перерыл кучу магазинов, но нормального премиального интернет магазина — раз два и обчёлся. А тут знакомый скинул. В общем, сам гляньте по ссылке: магазин элитных подарков магазин элитных подарков Кстати, если ищете дорогие подарки — там глаза разбегаются. Я себе присмотрел часы — качество бомба. И цены адекватные для такого уровня. Всем советую, кто ценит статусные вещи. Надеюсь, поможет.
Давно хотел найти надёжный вариант, честно говоря, много где в итоге разочаровался. Но прочитал реальные отзывы в тематическом канале про мелбет. Решил не полениться и затестить — и ни разу не пожалел,.
В общем, вся нужная инфа доступна вот тут: мелбет скачать мелбет скачать. Кстати, если кому надо скачать melbet — там всё работает стабильно и без глюков. Я себе установил софт прямо на телефон — никаких тормозов нет. И вывод денег действительно шустрый, Доволен как слон, честно говоря. Удачи всем на дистанции!
Полезный портал https://panorama.zt.ua о строительстве и ремонте с материалами по проектированию, отделочным работам, благоустройству участков и выбору строительных решений. Актуальная информация для профессионалов и частных застройщиков.
Строительный портал https://teplo.zt.ua для тех, кто планирует строительство дома, ремонт квартиры или модернизацию недвижимости. Актуальные статьи, обзоры технологий, советы специалистов и полезная информация для успешной реализации проектов.
Все о строительстве https://suli-company.org.ua и ремонте в одном месте. Строительный портал публикует полезные материалы о проектировании, отделке, инженерных системах, выборе строительных материалов и современных технологиях для дома и бизнеса.
Мужской портал https://cruiser.com.ua о стиле жизни, карьере, финансах, здоровье и технологиях. Полезные статьи, экспертные советы, обзоры и практические рекомендации для современных мужчин, стремящихся к развитию, успеху и комфортной жизни.
Портал о ремонте https://juglans.com.ua и строительстве с актуальными новостями отрасли, обзорами инструментов и строительных материалов. Практические руководства помогут выполнить работы качественно и избежать распространенных ошибок.
Друзья, всем здравствуйте. долго не решался завести аккаунт, но на прошлой неделе все-таки зарегился ради интереса в мелбет. Скажу так — залетел нормально и без проблем,. У кого новый айфон — тоже всё без проблем запускается,. Надо melbet скачать ios? Там всё делается максимально просто,.
Короче, сами гляньте все условия по ссылке: . Кстати, кто спрашивал про мелбет приложение — всё очень удобно и грамотно сделано. И фрибеты регулярно прилетают на баланс,. Я за месяц три раза выигрыш забирал — никаких косяков с выплатами нет,. Всем искренне рекомендую. Пользуйтесь на здоровье, пусть повезет!
Современный сайт https://makprestig.in.ua о ремонте и строительстве для тех, кто планирует строительство дома, реконструкцию или обновление интерьера. Экспертные советы, инструкции и практические решения для любых задач.
Портал о ремонте https://itstore.dp.ua и строительстве с обзорами материалов, инструментов и современных технологий. Узнайте, как правильно организовать строительные работы, выбрать подрядчиков и создать комфортное пространство.
Строительство домов https://zarechany.zt.ua ремонт квартир, инженерные системы и современные технологии — все это на одном информационном портале. Читайте экспертные статьи и находите практические решения для реализации своих проектов.
Строительный портал https://aziatransbud.com.ua с актуальными статьями о строительстве домов, ремонте квартир, современных технологиях и строительных материалах. Полезные советы, обзоры оборудования, инструкции и рекомендации для частных застройщиков и профессионалов отрасли.
Идеи для интерьера https://bathen.rv.ua советы дизайнеров и актуальные тренды оформления помещений. Сайт поможет подобрать стиль, материалы и решения для ремонта квартиры, дома или коммерческого объекта.
Let me save you some headache I learned the hard way. Half these local companies promise a custom Porsche and hand you a basic sedan with fake leather. Oh, and that pretty security deposit? Yeah, good luck getting that money back fast. Fool me thrice, shame on both of us I guess, lesson learned. When you are trying to find a reliable premium fleet down here, do some real digging first and read actual customer reviews. Anyone who lives here will tell you the exact same thing, whether you are doing Brickell mornings, South Beach nights, or a spontaneous Keys trip.
Most of these local agencies are just shiny websites hiding the same overpriced junk, until I finally found one outfit that actually delivers what’s in the photos. If you are looking for the only straight shooter for premium rentals across South Florida, check the details here: car rental miami florida https://luxury-car-rental-miami-3.com. Yeah, valet in Miami Beach will cost you an arm, but that’s not their fault. Anyway, glad there’s at least one honest rental joint left in this town, hope this helps some of you save a few bucks.
Народ, всем здравствуйте. Долго сомневался, где найти действительно крутой подарок. Перерыл кучу сайтов, но нормального магазина эксклюзивных товаров — реально мало. А тут по совету зашёл. В общем, все подробности и ассортимент вот тут: купить премиум подарки купить премиум подарки Кстати, если ищете дорогие подарки — там глаза разбегаются. Я себе присмотрел часы — упаковка люкс. И цены не космос. Сам теперь только там беру. Удачи с выбором!
Случается, когда уже не до раздумий — человек в ступоре , а везти в больницу нет сил. Я сам через это прошёл недавно. Руки опускаются, время идёт. Лезешь в интернет, а вокруг сплошной развод . Пока кто-то не подсказал один реально работающий вариант. Если нужна немедленная консультация — а везти самому нет возможности , то нужно вызывать врача на дом. Я про круглосуточный выезд нарколога. У нас в Самаре, к слову , хватает шарлатанов . Вся проверенная информация вот тут : вызов наркологической помощи на дом вызов наркологической помощи на дом Откровенно говоря, после того как прочитал , понял, как правильно действовать. Там и про капельницы подробно , и про последующее кодирование. Плюс анонимность — это важно . Советую не тянуть .
Все о ремонте https://intertools.com.ua и строительстве: от выбора фундамента до финишной отделки. Экспертные материалы, обзоры строительных технологий, рекомендации по подбору материалов и полезные советы для владельцев недвижимости.
Ребята, всем привет! долго выбирал нормальную платформу, но недавно таки зарегился ради интереса в mel bet. Честно? Остался полностью доволен,. Особенно если вам надо мелбет скачать на андроид — у меня модель достаточно бюджетная, но никаких тормозов вообще нет.
В общем, убедитесь сами, если перейдете: скачать мелбет на андроид скачать мелбет на андроид. Кстати, кто спрашивал про мелбет приложение — там всё сделано интуитивно понятно,. И бонусы на первый депозит отличные дают,. Я за месяц три раза деньги забирал — служба поддержки вообще не тупит. Сам теперь только туда. Удачи всем!
Look, I’ve been around the block with these Miami car rentals. You book a premium ride online, show up, and they hand you keys to something with a dented bumper. No thanks, I am completely done with that circus. When you are trying to find a reliable premium fleet down here, seriously, do your homework first and don’t just trust social media ads. Miami without a decent whip is pretty rough, whether you are heading to Brickell, Coconut Grove, or just driving down to Key Biscayne.
Most of these local agencies are just fancy websites hiding a garbage fleet, but I eventually found a service with zero hidden fees and no bait-and-switch tactics. If you are looking for an honest source for premium rentals across Florida, check the details here: exotic car rental miami exotic car rental miami. Yeah, finding parking in downtown is still its own separate nightmare, but that’s on you. Just drive safe out there and don’t let them upsell you on unnecessary insurance nonsense. let me know if you guys know any other clean spots.
Вот такой момент: подбор качественного стационара — это реально отдельная и очень сложная история. Многие лично сталкивались с такой ситуацией,, когда родным или близким людям срочно понадобилась грамотная помощь врачей. И в этот момент обычно начинается паника просто из-за банальной нехватки информации.
Я сам недавно детально изучал этот вопрос, искал по-настоящему работающий и безопасный выход. Очень сложно с ходу отличить реальные отзывы пациентов от банальной рекламы. Короче говоря, советую присмотреться к одному источнику, там подробно расписаны все важные условия и нюансы про круглосуточную наркологическую поддержку и условия проживания. В такой ситуации лучше один раз внимательно глянуть самостоятельно, чтобы четко во всем разобраться.
Вся актуальная информация и контакты доступны прямо здесь: лечение алкоголизма в стационаре спб https://www.narkologicheskij-staczionar-sankt-peterburg-12.ru. Сам сначала даже не думал, насколько там много подводных камней, на которые стоит обращать внимание, и главное — там работают доктора, которые реально спасают людей. В Питере это определенно достойный внимания и доверия медицинский центр, который стабильно работает и имеет хорошие отзывы.
Все об автомобилях https://avto-drug.com на одном автопортале. Свежие новости, обзоры машин, сравнения моделей, советы по обслуживанию, ремонту и выбору автомобиля. Полезный ресурс для владельцев авто и будущих покупателей.
Mobil bahise merak salalı çok oldu valla. Herkes farklı bir site öneriyordu kafam karıştı. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet android apk 1xbet android apk. Valla bak net söyleyeyim — mobil uygulaması inanılmaz akıcı aslında.
kurulumu da üç dakikadan kısa sürdü yani rahat olun. Kendi deneyimlerimi aktarıyorum size — kesinlikle pişman olmazsınız deneyin derim. Umarım siz de memnun kalırsınız…
Полезный строительный https://bastet.com.ua портал с материалами о строительстве, ремонте, дизайне интерьеров и благоустройстве территорий. Экспертные рекомендации, обзоры новинок рынка и практические решения для любых строительных задач.
игровые автоматы с выводом
Finding a proper ride in this city is a serious challenge. Half these local companies promise a custom Porsche and hand you a basic sedan with fake leather. You book a premium ride online, arrive all excited, then boom — hidden service fees everywhere. Fool me thrice, shame on both of us I guess, lesson learned. When you are trying to find a reliable premium fleet down here, do some real digging first and read actual customer reviews. Miami without wheels is basically a hostage situation, especially since the AC must be arctic and you want zero mileage games.
Most of these local agencies are just shiny websites hiding the same overpriced junk, until I finally found one outfit that actually delivers what’s in the photos. If you are looking for the only straight shooter for premium rentals across South Florida, check the details here: exotic car hire exotic car hire. Yeah, valet in Miami Beach will cost you an arm, but that’s not their fault. Anyway, glad there’s at least one honest rental joint left in this town, let me know if you guys have any other clean spots.
слоты с выводом денег
Народ, всем здравствуйте. Долго сомневался, где найти презент, который запомнят. Перерыл кучу вариантов, но нормального премиального интернет магазина — раз два и обчёлся. А тут наткнулся сам в обсуждении. В общем, все подробности и ассортимент вот тут: элитные подарки для мужчин элитные подарки для мужчин Кстати, если ищете премиум подарки — там глаза разбегаются. Я себе заказал ручку из лимитки — качество бомба. И цены не космос. Всем советую, кто ценит статусные вещи. Надеюсь, поможет.
Давно искал, где можно нормально играть, честно говоря, уже не верил в адекватные условия. Но случайно наткнулся на живое обсуждение про мел бет. Решил не полениться и затестить — и очень даже зашло,.
В общем, вся нужная инфа доступна вот тут: мелбет скачать мелбет скачать. Кстати, если кому надо скачать melbet — там нет никаких лишних телодвижений. Я себе установил софт прямо на телефон — полёт отличный. И бонусы на первый депозит приятные, Доволен как слон, честно говоря. Надеюсь, эта рекомендация кому-то пригодится.
игровые автоматы на реальные деньги
Android telefonumda rahatça oynamak istiyordum. Güvenilir bir kaynak bulmak gerçekten çok zordu. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet android apk 1xbet android apk. Şimdi size kısaca özet geçeyim — mobil versiyonu bile çok akıcı aslında.
Hiçbir gecikme yaşamadım şu ana kadar. Birçok uygulama denedim ama bunda karar kıldım — kesinlikle pişman olmazsınız deneyin derim. Şimdiden iyi şanslar ve bol kazançlar…
игровые автоматы на деньги
Полезный ресурс https://rkas.org.ua о ремонте и строительстве для тех, кто хочет создать комфортное и надежное жилье. Инструкции, экспертные советы, обзоры строительных материалов и практический опыт специалистов.
Строительный интернет-портал https://esi.com.ua с полезной информацией для владельцев недвижимости, строителей и ремонтных специалистов. Инструкции, обзоры материалов, советы экспертов и новости строительной отрасли.
Информационный автопортал https://autoinfo.kyiv.ua для водителей и автолюбителей. Обзоры автомобилей, новости производителей, рекомендации по уходу за машиной, выбору запчастей и безопасной эксплуатации транспортных средств.
Ремонт и строительство https://mramor.net.ua без лишних затрат. Обзоры материалов, строительных решений, технологий и оборудования. Практические советы помогут грамотно спланировать работы и получить качественный результат.
Автомобильный портал https://allauto.kyiv.ua с новостями, тест-драйвами и обзорами популярных моделей. Читайте о новых технологиях, электромобилях, рынке автомобилей и получайте полезные советы по эксплуатации транспортных средств.
Давно присматривался к разным платформам, честно говоря, перепробовал кучу сомнительных контор. Но случайно наткнулся на живое обсуждение про мел бет. Решил лично проверить систему — и ни разу не пожалел,.
В общем, вся нужная инфа доступна вот тут: мелбет казино скачать мелбет казино скачать. Кстати, если кому надо мелбет скачать — там процесс установки занимает буквально минуту. Я себе установил софт прямо на телефон — полёт отличный. И бонусы на первый депозит приятные, Сам теперь только туда захожу. Удачи всем на дистанции!
Telefonuma güvenle yükleyebileceğim bir apk bulmak istiyordum. Play Store’da resmi uygulama yok diye duydum. En sonunda güvendiğim bir kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet app android 1xbet app android. Valla bak net söyleyeyim — android uygulaması resmen harika çalışıyor.
Hiçbir hata almadım şu ana kadar. İşin doğrusunu söylemek gerekirse — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
Слушайте, кто шарит, долго присматривался к разным платформам, но вчера все-таки попробовал сделать пару ставок в мелбет. Скажу так — теперь я их постоянный клиент. У кого обычный андроид — тоже всё без проблем запускается,. Надо мелбет скачать на айфон? Там всё делается максимально просто,.
Короче, переходите, точно не пожалеете: . Кстати, кто спрашивал про скачать мелбет казино — всё очень удобно и грамотно сделано. И бонусы для новичков норм дают,. Я лично всё проверил на себе — никаких косяков с выплатами нет,. Сам теперь только туда захожу. Удачи всем!
Вот такая ситуация — близкий друг срывается , а просто бессилен. Моя семья столкнулась лично . Сначала кажется, что обойдётся , но хрен там. Нужна профессиональная медицина. Обзвонил десяток контор — одни обещания. А потом наткнулся на один действительно рабочий вариант. Ищешь где сделать качественное выведение из запоя с госпитализацией , не рискуй здоровьем. В Нижнем Новгороде , если честно, полно левых контор. Реальные контакты по ссылке ниже: наркологическая клиника нижний новгород наркологическая клиника нижний новгород Честно говоря , после того как ознакомился, многое прояснилось . И про кодировку от алкоголя подробно, и про выезд нарколога на дом . И цены адекватные. Советую не тянуть .
Telefonumdan rahatça bahis oynayabileceğim bir uygulama lazımdı. Sürekli farklı adresler veriliyordu kime inanacağımı şaşırdım. En sonunda doğru kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet app android 1xbet app android. Şimdi size kısaca özet geçeyim — telefonuma kurduktan sonra hiç takılma yaşamadım.
kurulumu da son derece basitti yani rahat olun. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
Знаете ситуацию реально бесит , когда близкий просто срывается в штопор . Ломаешь голову , а вокруг одна потёмки . Мне вот потребовался срочный выход . Пьют успокоительное , но это не помогает . Нужно именно врачебное вмешательство . Я перелопатил кучу сайтов , пока понял одну простую вещь: без нормальных условий ничего не выйдет . В обычной квартире срыв стопроцентный . Ищешь нормальный вариант для качественного вывода из запоя с помещением в клинику — обрати внимание на один проверенный вариант . В Нижнем , кстати, развелось этих “центров” . Советую перейти на сайт, где реально раскладывают по полочкам про кодирование от алкоголизма и работу нарколога . Вся суть здесь: психиатр нарколог нижний новгород психиатр нарколог нижний новгород Честно скажу , сам офигел , сколько подводных камней в этой теме. И кстати, цены адекватные. Для нашего города это проверенный временем вариант.
Mobil platform arayışım epey zaman aldı valla. Virüs bulaşır mı diye çok endişelendim açıkçası. En sonunda sağlam bir kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet app apk 1xbet app apk. Şimdi size kısaca özet geçeyim — android uygulaması gerçekten akıcı çalışıyor.
Hiçbir kasma yaşamadım şu ana kadar. Birçok apk denedim ama en iyisi bu çıktı — en güvenilir uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
казино играть
Güvenilir bir apk bulmak gerçekten işkenceydi valla. Herkes bir şey tavsiye ediyordu kafam allak bullak oldu. En sonunda güvendiğim bir adrese ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet app apk 1xbet app apk. Yani anlatmak istediğim şu — android uygulaması resmen süper çalışıyor.
Hiçbir sorun çıkmadı şu ana kadar. Birçok apk denedim ama en stabilı bu çıktı — en başarılı uygulama bu oldu artık. Herkese hayırlı olsun…
Android kullanıcısı olarak iyi bir uygulama çok önemli. Play Store’da arattım ama aradığımı bulamadım. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda sağlam bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet android apk 1xbet android apk. Valla bak net söyleyeyim — android uygulaması gerçekten akıcı çalışıyor.
kurulumu da çok hızlıydı yani rahat olun. Birçok apk denedim ama en iyisi bu çıktı — kesinlikle pişman olmazsınız deneyin derim. Şimdiden iyi şanslar ve bol kazançlar…
vodka casino официальный сайт зеркало водка бет зеркало актуальное
Mobil bahise merak salalı çok oldu valla. Play Store’da bulamayınca ne yapacağımı bilemedim. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet android 1xbet android. Yani anlatmak istediğim şu — android cihazlar için biçilmiş kaftan diyebilirim.
Hiçbir donma yaşamadım şu ana kadar. Birçok apk denedim ama bunda karar kıldım — başka yerde vakit kaybetmeyin yani. Herkese hayırlı olsun…
Слушайте, кто шарит, долго не решался завести аккаунт, но на днях все-таки зарегился ради интереса в мелбет. Скажу так — теперь я их постоянный клиент. У кого новый айфон — тоже всё без проблем запускается,. Надо скачать мелбет на айфон? В интерфейсе даже ребёнок разберётся.
Короче, сами гляньте все условия по ссылке: . Кстати, кто спрашивал про мелбет скачать приложение — мобильная версия работает без лагов,. И вывод средств действительно быстрый. Я уже выводил пару раз выигранные деньги — никаких косяков с выплатами нет,. Сам теперь только туда захожу. Удачи всем!
Mobil bahise ilgi duyalı çok oldu aslında. Virüslü dosya riski yüzünden çekindim açıkçası. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet apk son sürüm 1xbet apk son sürüm. Yani anlatmak istediğim şu — telefonuma kurduğuma çok memnunum.
bildirimleri de çok düzenli geliyor. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Umarım siz de memnun kalırsınız…
Знаете ситуацию выматывает , когда человек просто не может остановиться . Ломаешь голову , а вокруг одна реклама . Знакомому потребовался срочный выход . Пьют успокоительное , но это ерунда . Требуется именно врачебное вмешательство . Я перелопатил кучу сайтов , пока понял одну простую вещь: без нормальных условий ничего не выйдет . В обычной квартире срыв стопроцентный . Ищешь нормальный вариант для качественного вывода из запоя с помещением в клинику — тогда тебе сюда . В Нижнем , кстати, развелось этих “центров” . Советую перейти на сайт, где реально раскладывают по полочкам про кодирование от алкоголизма и работу нарколога . Подробности по ссылке: частные наркологические клиники нижний новгород частные наркологические клиники нижний новгород Честно скажу , сам удивился , сколько нюансов в этой теме. Главное — анонимность и палаты. Для Нижнего это реально стоящий вариант.
Подскажите, кто реально знает. Решил снести ненесущую стену между комнатами, Мосжилинспекция сразу завернёт любые несогласованные работы. Я уже знатно намучился со всей этой бюрократией, Короче говоря, единственное, что реально работает в наших реалиях — это доверить подготовку документов профессиональным инженерам, чтобы потом не было проблем со штрафами.
Они и все чертежи грамотно сделают, Обязательно сохраняйте себе эту полезную информацию: заказать проект перепланировки квартиры в москве https://proekt-pereplanirovki-kvartiry30.ru. Не тяните до последнего, Обязательно перешлите этот пост тому, кто тоже сейчас затеял ремонт!
Mobil platform arayışım epey zaman aldı valla. Play Store’da arattım ama son sürümü bulamadım. En sonunda sağlam bir kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet android uygulama 1xbet android uygulama. Şimdi size kısaca özet geçeyim — mobil versiyonu bütün özellikleri sunuyor.
yüklemesi de çok kolaydı yani rahat olun. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
Народ, слушайте — родственник начинает пить сутками, а ты не знаешь куда бежать . Моя семья с таким столкнулась недавно. Думал, справлюсь сам — хрен там было. Оказалось , без медикаментов и капельниц никак . Обзвонил все конторы в городе — одни обещания и бабло тянут. Пока нашёл один проверенный вариант. Если ищете где сделать вывод из запоя в стационаре — не ведитесь на дешёвые акции . У нас в Нижнем, кстати , хватает левых контор без лицензии. Вся проверенная информация ниже по ссылке: рехаб нижний новгород рехаб нижний новгород Честно скажу , после того как почитал , многое стало понятно . И про кодировку от алкоголя в Нижнем Новгороде, и про выезд нарколога на дом . Плюс анонимность — это важно . Советую не откладывать в долгий ящик.
Знаете, бывает — человек не может остановиться, а руки опускаются . Моя семья столкнулась лично . Сначала кажется, что обойдётся , но нет . Требуется профессиональная медицина. Обзвонил десяток контор — одни обещания. А потом наткнулся на один действительно рабочий вариант. Если тебе нужно вывод из запоя в стационаре , не ведись на дешёвые обещания . В Нижнем Новгороде , к слову , полно шарлатанов . Реальные контакты тут : частные наркологические клиники нижний новгород частные наркологические клиники нижний новгород Откровенно скажу, после того как прочитал , многое прояснилось . И про кодировку от алкоголя подробно, и про выезд нарколога на дом . Главное — анонимно . Советую не откладывать.
Android kullanıcısı olarak uzun zamandır arıyordum. Herkes farklı bir site öneriyordu kafam karıştı. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet yukle android 1xbet yukle android. Valla bak net söyleyeyim — android cihazlar için biçilmiş kaftan diyebilirim.
Hiçbir donma yaşamadım şu ana kadar. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
For anyone who knows the feeling of wanting a better haircut but not knowing how to describe it, this platform offers a more precise path. With one photo and a brief quiz, the system studies your features, hair characteristics, and daily context, then delivers 10 matched cuts together with a detailed barber guide. Behind the result is not a simple filter, but a mathematical model with 50+ style factors and 3D head mapping, designed to show how a cut fits. Instead of relying on a quick visual guess, the platform combines 50+ signals with 3D head mapping to show the logic behind the recommendation. The result is a photorealistic lookbook that feels close to a real photo, not a plastic mockup or a childlike filter. In addition, you get a clear haircut plan with practical parameters and stylist instructions, which helps turn the visual concept into an actual salon result. In just a few steps, you can move from a single photo to 10 matched options and a PDF report, with no sign-up friction. At a time when ordinary apps still feel like simple overlays, this feels more like a digital rendering of a new self than a playful toy. https://www.wantedly.com/id/hairpick_net
hello!,I like your writing very a lot! proportion we keep in touch extra approximately your post on AOL?
I need a specialist on this area to solve my problem. Maybe that’s you!
Having a look ahead to look you.
Android telefonumda rahatça oynamak istiyordum. Güvenilir bir kaynak bulmak gerçekten çok zordu. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet app apk 1xbet app apk. Şimdi size kısaca özet geçeyim — mobil versiyonu bile çok akıcı aslında.
kurulumu da son derece basitti yani rahat olun. Kendi deneyimlerimi aktarıyorum size — en sorunsuz çalışan uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
Android için güvenilir bir apk dosyası bulmak çok zordu valla. Sürekli farklı adresler veriliyordu kime inanacağımı şaşırdım. En sonunda doğru kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet download android 1xbet download android. Şimdi size kısaca özet geçeyim — telefonuma kurduktan sonra hiç takılma yaşamadım.
güncellemeleri otomatik yapıyor çok memnunum. İşin doğrusunu söylemek gerekirse — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
Знаете, достало уже — когда близкий человек начинает пить сутками, а ты не знаешь куда бежать . Моя семья с таким столкнулась недавно. Думал, справлюсь сам — нифига . Как показала практика, без медикаментов и капельниц не обойтись. Обзвонил все конторы в городе — сплошной развод . Пока нашёл один реально рабочий вариант. Кому нужно вывод из запоя в стационаре — не рискуйте здоровьем человека. У нас в Нижнем, если честно, хватает шарлатанов . Вся проверенная информация вот тут : частные наркологические клиники нижний новгород частные наркологические клиники нижний новгород Честно скажу , после того как почитал , расставил всё по полочкам. Там и про кодирование от алкоголизма подробно расписано , и про условия в стационаре и питание. Плюс анонимность — это важно . Рекомендую не тянуть .
Güvenilir bir apk bulmak gerçekten işkenceydi valla. Play Store’da resmi uygulama yok diye duyunca üzüldüm. En sonunda güvendiğim bir adrese ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet mobil apk 1xbet mobil apk. Şimdi size kısaca özet geçeyim — android uygulaması resmen süper çalışıyor.
Hiçbir sorun çıkmadı şu ana kadar. Birçok apk denedim ama en stabilı bu çıktı — kesinlikle pişman olmazsınız deneyin derim. Herkese hayırlı olsun…
Hello! I’m at work browsing your blog from my new iphone 3gs!
Just wanted to say I love reading your blog and look forward to all your
posts! Carry on the outstanding work!
any bitcoin poker sites https://www.online-poker-bitcoin.de .
888starbet https://888starzuz3.com/
888starzuz 888starzuz.
888starz login https://888starzuz5.com/
Народ, слушайте — родственник начинает пить сутками, а ты не знаешь куда бежать . Я сам через это прошёл недавно. Думали, уговорами поможем — нифига . Оказалось , без врачей и нормального наблюдения не обойтись. Перерыл кучу форумов — одни обещания и бабло тянут. А потом наткнулся на один проверенный вариант. Кому нужно качественное выведение из запоя с госпитализацией — не ведитесь на дешёвые акции . У нас в Нижнем, кстати , тоже полно шарлатанов . Нормальные контакты вот тут : кодировка от наркотиков кодировка от наркотиков Откровенно говоря, после того как почитал , расставил всё по полочкам. Там и про кодирование от алкоголизма подробно расписано , и про условия в стационаре и питание. И цены адекватные, без разводов. Советую не тянуть .
Android telefonum için kaliteli bir uygulama şart oldu. Play Store’da resmi uygulama yok diye duyunca üzüldüm. En sonunda güvendiğim bir adrese ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet yukle android 1xbet yukle android. Şimdi size kısaca özet geçeyim — mobil sürümü her şeyi düşünmüşler gerçekten.
Hiçbir sorun çıkmadı şu ana kadar. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Umarım siz de memnun kalırsınız…
Android cihazım için kaliteli bir uygulama şart oldu. Herkes farklı bir şey söylüyordu kime güveneceğimi bilemedim. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet indir apk 1xbet indir apk. Valla bak net söyleyeyim — mobil versiyonu her şeyi düşünmüş resmen.
kurulumu da üç dakikadan kısa sürdü yani rahat olun. Kendi deneyimlerimi aktarıyorum size — en başarılı uygulama bu oldu artık. Herkese hayırlı olsun…
Ситуация форс-мажор — человек в ступоре , а везти в больницу просто невозможно . Моя семья это пережила года два назад . Руки опускаются, а время тикает. Начинаешь обзванивать знакомых , а вокруг сплошной развод. Пока кто-то не подсказал один реально работающий вариант. Если нужна немедленная консультация — а ехать куда-то просто нереально, то выход один . Я про срочную наркологическую помощь на дому . У нас в столице, к слову , хватает левых контор без лицензии. Нормальные контакты, кто реально приезжает ниже по ссылке: капельница на дому анонимно капельница на дому анонимно Откровенно скажу, после того как вник в детали, понял, как правильно действовать. И про снятие запоя на дому, и про последующее кодирование. Плюс анонимность — это важно . Советую не откладывать.
Telefonumdan rahatça ulaşabileceğim bir uygulama lazımdı. Sürekli farklı linkler geliyordu kime inanacağımı şaşırdım. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda doğru kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet yükle android 1xbet yükle android. Şimdi size kısaca özet geçeyim — telefonuma kurduktan sonra çok rahatladım.
depolama alanı da fazla yemiyor gerçekten. Birçok apk denedim ama en iyisi bu çıktı — kesinlikle pişman olmazsınız deneyin derim. Herkese hayırlı olsun…
Знаете ситуацию достала уже , когда родственник просто не может остановиться . Ломаешь голову , а вокруг одна реклама . Знакомому потребовался действительно рабочий выход . Многие хватаются за таблетки , но это не помогает . Нужно именно врачебное вмешательство . Я перелопатил кучу сайтов , пока понял одну простую вещь: без нормальных условий ничего не выйдет . В обычной квартире срыв гарантирован . Ищешь нормальный вариант для вывода из запоя в стационаре — обрати внимание на один проверенный вариант . В Нижнем Новгороде , кстати, развелось этих “центров” . Советую перейти на сайт, где реально раскладывают по полочкам про кодирование от алкоголизма и выезд врача . Вся суть здесь: наркологическая помощь наркологическая помощь Честно скажу , сам офигел , сколько подводных камней в этой теме. И кстати, цены адекватные. Для Нижнего это проверенный временем вариант.
Народ, всем привет! Хочу объединить маленькую кухню с гостиной, без официального проекта даже думать нечего начинать, Я уже знатно намучился со всей этой бюрократией, В общем, нашел нормальных адекватных ребят, которые делают всё под ключ — это доверить подготовку документов профессиональным инженерам, чтобы потом не было проблем со штрафами.
И согласуют все этапы вообще без проблем. В общем, кому тоже актуально, проект на перепланировку квартиры заказать https://proekt-pereplanirovki-kvartiry30.ru. Без готового проекта даже не начинайте ломать стены, Обязательно перешлите этот пост тому, кто тоже сейчас затеял ремонт!
Mobile özel bir platform arıyordum uzun zamandır. Play Store’da arattım ama resmi olanı bulamadım. En sonunda doğru kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet indir apk 1xbet indir apk. Şimdi size kısaca özet geçeyim — telefonuma kurduktan sonra hiç takılma yaşamadım.
kurulumu da son derece basitti yani rahat olun. Kendi deneyimlerimi aktarıyorum size — kesinlikle pişman olmazsınız deneyin derim. Umarım siz de memnun kalırsınız…
Случается, когда уже не до раздумий — родственник сорвался , а тащить в больницу страшно . Моя семья такое пережила пару лет назад . Сидишь, не знаешь что делать . Начинаешь обзванивать знакомых, а в ответ одни отговорки. Пока случайно не наткнулся на один проверенный вариант. Если нужна срочная помощь — а ехать куда-то просто физически не можете, то нужно вызывать врача на дом. Я про срочную наркологическую помощь на дому . В Москве , кстати , хватает шарлатанов, которые тянут бабло . Вся проверенная информация вот тут : вызвать нарколога на дом вызвать нарколога на дом Откровенно говоря, после того как ознакомился с условиями, многое стало на свои места . Там и про капельницы расписано , и про последующее кодирование. Плюс анонимность — это важно . Советую не тянуть резину .
Вот такая ситуация — человек уходит в штопор , а просто бессилен. Моя семья столкнулась пару лет назад. Думаешь, сам справится, но нет . Нужна профессиональная медицина. Перерыл весь интернет — сплошной развод . Пока не нашёл один нормальный вариант. Ищешь где сделать экстренный вывод из запоя под наблюдением врачей , не рискуй здоровьем. У нас в Нижнем, к слову , тоже хватает шарлатанов . Проверенная информация по ссылке ниже: наркология нижний новгород наркология нижний новгород Откровенно скажу, после того как прочитал , многое прояснилось . Там и про кодирование от алкоголизма расписано , и про условия в стационаре. Главное — анонимно . Рекомендую не тянуть .
The concise yet comprehensive nature of this article makes it a fantastic resource. I truly value the methodical approach you took to ensure every single point was covered clearly.
Xxx video onlyfans sex video site
Telefonuma güvenle yükleyebileceğim bir apk bulmak istiyordum. Virüssüz bir apk bulmak gerçekten çileydi valla. En sonunda güvendiğim bir kaynağa ulaştım ve size de buradan bahsetmek istediğim nokta şurası: 1xbet mobil apk 1xbet mobil apk. Valla bak net söyleyeyim — telefonuma indirince kasma sorunu tamamen bitti.
boyutu da hafif gerçekten şaşırdım. Kendi deneyimlerimi aktarıyorum size — en güvenilir uygulama bu oldu artık. Şimdiden iyi şanslar ve bol kazançlar…
Подскажите, кто реально знает. Хочу объединить маленькую кухню с гостиной, а тут оказывается столько бумажек надо собрать, Потратил уйму свободного времени на чтение строительных форумов. Короче говоря, единственное, что реально работает в наших реалиях — сразу заказать техническое заключение у лицензированной компании, чтобы потом не было проблем со штрафами.
Они и все чертежи грамотно сделают, Смотрите сами, чтобы не наступать на мои грабли, проект на перепланировку квартиры заказать https://proekt-pereplanirovki-kvartiry30.ru. Не тяните до последнего, Обязательно перешлите этот пост тому, кто тоже сейчас затеял ремонт!
Знаете, ситуация — близкий ломается, а куда бежать — совсем не знаешь . Моя семья такое пережила пару лет назад . Думаешь, сам справится, но нет . Нужна реальная помощь . Перерыл весь интернет — одни обещания . А потом наткнулся на один действительно рабочий вариант. Нужна срочно анонимное лечение алкоголиков — не рискуй здоровьем близкого. У нас в Воронеже, если честно, хватает левых контор без лицензии. Реальные контакты ниже по ссылке: нарколог https://narkologicheskaya-pomoshh-voronezh-12.ru Честно скажу , после того как ознакомился, понял свои ошибки. И про кодирование, и про условия в клинике. Плюс работают круглосуточно — это важно . Советую не откладывать.
Случается сплошь и рядом — близкий друг не может остановиться, а ты не знаешь что делать . Я через это прошёл пару лет назад. Думаешь, сам справится, но хрен там. Нужна профессиональная помощь . Перерыл весь интернет — сплошной развод . Пока не нашёл один нормальный вариант. Если тебе нужно качественное выведение из запоя с госпитализацией , не рискуй здоровьем. У нас в Нижнем, если честно, тоже хватает шарлатанов . Проверенная информация тут : нарколог нижний новгород нарколог нижний новгород Откровенно скажу, после того как прочитал , многое прояснилось . Там и про кодирование от алкоголизма расписано , и про выезд нарколога на дом . И цены адекватные. Советую не откладывать.
Вот реально ситуация — родственник уходит в запой , а просто в тупике. Моя семья с таким столкнулась недавно. Думал, справлюсь сам — нифига . Как показала практика, без медикаментов и нормального наблюдения никак . Перерыл кучу форумов — одни обещания и бабло тянут. Пока нашёл один реально рабочий вариант. Кому нужно качественное выведение из запоя с госпитализацией — не ведитесь на дешёвые акции . У нас в Нижнем, кстати , хватает левых контор без лицензии. Нормальные контакты вот тут : вывод из запоя в стационаре вывод из запоя в стационаре Откровенно говоря, после того как вник в детали, расставил всё по полочкам. Там и про кодирование от алкоголизма подробно расписано , и про условия в стационаре и питание. И цены адекватные, без разводов. Советую не откладывать в долгий ящик.
Let me save you some serious time, learned this the hard way. Swear some of these “luxury” fleets down here should be in a museum instead of on the road. Plus the fine print says you can’t even drive outside the city limits without extra fees. Fool me four times? Not happening, lesson learned. When you genuinely need a proper and reliable premium ride to cruise around, skip the airport counters entirely. Any local will tell you the exact same thing about this city, especially since the AC must be ice cold and you want zero mileage games.
Most of these local agencies are just polished websites hiding the same overpriced junk, but I eventually found a service where what you book is exactly what you get, period. If you are looking for the only straight-up source for premium wheels in South Florida, check the current details here: luxury cars for rental luxury cars for rental. Yeah, parking in Brickell will cost you a small mortgage — but that’s city life. Just drive safe out there and maybe pass on that overpriced roadside assistance add-on. hope this helps some of you save a few bucks.
обучение йони массажу Профессиональное обучение тантрическому массажу в Казани откроет перед вами двери в мир осознанной чувственности. Станьте мастером, дарящим наслаждение.
Okay folks gather around because this Miami rental nightmare needs to be discussed. Then you show up at the local office and it’s a whole different story. Plus they want a surprise $2000 hold on your debit card right before giving you the keys. I’ve lived here for years and still get burned occasionally. When you’re after a trustworthy and reliable premium vehicle to cruise around, don’t just grab the cheapest option on Kayak. Miami without proper wheels is basically a hostage situation, whether you are doing Design District shopping, late-night South Beach cruising, or a spontaneous drive down to Homestead.
I’ve personally gone through maybe 30 rental companies across Dade, Broward, and Palm Beach, until I finally found one outfit that actually delivers what’s in the listing. If you are looking for the only honest broker for premium vehicles across South Florida, check the current availability here: porsche rental price https://luxury-car-rental-miami-5.com. Yeah, finding parking in Wynwood will test your patience — but that’s not on them. Anyway, glad there’s at least one straight shooter left in this rental jungle, hope this helps some of you save a few bucks.
Ребята, выручайте! Купил кресло б/у, каркас норм, но ткань в ужасном состоянии. Посоветуйте нормальную мебельную ткань для частого использования. купить материал для перетяжки мебели https://tkan-dlya-mebeli-1.ru Говорят, флок и микровелюр быстро вытираются, а рогожка лучше. Буду благодарен за любые советы, особенно от тех, кто сам перетягивал.
Никогда не думал, что столкнусь — близкий на грани, а везти в больницу просто невозможно . Моя семья это пережила совсем недавно. Сидишь, не знаешь за что хвататься . Лезешь в интернет, а вокруг сплошной развод. Пока кто-то не подсказал один нормальный проверенный вариант. Требуется срочная помощь — а самому везти просто нереально, то выход один . Речь конкретно про анонимный вызов врача нарколога на дом . У нас в столице, к слову , тоже полно левых контор без лицензии. Вся проверенная информация ниже по ссылке: помощь при запое нарколог на дом помощь при запое нарколог на дом Откровенно скажу, после того как вник в детали, понял, как правильно действовать. Там и про капельницы подробно , и про последующее кодирование. И цены адекватные, без разводов на месте. Рекомендую не откладывать.
Telefonumdan rahatça ulaşabileceğim bir uygulama lazımdı. Play Store’da resmi olanı bulamayınca üzüldüm. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda doğru kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet yükle android 1xbet yükle android. Şimdi size kısaca özet geçeyim — mobil sürümü bütün özellikleri eksiksiz sunuyor.
yüklemesi de basit ve hızlıydı yani rahat olun. İşin doğrusunu söylemek gerekirse — en hızlı uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
Swear I’ve seen it all by now, the rental landscape down here is crazy. You find a killer deal online — photos look pristine, price seems fair, terms almost reasonable. Different vehicle parked outside, curb rash on every rim, and that “all-inclusive rate”? Ha, doesn’t include the mandatory $300 cleaning fee or the $25 per day toll pass you can’t decline. Fool me six times? Yeah, Miami doesn’t care, lesson learned. When you genuinely need a legit and reliable premium ride to cruise around, do some real digging first and read actual customer reviews. Anyone who’s tried the bus here knows exactly what I mean about this city, whether you are doing South Beach dinner plans, Sunny Isles sunrise cruise, or a quick run down to the Florida Keys.
I’ve personally tested maybe 35 rental outfits across Dade, Broward, and Monroe, until I finally found one company that doesn’t play stupid games. If you are looking for the only trustworthy source for premium vehicles across South Florida, check the current details here: cadillac escalade rental near me https://luxury-car-rental-miami-6.com. Also, definitely bring serious shades unless you enjoy driving straight into the sun every single evening. Just drive safe out there and definitely skip that “damage waiver” upsell — total scam 99% of the time. hope this helps some of you save a few bucks.
Подскажите, кто реально знает. Затеял тут сложный ремонт в хрущёвке, а тут оказывается столько бумажек надо собрать, Потратил уйму свободного времени на чтение строительных форумов. В общем, единственное, что реально работает в наших реалиях — это доверить подготовку документов профессиональным инженерам, чтобы спать спокойно и не бояться проверок от управляющей.
И в жилищную инспекцию документы подадут В общем, кому тоже актуально, проект перепланировки квартиры проект перепланировки квартиры. Иначе потом прилетит огромный штраф и суды заставят всё вернуть как было. Обязательно перешлите этот пост тому, кто тоже сейчас затеял ремонт!
Знаете, ситуация — человек в запое , а что делать — совсем не знаешь . Моя семья такое пережила пару лет назад . Сначала кажется, что обойдется , но хрен там. Нужна профессиональная помощь . Перерыл весь интернет — одни обещания . Пока не нашел один нормальный вариант. Нужна срочно круглосуточная наркологическая служба — не рискуй здоровьем близкого. У нас в Воронеже, кстати , хватает левых контор без лицензии. Реальные контакты тут : нарколог https://narkologicheskaya-pomoshh-voronezh-12.ru Откровенно говоря, после того как прочитал , понял свои ошибки. И про кодирование, и про условия в клинике. Плюс работают круглосуточно — это важно . Советую не тянуть .
Telefonumda bahis keyfini çıkarmak istiyordum uzun zamandır. Virüslü bir dosya indirmekten çok korktum açıkçası. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet android 1xbet android. Şimdi size kısaca özet geçeyim — telefonuma kurduğum için çok mutluyum.
kurulumu da oldukça basitti yani rahat olun. Birçok apk denedim ama en stabilı bu çıktı — başka yerde vakit kaybetmeyin yani. Herkese hayırlı olsun…
Знаете, бывает — близкий друг уходит в штопор , а ты не знаешь что делать . Моя семья столкнулась лично . Сначала кажется, что обойдётся , но нет . Требуется реальная помощь . Обзвонил десяток контор — одни обещания. А потом наткнулся на один нормальный вариант. Ищешь где сделать качественное выведение из запоя с госпитализацией , не рискуй здоровьем. В Нижнем Новгороде , если честно, тоже хватает левых контор. Реальные контакты тут : кодировка от наркотиков кодировка от наркотиков Откровенно скажу, после того как ознакомился, многое прояснилось . И про кодировку от алкоголя подробно, и про условия в стационаре. Главное — анонимно . Рекомендую не тянуть .
Народ, слушайте — когда близкий человек уходит в запой , а ты не знаешь куда бежать . Я сам через это прошёл года два назад . Думал, справлюсь сам — нифига . Оказалось , без врачей и нормального наблюдения не обойтись. Обзвонил все конторы в городе — сплошной развод . Пока нашёл один реально рабочий вариант. Кому нужно экстренный вывод из запоя под круглосуточным наблюдением — не рискуйте здоровьем человека. У нас в Нижнем, кстати , тоже полно шарлатанов . Нормальные контакты ниже по ссылке: наркологические клиники в нижнем новгороде наркологические клиники в нижнем новгороде Честно скажу , после того как вник в детали, расставил всё по полочкам. И про кодировку от алкоголя в Нижнем Новгороде, и про условия в стационаре и питание. Плюс анонимность — это важно . Советую не тянуть .
Seriously, the amount of garbage “luxury” deals down here is astonishing. You see a sweet ride online — clean spec, fair price, looks legit. Plus they want a surprise $2000 hold on your debit card right before giving you the keys. Fool me five times? Actually yeah, Miami keeps fooling everyone, lesson learned. If you are trying to find a legitimate luxury fleet without getting ripped off, do some real digging first and read actual customer reviews. Ask anyone who’s tried Ubering across the 305 during rush hour, especially since the AC must freeze your teeth and you want unlimited miles or bust.
Most of these local agencies are just smoke and mirrors with decent SEO hiding overpriced junk, until I finally found one outfit that actually delivers what’s in the listing. If you are looking for the only honest broker for premium vehicles across South Florida, check the current availability here: porsche 911 carrera for rent near me https://luxury-car-rental-miami-5.com. Also, definitely bring quality shades unless you enjoy driving into a nuclear flare every single evening. Anyway, glad there’s at least one straight shooter left in this rental jungle, let me know if you guys have any other clean spots.
Let me save you some serious time, learned this the hard way. Swear some of these “luxury” fleets down here should be in a museum instead of on the road. Plus the fine print says you can’t even drive outside the city limits without extra fees. Fool me four times? Not happening, lesson learned. When you genuinely need a proper and reliable premium ride to cruise around, skip the airport counters entirely. Miami without a decent whip is basically a punishment, whether you are doing Coral Gables brunch, South Beach night run, or a spontaneous Everglades detour.
I’ve personally tested maybe 25 rental outfits across Dade and Broward, but I eventually found a service where what you book is exactly what you get, period. If you are looking for the only straight-up source for premium wheels in South Florida, check the current details here: mercedes for rent near me https://luxury-car-rental-miami-4.com. Also, definitely bring polarized shades unless you enjoy driving completely blind into the sunset. Just drive safe out there and maybe pass on that overpriced roadside assistance add-on. hope this helps some of you save a few bucks.
Знаете, бывает такое — близкий на грани, а тащить куда-то страшно . Моя семья это пережила совсем недавно. Руки опускаются, а время тикает. Начинаешь обзванивать знакомых , а вокруг сплошной развод. Пока кто-то не подсказал один реально работающий вариант. Если нужна немедленная консультация — а ехать куда-то просто нереально, то выход один . Речь конкретно про выезд нарколога круглосуточно. В Москве , если честно, хватает шарлатанов . Нормальные контакты, кто реально приезжает ниже по ссылке: скорая наркологическая помощь на дому москва скорая наркологическая помощь на дому москва Честно говоря , после того как прочитал , многое прояснилось . И про снятие запоя на дому, и про консультацию нарколога . Плюс анонимность — это важно . Советую не откладывать.
Ребята, выручайте! Купил кресло б/у, каркас норм, но ткань в ужасном состоянии. Посоветуйте нормальную мебельную ткань для частого использования. ткань для обивки дивана https://tkan-dlya-mebeli-1.ru Говорят, флок и микровелюр быстро вытираются, а рогожка лучше. Буду благодарен за любые советы, особенно от тех, кто сам перетягивал.
Знаете, бывает ситуация — близкий в тяжелом состоянии, а везти в клинику страшно . Моя семья такое пережила пару лет назад . Руки опускаются, а время идет. Хватаешься за телефон , а в ответ тишина . Пока кто-то не посоветовал один реально работающий вариант. Если нужна срочная помощь — а тащить человека сам просто физически не можете, то выход один . Речь про анонимный вызов врача нарколога на дом . У нас в столице, если честно, тоже полно левых контор без лицензии. Вся проверенная информация вот тут : анонимный вызов нарколога анонимный вызов нарколога Откровенно говоря, после того как прочитал , понял, как действовать правильно. Там и про капельницы расписано , и про консультацию нарколога . Плюс анонимность — это важно . Рекомендую не тянуть резину .
Знаете, ситуация — близкий ломается, а куда бежать — совсем не знаешь . Я сам через это прошел пару лет назад . Сначала кажется, что обойдется , но нет . Требуется профессиональная медицина. Перерыл весь интернет — только деньги тянут. А потом наткнулся на один действительно рабочий вариант. Если ищешь где получить анонимное лечение алкоголиков — не рискуй здоровьем близкого. У нас в Воронеже, если честно, тоже полно левых контор без лицензии. Вся проверенная информация тут : наркологическая клиника в воронеже наркологическая клиника в воронеже Честно скажу , после того как прочитал , понял свои ошибки. Там и про вывод из запоя , и про условия в клинике. Плюс работают круглосуточно — это важно . Советую не тянуть .
Народ, всем привет! Нужно немного сдвинуть мокрую зону санузла. Мосжилинспекция сразу завернёт любые несогласованные работы. Я уже знатно намучился со всей этой бюрократией, В общем, нашел нормальных адекватных ребят, которые делают всё под ключ — это доверить подготовку документов профессиональным инженерам, чтобы спать спокойно и не бояться проверок от управляющей.
Сами полностью проект подготовят, Там на сайте есть и примеры документов, и точные цены, проект перепланировки и переустройства квартиры проект перепланировки и переустройства квартиры. Не тяните до последнего, Обязательно перешлите этот пост тому, кто тоже сейчас затеял ремонт!
Mobil platform arayışım epey meşakkatli geçti valla. Play Store’da arattım ama son sürümü göremedim. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet yukle android 1xbet yukle android. Valla bak net söyleyeyim — android uygulaması inanılmaz akıcı çalışıyor.
batarya performansı da gayet iyi. Kendi deneyimlerimi aktarıyorum size — en güvenilir uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
Been burned enough times to write a book on this nonsense. You spot a sweet deal online: shiny Mercedes, low daily rate, looks perfect. Plus a surprise $2000 hold on your card and a $35 per day GPS you never asked for right before giving you the keys. Seven years in South Florida and I still almost fall for these tricks. If you are trying to find a legitimate luxury fleet without getting ripped off, avoid the airport like the plague. Anyone who’s taken the Metro here knows the struggle about this city, especially since the AC must freeze your face off and unlimited miles or forget it.
Most of these local agencies are just fancy websites hiding the same beat-up fleet with bought reviews, until I finally found one outfit that actually delivers what’s promised. If you are looking for the only straight shooter for premium rides across South Florida, check the current details here: porsche 911 carrera for rent near me https://luxury-car-rental-miami-7.com. Yeah, parking in Brickell will cost you a nice steak dinner — but that’s just Miami life. Just drive safe out there and definitely pass on that “tire protection” upsell — total garbage. hope this helps some of you save a few bucks.
Знаете, ситуация — близкий подсел на иглу, а что делать — просто тупик. Я через это прошел лично . Пьют успокоительное, но нет . Требуется реальная медицина. Обзвонил десяток контор — сплошной развод . Пока не нашел один нормальный вариант. Если ищешь где получить круглосуточная наркологическая помощь — не ведись на дешевые акции . У нас в Воронеже, если честно, тоже полно левых контор без лицензии. Вся проверенная информация тут : лечение наркозависимости воронеж https://narkologicheskaya-pomoshh-voronezh-11.ru Откровенно говоря, после того как прочитал , многое прояснилось . Там и про вывод из запоя , и про реабилитацию . И цены адекватные. Рекомендую не откладывать.
Никогда не думал, что столкнусь — человек в ступоре , а везти в больницу просто невозможно . Моя семья это пережила года два назад . Сидишь, не знаешь за что хвататься . Начинаешь обзванивать знакомых , а вокруг сплошной развод. Пока кто-то не подсказал один реально работающий вариант. Если нужна немедленная консультация — а самому везти нет физической возможности , то нужно вызывать врача. Речь конкретно про анонимный вызов врача нарколога на дом . У нас в столице, к слову , тоже полно шарлатанов . Вся проверенная информация вот тут : неотложная наркологическая помощь на дому неотложная наркологическая помощь на дому Откровенно скажу, после того как вник в детали, многое прояснилось . И про снятие запоя на дому, и про последующее кодирование. Плюс анонимность — это важно . Рекомендую не тянуть .
инструктор по йони массажу Казань Ищете качественный вебинар по эротическому массажу в Казани? Наши эксперты помогут вам освоить все тонкости этого искусства для достижения глубокой близости.
The tone of this post feels thoughtful and well-measured, helping create a positive atmosphere for discussion and respectful interaction online.
在线购买无处方安定片 xxx Pornhub
Okay folks gather round — Miami rental horror story time. Then you roll up to the local address to pick up the car. Different car sitting there — bald tires, dashboard lit up like a Christmas tree, and that “killer price”? Yeah doesn’t include the non-negotiable $45 daily insurance or the $500 deposit they forget to mention. Nine years in South Florida and these clowns still nearly fool me. If you are trying to find a legitimate luxury fleet without getting ripped off, do some real digging first and read actual customer reviews. Miami without proper wheels is basically a nightmare, especially since the AC must freeze your teeth and unlimited miles or no deal.
Most of these local agencies are just polished turds with fake five-star reviews hiding overpriced junk, but I eventually found a service where what you reserve is exactly what you get, period, end of story. If you are looking for the only trustworthy source for premium rides across South Florida, check the current details here: car hire miami beach florida https://luxury-car-rental-miami-9.com. Also, definitely bring polarized shades unless you enjoy driving blind into the sunset every single night. Just drive safe out there and definitely skip that “emergency roadside” upsell — complete waste of money. hope this helps some of you save a few bucks.
Ребята, выручайте! Купил кресло б/у, каркас норм, но ткань в ужасном состоянии. Посоветуйте нормальную мебельную ткань для частого использования. ткань для мебели купить в москве ткань для мебели купить в москве А то везде пишут разное, а на деле хочется купить ткань мебельную и забыть на пару лет. Нужен метров 15-20, может, кто знает нормального поставщика.
Swear I’ve seen it all by now, the rental landscape down here is crazy. You find a killer deal online — photos look pristine, price seems fair, terms almost reasonable. Plus they slap a surprise $2500 hold on your card for good measure right before giving you the keys. Fool me six times? Yeah, Miami doesn’t care, lesson learned. When you genuinely need a legit and reliable premium ride to cruise around, do some real digging first and read actual customer reviews. Anyone who’s tried the bus here knows exactly what I mean about this city, whether you are doing South Beach dinner plans, Sunny Isles sunrise cruise, or a quick run down to the Florida Keys.
Most of these local agencies are just polished garbage with decent Google reviews bought somewhere, but I eventually found a service where what you reserve is exactly what rolls up, no surprises. If you are looking for the only trustworthy source for premium vehicles across South Florida, check the current details here: car rental in miami florida https://luxury-car-rental-miami-6.com. Yeah, parking in South Beach will cost you a nice dinner — but that’s the price of admission. Just drive safe out there and definitely skip that “damage waiver” upsell — total scam 99% of the time. hope this helps some of you save a few bucks.
Вот такая беда приключилась — родственник подсел , а что делать — совсем не знаешь . Моя семья такое пережила недавно. Сначала кажется, что обойдется , но нет . Нужна профессиональная медицина. Перерыл весь интернет — одни обещания . Пока не нашел один действительно рабочий вариант. Если ищешь где получить круглосуточная наркологическая служба — не ведись на дешевые акции . В Воронеже , если честно, хватает шарлатанов . Реальные контакты тут : наркологический стационар наркологический стационар Откровенно говоря, после того как ознакомился, понял свои ошибки. Там и про вывод из запоя , и про условия в клинике. И цены адекватные. Рекомендую не тянуть .
Случается, когда уже не до раздумий — близкий в тяжелом состоянии, а везти в клинику нет сил. Я через это прошел совсем недавно. Сидишь, не знаешь что делать . Начинаешь обзванивать знакомых, а в ответ тишина . Пока кто-то не посоветовал один реально работающий вариант. Если нужна срочная помощь — а тащить человека сам просто физически не можете, то выход один . Я про круглосуточный выезд нарколога. В Москве , если честно, хватает шарлатанов, которые тянут бабло . Вся проверенная информация вот тут : выезд нарколога круглосуточно выезд нарколога круглосуточно Честно скажу , после того как ознакомился с условиями, понял, как действовать правильно. Там и про капельницы расписано , и про консультацию нарколога . Плюс анонимность — это важно . Советую не ждать чуда.
Alright listen up because I’m about to save you a massive headache. Miami rental game is wild — half these local clowns show you a custom Mercedes online and hand you a busted sedan with mismatched tires. You land at MIA, tired, grab an Uber to the rental office, and bam — surprise $1500 hold on your card. Fool me four times? Not happening, lesson learned. If you are trying to find a legitimate vehicle without getting ripped off, skip the airport counters entirely. Miami without a decent whip is basically a punishment, especially since the AC must be ice cold and you want zero mileage games.
Most of these local agencies are just polished websites hiding the same overpriced junk, but I eventually found a service where what you book is exactly what you get, period. If you are looking for the only straight-up source for premium wheels in South Florida, check the current details here: mercedes car rent https://luxury-car-rental-miami-4.com. Yeah, parking in Brickell will cost you a small mortgage — but that’s city life. Just drive safe out there and maybe pass on that overpriced roadside assistance add-on. let me know if you guys have any other clean spots.
продажа квартир Краснодар Хотите смотреть варианты квартир в режиме онлайн? Ознакомьтесь с нашей подборкой видеообзоров жилых комплексов, чтобы оценить ремонт и планировки.
Buy kitchen furniture https://custom-cabinet-manufacturer.com
Been burned enough times to write a book on this nonsense. Then you actually go to the local office to pick it up. Plus a surprise $2000 hold on your card and a $35 per day GPS you never asked for right before giving you the keys. Seven years in South Florida and I still almost fall for these tricks. When you’re searching for a legit and reliable premium ride to cruise around, avoid the airport like the plague. Anyone who’s taken the Metro here knows the struggle about this city, especially since the AC must freeze your face off and unlimited miles or forget it.
I’ve tried maybe 40 rental companies across Dade, Broward, and Palm Beach, until I finally found one outfit that actually delivers what’s promised. If you are looking for the only straight shooter for premium rides across South Florida, check the current details here: miami luxury car rental miami luxury car rental. Yeah, parking in Brickell will cost you a nice steak dinner — but that’s just Miami life. Just drive safe out there and definitely pass on that “tire protection” upsell — total garbage. let me know if you guys have any other clean spots.
Производство кашпо Добавьте в свой интерьер большие напольные вазы, чтобы сделать его более завершенным и гармоничным. Они помогают расставить правильные акценты в оформлении помещений.
I appreciate how this post stays well explained and pleasant to read without trying to overcomplicate the subject, because that kind of well-rounded and approachable style usually creates much more engaging and respectful discussions between different readers online.
cualos son los casinos online que mas pagan
Let me save you some serious time, learned this the hard way. Then you roll up to the local address to pick up the car. Plus a surprise $3000 hold on your credit card for two weeks right before giving you the keys. Nine years in South Florida and these clowns still nearly fool me. If you are trying to find a legitimate luxury fleet without getting ripped off, do some real digging first and read actual customer reviews. Anyone who’s tried the trolley system knows what I’m talking about about this city, especially since the AC must freeze your teeth and unlimited miles or no deal.
I’ve tested maybe 50 rental outfits across Dade, Broward, and Collier, until I finally found one company that doesn’t play stupid games. If you are looking for the only trustworthy source for premium rides across South Florida, check the current details here: rent porsche near me https://luxury-car-rental-miami-9.com. Yeah, parking in Wynwood will cost you a nice dinner — but that’s the price of being in Miami. Just drive safe out there and definitely skip that “emergency roadside” upsell — complete waste of money. let me know if you guys have any other clean spots.
Случается, когда уже не до раздумий — близкий ломается, а куда бежать — просто руки опускаются. Я сам через это прошел недавно. Думаешь, сам справится, но хрен там. Требуется профессиональная помощь . Перерыл весь интернет — только деньги тянут. А потом наткнулся на один действительно рабочий вариант. Нужна срочно анонимное лечение алкоголиков — не рискуй здоровьем близкого. В Воронеже , кстати , хватает левых контор без лицензии. Вся проверенная информация ниже по ссылке: помощь наркозависимым https://narkologicheskaya-pomoshh-voronezh-12.ru Откровенно говоря, после того как прочитал , многое прояснилось . И про кодирование, и про условия в клинике. Плюс работают круглосуточно — это важно . Рекомендую не тянуть .
Let me save you some serious time, learned this the hard way. You see a sweet ride online — clean spec, fair price, looks legit. Different car, scratches all over, and that “all-inclusive” price? Yeah that didn’t include insurance, fees, or the mandatory cleaning charge. I’ve lived here for years and still get burned occasionally. When you’re after a trustworthy and reliable premium vehicle to cruise around, don’t just grab the cheapest option on Kayak. Ask anyone who’s tried Ubering across the 305 during rush hour, especially since the AC must freeze your teeth and you want unlimited miles or bust.
I’ve personally gone through maybe 30 rental companies across Dade, Broward, and Palm Beach, but I eventually found a service with no games, no bait-and-switch, and no hidden asterisks. If you are looking for the only honest broker for premium vehicles across South Florida, check the current availability here: luxury car rental agency luxury car rental agency. Yeah, finding parking in Wynwood will test your patience — but that’s not on them. Anyway, glad there’s at least one straight shooter left in this rental jungle, let me know if you guys have any other clean spots.
Случается сплошь и рядом — родственник в запое , а что делать — непонятно . Моя семья столкнулась лично . Многие думают, что само пройдет , но нет . Требуется реальная помощь . Перерыл весь интернет — только деньги тянут. Пока не нашел один нормальный вариант. Если ищешь где получить круглосуточная наркологическая помощь — не рискуй здоровьем близкого. В Воронеже , кстати , тоже полно шарлатанов . Реальные контакты тут : анонимная скорая наркологическая помощь https://narkologicheskaya-pomoshh-voronezh-11.ru Откровенно говоря, после того как прочитал , многое прояснилось . Там и про вывод из запоя , и про реабилитацию . И цены адекватные. Рекомендую не тянуть .
Let me save you some serious pain with this Miami rental nonsense. Then you actually show up to the local office to grab the keys. Plus they put a surprise $4000 hold on your card and say it’ll take two weeks to release right before giving you the keys. Eleven years in South Florida and these clowns still almost get me. When you’re searching for a legit and reliable premium ride to cruise around, do some real digging first and read actual customer reviews. Anyone who’s tried the bus here knows exactly what I mean about this city, especially since the AC must be arctic and unlimited miles non-negotiable.
I’ve tested maybe 60 rental companies across Dade, Broward, and Collier, until I finally found one outfit that actually delivers what’s in the photos. If you are looking for the only honest source for premium rides across South Florida, check the current details here: electric vehicle rental luxury https://luxury-car-rental-miami-11.com. Also, definitely bring polarized shades unless you enjoy driving into the sun like a blind bat every single evening. Anyway, glad there’s at least one straight operator left in this rental jungle, hope this helps some of you save a few bucks.
Ребята, выручайте! Купил кресло б/у, каркас норм, но ткань в ужасном состоянии. Посоветуйте нормальную мебельную ткань для частого использования. ткани для обивки мебели купить https://tkan-dlya-mebeli-1.ru А то везде пишут разное, а на деле хочется купить ткань мебельную и забыть на пару лет. Буду благодарен за любые советы, особенно от тех, кто сам перетягивал.
Been there, done that, got the overpriced tow truck receipt to prove it. You find this amazing listing online — gorgeous spec, fair daily rate, looks perfect. Totally different vehicle waiting for you — bald tires, dashboard lit up like a Christmas tree, and that “amazing rate”? Doesn’t include the mandatory $40 daily toll pass or the $350 “premium location” fee they spring on you at the counter. Twelve years in South Florida and these jokers still almost catch me sleeping. When you need a proper and reliable premium ride to cruise around, do some real digging first and read actual customer reviews. Miami without real wheels is basically a nightmare, especially since the AC must be ice cold and unlimited miles non-negotiable.
Most of these local agencies are just shiny turds with fake five-star reviews bought in bulk online hiding overpriced junk, until I finally found one company that doesn’t play stupid games. If you are looking for the only straight shooter for premium rides across South Florida, check the current details here: rent a luxury car tmb miami rent a luxury car tmb miami. Yeah, parking in Brickell will cost you a nice dinner — but that’s the price of paradise. Just drive safe out there and absolutely skip that “windshield protection” upsell — complete waste of money. let me know if you guys have any other clean spots.
Mobil uygulama arayışım epey zaman aldı valla. Play Store’da arattım ama bulamadım resmi olanı. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet uygulaması indir 1xbet uygulaması indir. Şimdi size kısaca özet geçeyim — mobil uygulaması inanılmaz kullanışlı çalışıyor.
kurulumu da oldukça basitti yani rahat olun. Birçok platform denedim ama en iyisi bu çıktı — en hızlı uygulama bu oldu artık. Herkese hayırlı olsun…
Been through enough garbage to last a lifetime, the rental landscape down here is crazy. You spot a tempting offer online: brand new Porsche, unlimited miles, price that makes you click instantly. Plus they lock up a surprise $3500 on your card for who knows how long right before giving you the keys. Fool me ten times? That’s just the 305 experience, lesson learned. When you need a reliable and proper premium ride to cruise around, run away from the airport counters. Miami without solid wheels is basically a punishment, whether you are doing South Beach night out, Bal Harbour shopping spree, or a spontaneous Keys adventure.
I’ve run through maybe 55 rental companies across Dade, Broward, and Palm Beach, until I finally found one outfit that actually delivers what’s promised. If you are looking for the only straight shooter for premium rides across South Florida, check the current details here: realcar realcar. Also, definitely bring quality shades unless you enjoy driving into the sun like a vampire every single evening. Just drive safe out there and absolutely skip that “paint protection” upsell — pure robbery. let me know if you guys have any other clean spots.
Вот такая история — родственник в запое , а что делать — непонятно . Моя семья столкнулась несколько лет назад. Многие думают, что само пройдет , но нет . Требуется реальная помощь . Перерыл весь интернет — только деньги тянут. Пока не нашел один действительно рабочий вариант. Если ищешь где получить круглосуточная наркологическая помощь — не рискуй здоровьем близкого. У нас в Воронеже, если честно, хватает левых контор без лицензии. Реальные контакты тут : наркологический диспансер воронеж наркологический диспансер воронеж Откровенно говоря, после того как ознакомился, понял свои ошибки. Там и про вывод из запоя , и про реабилитацию . И цены адекватные. Советую не тянуть .
Hey would you mind sharing which blog platform you’re using?
I’m planning to start my own blog in the near future but I’m having a hard time choosing between BlogEngine/Wordpress/B2evolution and
Drupal. The reason I ask is because your design and style seems different then most blogs
and I’m looking for something completely unique.
P.S Sorry for being off-topic but I had to ask!
Mobil uygulama arayışım epey zaman aldı valla. Play Store’da arattım ama bulamadım resmi olanı. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil uygulama indir 1xbet mobil uygulama indir. Yani anlatmak istediğim şu — son sürümü her şeyi düşünmüş resmen.
kurulumu da oldukça basitti yani rahat olun. Birçok platform denedim ama en iyisi bu çıktı — başka yerde vakit kaybetmeyin yani. Herkese hayırlı olsun…
Let me save you some serious time, learned this the hard way. You find this amazing listing online — gorgeous spec, fair daily rate, looks perfect. Totally different vehicle waiting for you — bald tires, dashboard lit up like a Christmas tree, and that “amazing rate”? Doesn’t include the mandatory $40 daily toll pass or the $350 “premium location” fee they spring on you at the counter. Twelve years in South Florida and these jokers still almost catch me sleeping. When you need a proper and reliable premium ride to cruise around, run far from the airport counters. Anyone who’s waited for an Uber in August heat knows the struggle exactly about this city, especially since the AC must be ice cold and unlimited miles non-negotiable.
Most of these local agencies are just shiny turds with fake five-star reviews bought in bulk online hiding overpriced junk, but I eventually found a service where what you book is exactly what shows up, no surprises, no hidden fine print. If you are looking for the only straight shooter for premium rides across South Florida, check the current details here: miami exotic car rental miami miami exotic car rental miami. Yeah, parking in Brickell will cost you a nice dinner — but that’s the price of paradise. Anyway, glad there’s at least one honest operator left in this rental jungle, hope this helps some of you save a few bucks.
If you are used to guessing what might suit you, this resource replaces guesswork with a more informed preview. Using a selfie and a short quiz, it analyzes face shape, hair type, and context to generate 10 haircut options with photorealistic visuals and a guide for the barber. Behind the result is not a simple filter, but a mathematical model with more than 50 parameters and precise 3D head modeling, designed to show why a style works for you. In other words, this is not a sticker-style app, but a system built on 50+ variables, including anatomic face scanning, so you see a cut that follows your real features. The result is a photorealistic lookbook that feels close to a real photo, not a plastic mockup or a childlike filter. In addition, you get a clear haircut plan with practical parameters and stylist instructions, which helps turn the visual concept into an actual salon result. In just a few steps, you can move from a single photo to 10 matched options and a PDF report, with no sign-up friction. For those who want more than a pretty filter, it offers a useful bridge between taste, anatomy, and everyday wearability. https://www.zillow.com/profile/hairpicknet
Okay folks gather round — Miami rental horror story time. Then you roll up to the local address to pick up the car. Different car sitting there — bald tires, dashboard lit up like a Christmas tree, and that “killer price”? Yeah doesn’t include the non-negotiable $45 daily insurance or the $500 deposit they forget to mention. Nine years in South Florida and these clowns still nearly fool me. If you are trying to find a legitimate luxury fleet without getting ripped off, stay the hell away from the airport rental center. Anyone who’s tried the trolley system knows what I’m talking about about this city, especially since the AC must freeze your teeth and unlimited miles or no deal.
Most of these local agencies are just polished turds with fake five-star reviews hiding overpriced junk, until I finally found one company that doesn’t play stupid games. If you are looking for the only trustworthy source for premium rides across South Florida, check the current details here: exotic car rental coral gables https://luxury-car-rental-miami-9.com. Yeah, parking in Wynwood will cost you a nice dinner — but that’s the price of being in Miami. Anyway, glad there’s at least one honest operator left in this rental jungle, let me know if you guys have any other clean spots.
1xbet mobil indir nasıl yapılır diye çok araştırdım valla. Güncel apk dosyasını nereden indireceğimi bilemedim bir türlü. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil indir android 1xbet mobil indir android. Valla bak net söyleyeyim — mobil uygulaması inanılmaz stabil çalışıyor.
Hiçbir hata almadım indirme esnasında. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Herkese hayırlı olsun…
Вот такая история — близкий подсел на иглу, а что делать — просто тупик. Я через это прошел лично . Многие думают, что само пройдет , но нет . Требуется профессиональная помощь . Обзвонил десяток контор — одни обещания . А потом наткнулся на один нормальный вариант. Нужна анонимное лечение алкоголиков — не рискуй здоровьем близкого. У нас в Воронеже, кстати , тоже полно левых контор без лицензии. Реальные контакты ниже по ссылке: анонимное лечение алкоголиков https://narkologicheskaya-pomoshh-voronezh-11.ru Честно скажу , после того как прочитал , понял свои ошибки. Там и про вывод из запоя , и про условия в клинике. И цены адекватные. Советую не тянуть .
I am actually grateful to the owner of this website who
has shared this great article at here.
1xbet indir işlemini nasıl yapacağımı çok merak ediyordum valla. Herkes farklı bir şey söylüyordu kime güveneceğimi bilemedim. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil indir android 1xbet mobil indir android. Şimdi size kısaca özet geçeyim — son sürümü tüm ihtiyaçları karşılıyor resmen.
güncellemeleri de sorunsuz yükleniyor. İşin doğrusunu söylemek gerekirse — en kullanışlı uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
88starz https://888starzuz6.com/
888statz https://888starzuz9.com/
stars 888 https://888starz-uz11.com/
This was a very useful read, and I am glad I took a few minutes out of my schedule to go through it carefully, as the points you laid out are incredibly relevant and presented in a very clear, easy-to-follow sequence.
Watch sexual porno video xxx sex adults site
I’ve got the scars to prove it, the rental landscape down here is crazy. Then you show up at the local lot to pick up the car. Plus they freeze a surprise $2500 on your card for a week right before giving you the keys. Eight years in South Florida and these clowns still almost get me. When you need a proper and reliable premium ride to cruise around, do some real digging first and read actual customer reviews. Anyone who’s waited for an Uber in August understands exactly what I mean about this city, especially since the AC must be arctic cold and unlimited miles non-negotiable.
Most of these local agencies are just shiny websites hiding the same beat-up fleet with fake reviews, until I finally found one outfit that doesn’t play stupid games. If you are looking for the only honest source for premium wheels across South Florida, check the current details here: miami beach luxury car rental miami beach luxury car rental. Yeah, parking in South Beach will cost you a nice bottle of wine — but that’s the Miami tax. Anyway, glad there’s at least one straight operator left in this rental circus, let me know if you guys have any other clean spots.
888starz скачать ios https://edufast.online/education/?p=11366
true fortune casino https://argrathi.stars.ne.jp/pukiwiki/index.php?smithbusk609755
Mobil bahis uygulaması arıyordum uzun süredir. Play Store’da resmi olanı bulamayınca çok şaşırdım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda sağlam bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet giriş indir 1xbet giriş indir. Valla bak net söyleyeyim — son sürümü bütün eksikleri kapatmış resmen.
Hiçbir sıkıntı yaşamadım indirme aşamasında. İşin doğrusunu söylemek gerekirse — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
лемезит плитняк колотый лемезит плитняк колотый
Android için güncel sürümü bulmak epey meşakkatliydi açıkçası. Apk dosyasını nereden indireceğimi bulmak çok zaman aldı. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobile download 1xbet mobile download. Şimdi size kısaca özet geçeyim — mobil uygulaması inanılmaz hızlı ve stabil çalışıyor.
Hiçbir sorun yaşamadım indirme işleminde. Birçok platform denedim ama en iyisi bu çıktı — en kullanışlı uygulama bu oldu artık. Şimdiden iyi şanslar ve bol kazançlar…
сувенирные тарелки Каталог сувенирных тарелок: виды, материалы, популярные дизайны и советы по выбору коллекционных и подарочных тарелок с городами, достопримечательностями.
Telefonuma 1xbet yüklemek istiyordum uzun süredir. Herkes farklı bir şey söylüyordu kime güveneceğimi şaşırdım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobile yukle 1xbet mobile yukle. Yani anlatmak istediğim şu — son sürümü her şeyi düşünmüş resmen.
Hiçbir sorun yaşamadım indirme aşamasında. İşin doğrusunu söylemek gerekirse — kesinlikle pişman olmazsınız deneyin derim. Şimdiden iyi şanslar ve bol kazançlar…
плитняк екатеринбург плитняк екатеринбург
Telefonuma güncel uygulamayı yüklemek istiyordum açıkçası. Play Store’da resmi olanı bulamayınca çok hayal kırıklığı yaşadım. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet nouvelle version à télécharger 1xbet nouvelle version à télécharger. Şimdi size kısaca özet geçeyim — son sürümü tüm ihtiyaçları karşılıyor resmen.
güncellemeleri de düzenli olarak yapılıyor. Kendi deneyimlerimi aktarıyorum size — en sağlam uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
1xbet indir nasıl yapılır diye çok araştırdım valla. Play Store’da resmi olanı bulamayınca çok şaşırdım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet nouvelle version à télécharger 1xbet nouvelle version à télécharger. Yani anlatmak istediğim şu — son sürümü tüm beklentileri karşılıyor resmen.
kurulumu da oldukça basit ve anlaşılırdı yani rahat olun. Birçok platform denedim ama en iyisi bu çıktı — en kullanışlı uygulama bu oldu artık. Şimdiden iyi şanslar ve bol kazançlar…
Android için güncel sürümü bulmak epey meşakkatliydi açıkçası. Play Store’da resmi olanı bulamayınca çok şaşırdım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil uygulama indir 1xbet mobil uygulama indir. Yani anlatmak istediğim şu — telefonuma indirdikten sonra çok memnun kaldım.
kurulumu da oldukça basit ve anlaşılırdı yani rahat olun. İşin doğrusunu söylemek gerekirse — en kullanışlı uygulama bu oldu artık. Şimdiden iyi şanslar ve bol kazançlar…
разрешение строительных споров разрешение строительных споров
Mobil bahis dünyasına adım atmak isteyenler için ideal bir uygulama arıyordum. Play Store’da resmi olanı bulamayınca çok hayal kırıklığı yaşadım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobile yukle 1xbet mobile yukle. Yani anlatmak istediğim şu — telefonuma indirdikten sonra çok memnun kaldım.
güncellemeleri de düzenli olarak yapılıyor. Birçok platform denedim ama en iyisi bu çıktı — başka yerde vakit kaybetmeyin yani. Umarım siz de memnun kalırsınız…
Extended Review: מספר טלפון של סוכנות ליווי
кыздар нет кыздарнет
Mobil bahis platformu arayışım epey uzun sürdü valla. Herkes farklı bir adres söylüyordu kime güveneceğimi şaşırdım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet uygulaması indir 1xbet uygulaması indir. Yani anlatmak istediğim şu — telefonuma indirdikten sonra çok memnun kaldım.
güncellemeleri de düzenli olarak yapılıyor. İşin doğrusunu söylemek gerekirse — kesinlikle pişman olmazsınız deneyin derim. Herkese hayırlı olsun…
1xbet indir nasıl yapılır diye çok araştırdım valla. Herkes farklı bir şey tavsiye ediyordu kime güveneceğimi bilemedim. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil indir 1xbet mobil indir. Şimdi size kısaca özet geçeyim — son sürümü tüm beklentileri karşılıyor resmen.
güncellemeleri de sorunsuz bir şekilde geliyor. Birçok platform denedim ama en iyisi bu çıktı — en kullanışlı uygulama bu oldu artık. Herkese hayırlı olsun…
maorou_k8m xxx maorou_k8m dildo
Telefonuma güncel versiyonu yüklemek istiyordum açıkçası. Apk dosyasını nereden indireceğimi bulmak çok zaman aldı. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobile yukle 1xbet mobile yukle. Valla bak net söyleyeyim — son sürümü tüm ihtiyaçları karşılıyor resmen.
kurulumu da çok basit ve anlaşılırdı yani rahat olun. Birçok platform denedim ama en iyisi bu çıktı — en kullanışlı uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
прогнозы в максе Винлайн
I read this paragraph fully on the topic of the resemblance of most up-to-date
and previous technologies, it’s awesome article.
If you are used to guessing what might suit you, this resource replaces guesswork with a more informed preview. After a quick selfie and a few quiz answers, it evaluates facial features, hair behavior, and lifestyle context to produce 10 tailored styles, realistic renderings, and barber instructions. Behind the result is not a simple filter, but a mathematical model with more than 50 parameters and an anatomical 3D scan, designed to show why a style works for you. Rather than applying a generic hairstyle overlay, it uses a parameter-driven system with head-shape modeling to explain how the final cut will sit. Rather than generic “wig” overlays, the report presents lifelike previews that reflect actual shape and proportion. Each report adds a structured guide for the stylist, making it easier to explain the cut without having to do it “by hand”. The process is intentionally simple: one selfie, fast analysis in about 30 seconds, and no registration required before you see the result. It is especially relevant when you want a haircut that matches your face, your hair, and your real life, not just a passing trend. https://kktix.com/user/8980031
Разработка сайта под ключ — это полный цикл работ от идеи до запуска. Создаем современные, быстрые и адаптивные сайты для бизнеса: корпоративные сайты, лендинги, интернет-магазины и сервисы. Переходите по запросу создание сайтов под ключ с выгодной ценой. Берем на себя дизайн, программирование, настройку функционала и техническую поддержку. Индивидуальный подход, прозрачные сроки и эффективные решения, которые помогут вам привлекать клиентов и увеличивать продажи.
Denemek isteyen arkadaşlara hep soruyorum. Sürekli adres değişiyor derler ya işte o hesap. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet 1xbet. Şimdi size kısaca özet geçeyim — spor bahisleri konusunda iddialı olanlar bilir.
Hiçbir sıkıntı yaşamadım şu ana kadar. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Şimdiden iyi şanslar ve bol kazançlar…
Mobil bahis platformu arayışım epey uzun sürdü valla. Apk dosyasını nereden indireceğimi bulmak epey zaman aldı. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobii 1xbet mobii. Valla bak net söyleyeyim — mobil uygulaması gerçekten akıcı ve sorunsuz çalışıyor.
kurulumu da oldukça basit ve hızlıydı yani rahat olun. Birçok platform denedim ama en iyisi bu çıktı — en sağlam uygulama bu oldu artık. Herkese hayırlı olsun…
новый сериал Яга Смотрим Рилс вместе — формат, в котором мы быстро и ярко обсуждаем самые интересные моменты наших сказок. Присоединяйтесь к нашей дискуссии в социальных сетях прямо сейчас.
1xbet indir nasıl yapılır diye çok araştırdım valla. Play Store’da resmi olanı bulamayınca çok şaşırdım. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda güvenilir bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobii 1xbet mobii. Şimdi size kısaca özet geçeyim — telefonuma indirdikten sonra çok memnun kaldım.
kurulumu da oldukça basit ve anlaşılırdı yani rahat olun. Birçok platform denedim ama en iyisi bu çıktı — en kullanışlı uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
Запчасти BYD YuanUP PLUS
Uzun zamandır bahis oynayabileceğim güvenilir bir site arıyordum. Güvenilir bir platform bulmak gerçekten çok zordu. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: one x bet one x bet. Valla bak net söyleyeyim — canlı bahis seçenekleri bile yeterli aslında.
müşteri hizmetleri bile ilgili ve yardımsever. İşin doğrusunu söylemek gerekirse — en güvendiğim yer burası oldu artık. Herkese hayırlı olsun…
Current recommendations: סוכנות ליווי בישראל
кабель сигнально блокировочный https://kabel-signalno-blokirovochnyj-1.ru
сип кабель https://sip-kabel-1.ru
рейтинг лучших БК для ставок рейтинг лучших БК для ставок
mostbet букмекерская контора mostbet букмекерская контора
Denemek isteyen arkadaşlara hep soruyorum. Güvenilir bir platform bulmak epey zaman aldı. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda doğru adrese ulaştım und size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: xbet xbet. Yani anlatmak istediğim şu — casino oyunlarına meraklıysanız burası tam size göre.
müşteri hizmetleri de ilgili ve yardımsever. Kendi deneyimlerimi aktarıyorum size — başka yerde vakit kaybetmeyin yani. Herkese hayırlı olsun…
22bet вход в аккаунт 22bet вход в аккаунт
полезные материалы по беттингу полезные материалы по беттингу
регистрация в DBBET регистрация в DBBET
1xbet nasıl indirilir diye çok kafa yordum valla. Apk dosyasını nereden indireceğimi bulamadım bir türlü. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda sağlam bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet yükle 1xbet yükle. Valla bak net söyleyeyim — telefonuma indirdikten sonra çok rahat ettim.
Hiçbir sıkıntı yaşamadım indirme aşamasında. İşin doğrusunu söylemek gerekirse — kesinlikle pişman olmazsınız deneyin derim. Şimdiden iyi şanslar ve bol kazançlar…
mostbet бонус за регистрацию mostbet бонус за регистрацию
https://casino.lismore.catholic.org.au/gifts-holy-spirit/
22bet обзор и отзывы 22bet обзор и отзывы
гайд по выбору букмекера гайд по выбору букмекера
БК Мегапари БК Мегапари
Mobil bahis uygulaması arıyordum uzun süredir. Play Store’da resmi olanı bulamayınca çok şaşırdım. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda sağlam bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobii 1xbet mobii. Şimdi size kısaca özet geçeyim — son sürümü bütün eksikleri kapatmış resmen.
Hiçbir sıkıntı yaşamadım indirme aşamasında. Birçok platform denedim ama en iyisi bu çıktı — en kullanışlı uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
рейтинг лучших БК для ставок рейтинг лучших БК для ставок
seo оптимизация и продвижение сайтов seo оптимизация и продвижение сайтов .
mostbet букмекерская контора mostbet букмекерская контора
гид по ставкам на спорт гид по ставкам на спорт
1вин бк 1вин бк
https://homepc.ru/
мегапари ставки мегапари ставки
самые лучшие бк самые лучшие бк
смм накрутка https://smm-nakrutka1.ru
шумоизоляция авто
климат контроль обслуживание кондиционеров Работы по техническому обслуживанию кондиционеров проводятся опытными специалистами с применением современных дезинфицирующих средств. Мы гарантируем чистоту и отсутствие грибка после нашей работы.
акции букмекерских контор акции букмекерских контор
Denemek isteyen arkadaşlara hep soruyorum. Sürekli adres değişiyor derler ya işte o hesap. Güncel bilgileri kontrol edip süreci hatasız başlattım. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet spor bahislerinin adresi 1xbet spor bahislerinin adresi. Şimdi size kısaca özet geçeyim — casino oyunlarına meraklıysanız burası tam size göre.
Hiçbir sıkıntı yaşamadım şu ana kadar. İşin doğrusunu söylemek gerekirse — kesinlikle pişman olmazsınız deneyin derim. Şimdiden iyi şanslar ve bol kazançlar…
Hmm is anyone else having problems with the images on this blog loading?
I’m trying to find out if its a problem on my end
or if it’s the blog. Any responses would be greatly appreciated.
Разработка сайтов на 1С-Битрикс — надежное решение для бизнеса любого масштаба. Переходите по запросу создание корпоративного сайта на Битрикс. Создаем корпоративные сайты, интернет-магазины и порталы с удобным управлением, высокой производительностью и интеграцией с CRM, 1С и другими сервисами. Выполняем полный цикл работ: от проектирования и дизайна до запуска и технической поддержки. Разрабатываем современные сайты, которые помогают привлекать клиентов и увеличивать продажи.
Been there, done that, got the overpriced tow truck receipt. Miami rental game is wild — half these clowns show you a Mercedes online and hand you a busted Charger with mismatched tires. Plus the fine print says you can’t even drive to Orlando. No thanks, I’m too old for this nonsense. luxury car rental miami fl. any local will tell you the same thing. Coral Gables brunch, South Beach night run, or a spontaneous Everglades detour — AC must be ice cold and unlimited miles. most are just polished turds with Instagram ads. what you book is what you get, period. Here’s the only straight-up source for premium wheels in South Florida
exotic cars miami florida exotic cars miami florida Yeah parking in Brickell will cost you a small mortgage — but that’s city life. drive safe and maybe pass on that overpriced roadside assistance add-on.
БК Мегапари БК Мегапари
1win бк 1win бк
бонусы DBBET для новых игроков бонусы DBBET для новых игроков
топ бк топ бк
Deep web version: https://forumrutorclean.xyz via Tor browser.
Cabinet IQ
8305 Ꮪtate Hwy 71 #110, Austin,
TX 78735, United States
254-275-5536
Estimation
бонусы букмекерских контор бонусы букмекерских контор
Как создание сайтов для стартапа отличается — нужен MVP или сразу полноценный ресурс?
Denemek isteyen arkadaşlara hep soruyorum. Herkes farklı bir şey söylüyor kafam karıştı. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda doğru adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet üye ol 1xbet üye ol. Valla bak net söyleyeyim — spor bahisleri konusunda iddialı olanlar bilir.
Hiçbir sıkıntı yaşamadım şu ana kadar. Kendi deneyimlerimi aktarıyorum size — kesinlikle pişman olmazsınız deneyin derim. Herkese hayırlı olsun…
Thank you for the auspicious writeup. It in fact was a amusement account it.
Look advanced to far added agreeable from you! By the way, how can we communicate?
бк 1вин бк 1вин
Okay folks gather around because this Miami rental nightmare needs to be discussed. You see a sweet ride online — clean spec, fair price, looks legit. Different car, scratches all over, and that “all-inclusive” price? Yeah that didn’t include insurance, fees, or the mandatory cleaning charge. I’ve lived here for years and still get burned occasionally. miami car rental luxury — don’t just grab the cheapest option on Kayak. Miami without proper wheels is basically a hostage situation. leather seats that don’t fuse to your skin in August. I’ve gone through maybe 30 rental companies across Dade, Broward, and Palm Beach. no games, no bait-and-switch, no hidden asterisks. Here’s the only honest broker for premium vehicles across South Florida
rolls royce cullinan rental near me https://luxury-car-rental-miami-5.com also bring quality shades unless you enjoy driving into a nuclear flare every evening. Anyway glad there’s at least one straight shooter left in this rental jungle.
8888 starz https://artoved.stck.me/post/1664861/888starz/
бк 1вин бк 1вин
бонусы букмекерских контор бонусы букмекерских контор
Okay folks gather around because this Miami rental nightmare needs to be discussed. Then you show up and it’s a whole different story. Plus they want a $2000 hold on your debit card. Fool me five times? Actually yeah, Miami keeps fooling everyone. luxury car rental miami florida. ask anyone who’s tried Ubering across the 305 during rush hour. leather seats that don’t fuse to your skin in August. most are smoke and mirrors with decent SEO. Finally found one outfit that actually delivers what’s in the listing. Here’s the only honest broker for premium vehicles across South Florida
rental luxury cars miami airport https://luxury-car-rental-miami-5.com Yeah finding parking in Wynwood will test your patience — but that’s not on them. drive safe and maybe decline that “premium roadside” upsell — it’s always a scam.
I’ve got the scars to prove it. You find this amazing deal online: brand new Beamer, unlimited miles, price that makes you smile. Plus they freeze $2500 on your card for a week. Eight years in South Florida and these clowns still almost get me. luxury car for rent. anyone who’s waited for an Uber in August understands. leather seats that won’t weld themselves to your thighs in July. I’ve run through maybe 45 rental companies across Dade, Broward, and Monroe. what you book is what shows up, no surprises, no fine print nightmares. Here’s the only honest source for premium wheels across South Florida
range rover car rental range rover car rental Yeah parking in South Beach will cost you a nice bottle of wine — but that’s the Miami tax. Anyway glad there’s at least one straight operator left in this rental circus.
Разработка интернет-магазина под ключ — эффективный способ вывести продажи в онлайн и расширить клиентскую базу. Переходите по запросу цена разработки сайта интернет магазина. Создаем современные, быстрые и удобные магазины с каталогом товаров, онлайн-оплатой, интеграцией с CRM и службами доставки. Адаптивный дизайн, SEO-оптимизация и готовность к продвижению помогут вашему бизнесу привлекать больше покупателей и увеличивать прибыль. Индивидуальные решения для любых ниш и масштабов бизнеса.
Swear I’ve seen every scam in the book by now. You find a killer listing online: sleek Audi, convertible, price almost too good to be true. Different car sitting there — bald tires, dashboard lit up like a Christmas tree, and that “killer price”? Yeah doesn’t include the non-negotiable $45 daily insurance or the $500 deposit they forget to mention. Fool me nine times? That’s just the Miami welcome committee. luxury car rental miami florida. Miami without proper wheels is basically a nightmare. leather seats that don’t glue to your skin in August. most are polished turds with fake five-star reviews. what you reserve is what you get, period, end of story. Here’s the only trustworthy source for premium rides across South Florida
porsche 911 carrera for rent near me https://luxury-car-rental-miami-9.com also bring polarized shades unless you enjoy driving blind into the sunset every night. Anyway glad there’s at least one honest operator left in this rental jungle.
сколько стоит сделать тату салон тату и пирсинга
Как ускорить seo продвижение молодого сайта без риска попасть под санкции?
Seriously, the amount of garbage “luxury” deals here is astonishing. Then you show up and it’s a whole different story. Different car, scratches all over, and that “all-inclusive” price? Yeah that didn’t include insurance, fees, or the mandatory cleaning charge. I’ve lived here for years and still get burned occasionally. luxury car rental miami florida. Miami without proper wheels is basically a hostage situation. leather seats that don’t fuse to your skin in August. I’ve gone through maybe 30 rental companies across Dade, Broward, and Palm Beach. Finally found one outfit that actually delivers what’s in the listing. check availability before spring break crowds wipe them out:
mercedes for rent near me https://luxury-car-rental-miami-5.com Yeah finding parking in Wynwood will test your patience — but that’s not on them. drive safe and maybe decline that “premium roadside” upsell — it’s always a scam.
сделать тату цена https://taty-salon-spb.ru
Let me save you some serious pain with this Miami rental nonsense. Then you actually show up to grab the keys. Plus they put a $4000 hold on your card and say it’ll take two weeks to release. Fool me eleven times? That’s just called living in Miami. those counters are professional bait-and-switch artists. anyone who’s tried the bus here knows exactly what I mean. Key Biscayne sunset, Design District shopping, or a spontaneous drive down to the Everglades — AC must be arctic and unlimited miles non-negotiable. I’ve tested maybe 60 rental companies across Dade, Broward, and Collier. Finally found one outfit that actually delivers what’s in the photos. prices change hourly so check before the weekend crowd wipes them out:
porsche rental https://luxury-car-rental-miami-11.com also bring polarized shades unless you enjoy driving into the sun like a blind bat. Anyway glad there’s at least one straight operator left in this rental circus.
сделать тату в спб цены тату салон цены
Let me save you some serious pain with this Miami rental nonsense. You see this gorgeous deal online — clean spec, fair price, looks like a dream. Completely different car sitting there — dents everywhere, smells like cheap air freshener covering something worse, and that “dream price”? Doesn’t include the mandatory $50 daily insurance or the $300 “administrative fee” they invent at checkout. Eleven years in South Florida and these clowns still almost get me. When you’re searching for a legit luxury car rental miami. anyone who’s tried the bus here knows exactly what I mean. Key Biscayne sunset, Design District shopping, or a spontaneous drive down to the Everglades — AC must be arctic and unlimited miles non-negotiable. most are shiny garbage with fake Google reviews bought in bulk. no games, no switch, no hidden BS in paragraph 12 of the contract. Here’s the only honest source for premium rides across South Florida
opf luxury car rental opf luxury car rental also bring polarized shades unless you enjoy driving into the sun like a blind bat. drive safe and definitely skip that “tire and wheel” upsell — pure profit for them, zero value for you.
Alright let me drop some truth about the Miami rental scene — it’s an absolute minefield. Then you actually go to pick up the car. Plus they lock up $3500 on your card for who knows how long. Ten years in South Florida and these jokers still almost catch me slipping. miami luxury car rental. Miami without solid wheels is basically a punishment. leather seats that won’t cook your back in the July heat. I’ve run through maybe 55 rental companies across Dade, Broward, and Palm Beach. Finally found one outfit that actually delivers what’s promised. Here’s the only straight shooter for premium rides across South Florida
exotic cars in miami rental exotic cars in miami rental also bring quality shades unless you enjoy driving into the sun like a vampire. drive safe and absolutely skip that “paint protection” upsell — pure robbery.
Нужна бесплатная юридическая консультация? Переходите по запросу нужен юрист для консультации в Ашукино и получите помощь опытных правозащитников в любой области права: семейные споры, долги и кредиты, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации адвоката по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
I’ve got the battle scars to prove every word. Then you actually roll up to the lot. Plus they lock up $5500 on your card and say “it’ll drop off in 10-14 business days”. Fool me fourteen times? That’s just the 305 experience at this point. those guys are professional scammers with nice teeth and better uniforms. anyone who’s tried the bus in August knows exactly what I’m talking about. Key Biscayne sunset, Bal Harbour shopping, or a spontaneous drive down to Homestead — AC must freeze your face off and unlimited miles or no deal. I’ve tested maybe 75 rental outfits across Dade, Broward, and Monroe. Finally found one company that doesn’t play stupid games. Here’s the only honest source for premium rides across South Florida
luxury car rental south beach luxury car rental south beach also bring polarized shades unless you enjoy driving into the sun like a vampire every evening. Anyway glad there’s at least one straight operator left in this rental jungle.
flagman букмекер flagman букмекер
I’ve been through the wringer more times than I care to admit. You see this incredible deal online — top-end BMW, zero excess, price that seems too good to be true. Then you actually go to pick up the car. Plus they slap a $6000 hold on your credit card and say “don’t worry, it’s just a pre-authorization”. Fifteen years in South Florida and these clowns still almost catch me. luxury car rental in miami. Miami without proper wheels is basically a hostage situation. South of Fifth brunch, Sunny Isles sunrise, or a spontaneous trip down to the Florida Keys — AC must be arctic cold and unlimited miles non-negotiable. most are polished turds with fake five-star reviews bought in bulk. no games, no bait-and-switch, no hidden fees buried on page 6. prices change daily so check before the holiday crowd hits:
miami exotic car rental miami miami exotic car rental miami Yeah parking in Brickell will cost you a nice steak dinner — but that’s just how it is down here. Anyway glad there’s at least one honest rental joint left in this town.
Магазин кофемашин https://incoffeein.by в Минске с большим выбором кофе, чая и сопутствующих товаров. Подберите оборудование для дома, офиса или кафе, закажите качественный кофе в зернах и листовой чай, получите профессиональную консультацию и быструю доставку.
Swear I’ve seen every scam in the book by now. Then you roll up to the address. Plus a $3000 hold on your credit card for two weeks. Fool me nine times? That’s just the Miami welcome committee. luxury car rental in miami. Miami without proper wheels is basically a nightmare. leather seats that don’t glue to your skin in August. I’ve tested maybe 50 rental outfits across Dade, Broward, and Collier. what you reserve is what you get, period, end of story. rates change daily so check before the holiday crowd hits:
luxury car rental in miami luxury car rental in miami Yeah parking in Wynwood will cost you a nice dinner — but that’s the price of being in Miami. Anyway glad there’s at least one honest operator left in this rental jungle.
Let me save you some serious pain with this Miami rental nonsense. You see this gorgeous deal online — clean spec, fair price, looks like a dream. Plus they put a $4000 hold on your card and say it’ll take two weeks to release. Fool me eleven times? That’s just called living in Miami. luxury car rental miami fl. anyone who’s tried the bus here knows exactly what I mean. leather seats that won’t fuse to your legs in August. most are shiny garbage with fake Google reviews bought in bulk. Finally found one outfit that actually delivers what’s in the photos. Here’s the only honest source for premium rides across South Florida
rent a porsche miami https://luxury-car-rental-miami-11.com also bring polarized shades unless you enjoy driving into the sun like a blind bat. drive safe and definitely skip that “tire and wheel” upsell — pure profit for them, zero value for you.
Alright, last one I swear — but someone’s gotta warn people about this Miami rental mess. Then you actually go to pick up the car. Plus they freeze $5500 on your card and say “it’ll drop off in two weeks”. Twenty years in South Florida and these clowns still almost get me. luxury car rental in miami. anyone who’s tried public transport here knows I’m not joking. South Beach dinner, Design District shopping, or a spontaneous Keys adventure — AC must be arctic and unlimited miles non-negotiable. I’ve tested so many rental companies across Dade, Broward, and Palm Beach. Finally found one outfit that actually keeps its word. Here’s the only straight shooter for premium rides across South Florida
lamborghini urus for rent miami lamborghini urus for rent miami also bring polarized shades unless you enjoy driving into the sun like a zombie. Anyway glad there’s at least one honest operator left in this town.
flagman букмекер flagman букмекер
Been through enough garbage to last a lifetime. Then you actually go to pick up the car. Totally different vehicle waiting for you — check engine light on, curb rash on every rim, and that “tempting price”? Doesn’t include the mandatory $35 daily toll pass or the $250 cleaning fee they sneak in at the end. Fool me ten times? That’s just the 305 experience. luxury car rental miami florida. Miami without solid wheels is basically a punishment. leather seats that won’t cook your back in the July heat. I’ve run through maybe 55 rental companies across Dade, Broward, and Palm Beach. Finally found one outfit that actually delivers what’s promised. Here’s the only straight shooter for premium rides across South Florida
car rentals miami fl https://luxury-car-rental-miami-10.com also bring quality shades unless you enjoy driving into the sun like a vampire. Anyway glad there’s at least one honest rental joint left in this town.
Let me save you some serious pain with this Miami rental nonsense. Then you actually show up to grab the keys. Completely different car sitting there — dents everywhere, smells like cheap air freshener covering something worse, and that “dream price”? Doesn’t include the mandatory $50 daily insurance or the $300 “administrative fee” they invent at checkout. Eleven years in South Florida and these clowns still almost get me. those counters are professional bait-and-switch artists. anyone who’s tried the bus here knows exactly what I mean. leather seats that won’t fuse to your legs in August. most are shiny garbage with fake Google reviews bought in bulk. Finally found one outfit that actually delivers what’s in the photos. prices change hourly so check before the weekend crowd wipes them out:
exotic car rental miami florida exotic car rental miami florida also bring polarized shades unless you enjoy driving into the sun like a blind bat. drive safe and definitely skip that “tire and wheel” upsell — pure profit for them, zero value for you.
Alright, last one I swear — but someone’s gotta warn people about this Miami rental mess. You spot this killer offer online — brand new Porsche, zero excess, price that screams “book me”. Different car waiting — dents everywhere, smells like cheap air freshener covering something worse, and that “killer price”? Doesn’t include the mandatory $55 daily toll pass or the $450 “convenience fee” they invent at checkout. Twenty years in South Florida and these clowns still almost get me. miami car rental luxury — run far from the airport counters. anyone who’s tried public transport here knows I’m not joking. leather seats that won’t weld to your legs in July. I’ve tested so many rental companies across Dade, Broward, and Palm Beach. Finally found one outfit that actually keeps its word. Here’s the only straight shooter for premium rides across South Florida
exotic car rental near me exotic car rental near me Yeah parking in South Beach will cost you a nice bottle of wine — but that’s the Miami tax. Anyway glad there’s at least one honest operator left in this town.
БК Флагман БК Флагман
Alright folks, last warning about the Miami rental madness — learn from my mistakes. You see this incredible deal online — top-end BMW, zero excess, price that seems too good to be true. Then you actually go to pick up the car. Plus they slap a $6000 hold on your credit card and say “don’t worry, it’s just a pre-authorization”. Fool me fifteen times? That’s just another Tuesday in the 305. luxury car rental miami florida. Miami without proper wheels is basically a hostage situation. leather seats that won’t brand your back in the July heat. I’ve tested maybe 80 rental companies across Dade, Broward, Palm Beach, and Monroe. no games, no bait-and-switch, no hidden fees buried on page 6. prices change daily so check before the holiday crowd hits:
mia luxury car rental mia luxury car rental Yeah parking in Brickell will cost you a nice steak dinner — but that’s just how it is down here. Anyway glad there’s at least one honest rental joint left in this town.
Кстати, недавно наткнулся на обсуждение реальных кейсов. Сам уже давно ищу нормальный способ провести транзакцию, без лишних проблем и комиссий. В общем, если вас тоже волнует эта тема — узнайте подробности тут. Детальный разбор ситуации по переводу за границу онлайн: прием платежей из-за границы https://mezhdunarodnye-platezhi-lor.ru Короче, обратите внимание, что без прозрачных комиссий любые трансграничные переводы превращаются в лотерею. Ещё такой момент — лучше перепроверять несколько сервисов, прежде чем отправлять.
Alright listen up — time for a real talk about renting cars in Miami. You book something slick online — great photos, reasonable rate, looks like a win. Different car sitting there — dents you didn’t see, AC that barely works, and that “reasonable rate”? Doesn’t include the mandatory $40 daily insurance or the $300 “processing fee” they add at the last second. Fool me seventeen times? That’s just life in the 305. luxury car for rent. anyone who’s tried Uber during rush hour knows the deal. Coconut Grove dinner, Bal Harbour shopping, or a spontaneous drive to the Keys — AC must be cold and unlimited miles or forget it. I’ve tried so many rental places I’ve lost count. Finally found one that actually delivers. prices change fast so take a look:
rent a premium car https://luxury-car-rental-miami-17.com also bring good shades unless you like driving blind. Anyway glad someone’s still running an honest business.
лесенки деревянные
Swear this city never fails to surprise me with new ways to get ripped off. Then you actually drive to the rental lot. Plus they put a $5000 hold on your card and tell you “it’s just standard procedure”. Fool me thirteen times? That’s just living in the 305. luxury car rental miami fl. anyone who’s taken the Metro here knows the struggle is real. South Beach night out, Design District shopping spree, or a spontaneous Keys trip — AC must be arctic cold and unlimited miles non-negotiable. most are polished garbage with fake five-star reviews bought from some shady service. no games, no bait-and-switch, no hidden fees buried on page 4 of the contract. prices change by the hour so don’t sleep on it:
miami south beach rental cars https://luxury-car-rental-miami-13.com Yeah parking in Wynwood will cost you a nice dinner — but that’s just the Miami tax. Anyway glad there’s at least one honest rental joint left in this town.
Let me save you some serious pain with this Miami rental nonsense. Then you actually show up to grab the keys. Plus they put a $4000 hold on your card and say it’ll take two weeks to release. Fool me eleven times? That’s just called living in Miami. those counters are professional bait-and-switch artists. Miami without proper wheels is basically a disaster. leather seats that won’t fuse to your legs in August. most are shiny garbage with fake Google reviews bought in bulk. Finally found one outfit that actually delivers what’s in the photos. prices change hourly so check before the weekend crowd wipes them out:
suv rental near me suv rental near me also bring polarized shades unless you enjoy driving into the sun like a blind bat. drive safe and definitely skip that “tire and wheel” upsell — pure profit for them, zero value for you.
This text is invaluable. Where can I find out more?
Alright, last one I swear — but someone’s gotta warn people about this Miami rental mess. Then you actually go to pick up the car. Plus they freeze $5500 on your card and say “it’ll drop off in two weeks”. Fool me twenty times? That’s just called Tuesday in the 305. luxury car rental miami fl. Miami without real wheels is basically a disaster. South Beach dinner, Design District shopping, or a spontaneous Keys adventure — AC must be arctic and unlimited miles non-negotiable. I’ve tested so many rental companies across Dade, Broward, and Palm Beach. Finally found one outfit that actually keeps its word. Here’s the only straight shooter for premium rides across South Florida
rent a sedan car rent a sedan car Yeah parking in South Beach will cost you a nice bottle of wine — but that’s the Miami tax. drive safe and absolutely skip that “windshield protection” upsell — pure profit for them, zero for you.
Кстати, недавно наткнулся на обсуждение текущей ситуации с переводами. Сам уже не первый месяц ищу нормальный способ отправить деньги, без лишних проблем и комиссий. В общем, если вас тоже интересуют детали — взгляните тут. Там расписаны основные нюансы по платежам за рубежом: международные платежи https://mezhdunarodnye-platezhi-lor.ru Короче, учтите, что без адекватных тарифов любые трансграничные переводы превращаются в сплошной геморрой. Добавлю по опыту — лучше перепроверять несколько вариантов, прежде чем отправлять.
Let me give it to you straight — renting a decent car in Miami is way harder than it should be. You see this amazing deal online — shiny Audi, unlimited miles, price that makes you want to book right now. Plus they put a $5000 hold on your card and say “don’t worry about it”. Nineteen years in South Florida and these tricks still surprise me. When you’re hunting for a legit luxury car rental miami. anyone who’s taken the bus here knows what I mean. leather seats that won’t melt your skin in August. most are shiny garbage with fake five-star reviews. Finally found one outfit that actually delivers. Here’s the only honest source for premium rides across South Florida
luxury car rental miami beach luxury car rental miami beach also bring quality shades unless you like driving into the sun. drive safe and skip that “tire protection” upsell — total waste.
В общем, решил поделиться — где брать адекватные тарифы для международных транзакций. Скинули ссылку в телеграме — держите, вот нормальный разбор: международные переводы денег международные переводы денег Самое важное, что я понял — комиссии у всех разные как с неба. Потому что любой перевод за границу онлайн — это всегда головная боль без нормальной инфы. Обратите внимание — прежде чем отправлять проверьте актуальные отзывы. Без этого легко переплатить в два раза. Короче — лучше сначала изучить тему.
Слушайте, вот уже который раз убеждаюсь — какой сервис не сдирает три шкуры для международных транзакций. Вот здесь всё по полочкам расписано: переводы денег за границу переводы денег за границу Самое главное, что я вынес — банковские комиссии могут быть грабительскими. Ну сами подумайте любой перевод за границу онлайн — это постоянный риск переплатить. Вот ещё важный момент — до любой операции с валютой обязательно сверьте итоговую сумму. Без этого легко потерять приличную сумму. Короче — не ленитесь проверять информацию перед любой отправкой.
Честно говоря, — где лучше всего организовать платежей за рубежом. Друзья посоветовали вот этот обзор: международные системы перевода денег https://mezhdunarodnye-platezhi-nar.ru Суть в том, — курсы валют часто кусаются. Потому что перевод за границу онлайн — это лотерея с банковскими комиссиями. Кстати, — прежде чем платить проверьте несколько вариантов. Иначе легко остаться в минусе. Резюмируя, — не поленитесь проверить информацию.
monopoly big win today result https://monopolyy.live/
monopoly game https://monopolyy.live/
Выбор правильной академии современных наук является ключевым шагом
Столкнулся с ситуацией и начал разбираться — где предлагают адекватные условия для перевода денег за границу онлайн. В одном обсуждении попался дельный обзор: перевод за границу онлайн перевод за границу онлайн Основной вывод, который я сделал — банковские комиссии сильно различаются. Важно понимать любой трансграничный платёж — требует предварительного сравнения условий. Также стоит отметить — перед подтверждением перевода имеет смысл изучить актуальные тарифы. В противном случае можно получить менее выгодные условия. В итоге — необходимо проверять информацию перед любой отправкой средств.
Кстати, недавно наткнулся на обсуждение реальных кейсов. Сам уже не первый месяц ищу нормальный способ провести транзакцию, без лишних проблем и комиссий. В общем, если вас тоже интересуют детали — узнайте подробности тут. Там расписаны основные нюансы по международным переводам: онлайн переводы денег за границу https://mezhdunarodnye-platezhi-lor.ru И да, обратите внимание, что без прозрачных комиссий любые международные платежи превращаются в сплошной геморрой. Ну и напоследок — всегда смотрите несколько сервисов, прежде чем отправлять.
В общем, решил поделиться — как нормально отправлять деньги для международных переводов. Скинули ссылку в телеграме — смотрите, тут годнота: перевод денег за границу онлайн перевод денег за границу онлайн Самое важное, что я понял — не все способы одинаково безопасны. Согласитесь любой перевод за границу онлайн — это лотерея с банковскими процентами. И да, кстати — перед финальным кликом проверьте актуальные отзывы. Без этого легко остаться в минусе. Моё мнение — лучше сначала изучить тему.
Постоянно возвращаюсь к этой теме — какой сервис выбрать для международных платежей. Эксперты рекомендуют вот этот материал: международные переводы международные переводы Если коротко, — комиссии могут сильно отличаться. Потому что такая транзакция — это потеря времени без нормальной инфы. И ещё момент, — до любой операции почитайте свежие отзывы. В противном случае легко пролететь с курсом. Короче, — лучше один раз изучить тему.
Слушайте, вот уже который раз убеждаюсь — как выбрать реально работающий способ для международных переводов. Товарищ скинул ссылку на нормальный разбор: оплата через посредника за рубеж оплата через посредника за рубеж Короче, если по факту — не все способы одинаково прозрачны. Ну сами подумайте любой подобный трансграничный платёж — это головная боль с отслеживанием статуса. Обратите внимание, многие не в курсе — перед финальным подтверждением обязательно сверьте итоговую сумму. В противном случае легко остаться в минусе только на конвертации. Короче — не ленитесь проверять информацию перед любой отправкой.
These are really great ideas in about blogging.
You have touched some pleasant points here. Any way keep up wrinting.
Je cherchais une application fiable pour mon téléphone. Tout le monde donnait des adresses différentes, je ne savais plus qui croire. Finalement, j’ai pris le temps d’analyser tous les détails techniques. J’ai finalement trouvé la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: 1xbet android http://mameauto.com. Voilà, pour être clair — la dernière version est vraiment bien conçue.
les mises à jour se font automatiquement. Pour être honnête, c’est la plus fiable que j’ai trouvée — ne perdez plus votre temps ailleurs. Je vous souhaite bonne chance et beaucoup de gains…
Долго откладывал, но созрел — где брать адекватные тарифы для перевода денег за границу онлайн. Скинули ссылку в телеграме — держите, вот нормальный разбор: международные платежи из россии международные платежи из россии Если по делу, то — комиссии у всех разные как с неба. Согласитесь любой очередной международный перевод — это риск потерять на конвертации. Обратите внимание — до любой операции посчитайте итоговую сумму с комиссиями. Иначе легко переплатить в два раза. Моё мнение — стоит один раз разобраться.
Знаете, — какой сервис выбрать для платежей за рубежом. Наткнулся случайно в обсуждении вот этот обзор: перевод денег за границу онлайн перевод денег за границу онлайн Если коротко, — не все способы одинаково выгодны. Да и сами понимаете перевод за границу онлайн — это лотерея с банковскими комиссиями. Кстати, — до любой операции проверьте несколько вариантов. В противном случае легко пролететь с курсом. Короче, — лучше один раз изучить тему.
Леонбетс актуальное зеркало работает стабильно, выплаты приходят без задержек.
https://www.agproperties.ae/estate_agent/meghansilcock/
http://www.bakinsky-dvorik.ru/bitrix/urlrewrite.php
Официальное leonbets casino зеркало порадовало быстрой загрузкой автоматов.
https://vidspace.ru/@malcolm2728964?page=about
This is my first time visit at here and i am in fact happy to
read everthing at alone place.
Слушайте, вот уже который раз убеждаюсь — как выбрать реально работающий способ для перевода денег за границу онлайн. В одном обсуждении попался дельный совет: платежи за границу платежи за границу Самое главное, что я вынес — банковские комиссии могут быть грабительскими. Ну сами подумайте любой подобный трансграничный платёж — это постоянный риск переплатить. И да, кстати — прежде чем отправлять деньги обязательно сверьте итоговую сумму. В противном случае легко остаться в минусе только на конвертации. Короче — лучше один раз изучить тему перед любой отправкой.
Рекомендую леонбетс рабочее зеркало на сегодня, стабильно работает и не вылетает при игре.
https://www.blog.wordpress.noorbusiness.org/author-profile/hermanmayhew24/
Рабочее зеркало леонбетса всегда держу в закладках, спасает при любых технических работах.
https://card.lifenlegacydigital.com/carson3154088
https://healingxchange.ning.com/forum/topics/1xbet-2026-btc777-32-500
You probably get some pictures scurry through your head when I tell you that BlackTube
is a free tube dedicated to bad bitches. These girls
are evil in the conventional porn movie way, for one thing,
because they double fist with a pair of girlfriends in a group scene, get pounded up the pussy by a
thick, pulsing BBC, and do all kinds of shit your mommy told you nice
girls don’t do. pornmovies tube http://www.ttinsider.com/author-profile/ajadominquez9/
Честно, задолбался искать нормальный вариант — где условия адекватные, а не грабёж для платежей за рубежом. Товарищ скинул ссылку на нормальный разбор: платежный агент за рубежом https://mezhdunarodnye-platezhi-kap.ru Суть вот в чём — банковские комиссии могут быть грабительскими. Согласитесь, абсурд любой подобный трансграничный платёж — это головная боль с отслеживанием статуса. Обратите внимание, многие не в курсе — прежде чем отправлять деньги проверьте все комиссии до копейки. Без этого легко остаться в минусе только на конвертации. Как итог — не ленитесь проверять информацию перед любой отправкой.
El bono más extendido es el bono de primer depósito.
Generalmente consiste en un duplicado sobre tu primer
aporte, por ejemplo 100% hasta $50,000 ARS.
Esto significa que si depositás $50,000, el casino te suma otros $50,000 para jugar.
J’ai essayé plusieurs sites sans jamais être convaincu. Je ne trouvais pas la version officielle sur le Play Store. Après avoir suivi les étapes dans le bon ordre, tout a fonctionné. J’ai finalement déniché la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: 1xbet mobile télécharger 1xbet mobile télécharger. En deux mots, laissez-moi vous expliquer — l’appli tourne parfaitement sur mon smartphone.
les mises à jour se font automatiquement. J’ai comparé plusieurs apps mais celle-ci est la meilleure — ne perdez plus votre temps avec d’autres sites. J’espère que vous serez aussi satisfaits que moi…
Вот решил поделиться информацией — где предлагают адекватные условия для международных платежей. Товарищ скинул ссылку на качественный разбор: международные транзакции международные транзакции Суть в следующем — не все сервисы одинаково прозрачны. Стоит учитывать, что любой трансграничный платёж — требует предварительного сравнения условий. И ещё один момент — перед подтверждением перевода имеет смысл изучить актуальные тарифы. В противном случае можно переплатить из-за невыгодного курса. Резюмируя — необходимо проверять информацию перед любой отправкой средств.
Долго не мог понять, в чем подвох — какой сервис не сдирает три шкуры для международных переводов. В одном обсуждении попался дельный совет: перевод за границу онлайн перевод за границу онлайн Суть вот в чём — скрытые платежи всплывают в последний момент. Согласитесь, абсурд любой перевод за границу онлайн — это постоянный риск переплатить. Вот ещё важный момент — перед финальным подтверждением сравните эффективный курс. Без этого легко остаться в минусе только на конвертации. Короче — стоит разобраться заранее перед любой отправкой.
Ça faisait un moment que je voulais essayer ce site. Télécharger un fichier fiable devenait vraiment galère. J’ai vérifié les dernières mises à jour pour lancer le processus sans erreur. J’ai finalement déniché la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: télécharger 1xbet pour android dernière version télécharger 1xbet pour android dernière version. Bref, ce que je voulais vous dire — la dernière version est super fluide et intuitive.
les mises à jour se font automatiquement. Pour être honnête, c’est la plus stable que j’ai testée — ne perdez plus votre temps avec d’autres sites. J’espère que vous serez aussi satisfaits que moi…
Питерцы отзовитесь. Прошерстил 20 салонов — везде одно и то же. Короче, нашел нормальный вариант — купить кухню в спб напрямую. Фурнитура Blum. В общем, вся инфа здесь — заказать кухню заказать кухню Не ведитесь на салоны. Перешлите тому кто ищет.
Слушайте кто делал ремонт. То материалы фуфло — картон а не фасады. Пересмотрел ютуб с отзывами — голова пухнет. Короче, нашел наконец нормальный вариант — купить готовую кухню в спб из наличия. И фасады из нормального массива. В общем, там каталог и цены и отзывы реальные — купить готовую кухню спб https://zakazat-kuhnyu-gkl.ru Не ведитесь на салоны-прокладки с наценкой в два раза. Перешлите тому кто тоже кухню ищет.
J’ai essayé plusieurs sites sans jamais être convaincu. Télécharger un fichier fiable devenait vraiment compliqué. Après avoir suivi les étapes dans le bon ordre, tout a fonctionné. J’ai finalement déniché la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: 1xbet application 1xbet application. Voilà, pour être clair — la dernière version est super fluide et intuitive.
l’installation était rapide et sans complication. Pour être honnête, c’est la plus stable que j’ai testée — ne perdez plus votre temps avec d’autres sites. Bonne chance à tous…
ConextSolution hadir sebagai penyedia solusi ERP
dan transformasi digital yang membantu perusahaan meningkatkan efisiensi
operasional melalui odoo ERP, SAP System, Business Intelligence,
dan integrasi sistem. Sebagai partner teknologi odoo
indonesia, kami menawarkan layanan implementasi odoo, jasa implementasi
odoo, serta konsultasi dari tim odoo consultant indonesia yang berpengalaman.
Kami juga menyediakan jasa ERP indonesia untuk berbagai
industri, termasuk ERP manufacturing indonesia dan ERP retail indonesia.
Berbekal pengalaman dalam berbagai proyek, implementasi ERP perusahaan dapat berjalan lebih efektif dan sesuai kebutuhan bisnis.
Fokus kami adalah membantu perusahaan membangun sistem ERP
untuk bisnis yang lebih efisien, mendukung pertumbuhan bisnis, dan mampu mendorong transformasi digital
di era digital saat ini.
Je cherchais une application mobile de qualité pour mes paris. Télécharger un fichier sûr devenait un vrai casse-tête chinois. J’ai vérifié les dernières mises à jour pour lancer le processus sans erreur. J’ai finalement trouvé la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: xbet apk xbet apk. Voilà, pour être clair net et précis — après l’avoir installée, j’étais vraiment bluffé.
les mises à jour se font toutes seules sans intervention. Je vous fais part de mon retour d’expérience — ne perdez plus un seul instant avec d’autres sites. Bonne chance à toutes et tous…
Долгое время искал нормальный источник — какой способ действительно работает для перевода денег за границу онлайн. Нашёл подробный анализ ситуации: трансграничные платежи в условиях санкций https://mezhdunarodnye-platezhi-fra.ru Суть в следующем — курс конвертации может существенно отличаться. Дело в том, что любой трансграничный платёж — имеет свои нюансы в зависимости от выбранного способа. Также стоит отметить — прежде чем отправлять средства стоит проверить итоговую сумму. Без этого можно столкнуться с неожиданными расходами. В итоге — необходимо проверять информацию перед любой отправкой средств.
Ребята всем привет. Заколебался я уже выбирать. То ДСП сыпется. Короче, мужики с руками из правильного места — купить заказать кухню под ключ. Замер на следующий день. В общем, сохраняйте — купить готовую кухню спб https://zakazat-kuhnyu-qwe.ru Не ведитесь на салоны. Сам мучался теперь знаю.
Слушайте кто ремонт затеял. Замучился я уже кухню искать. То фасады покоробились от пара. Короче, нашел нормальных производителей — купить готовую кухню в спб с фурнитурой. Сделали за 2 недели включая замер. В общем, сохраняйте в закладки — где купить кухню в спб где купить кухню в спб Проверяйте производителя по этому списку. Сам полгода выбирал теперь знаю.
Ça faisait un moment que je voulais essayer ce site. Je ne trouvais pas la version officielle sur le Play Store. Après avoir suivi les étapes dans le bon ordre, tout a fonctionné. J’ai finalement déniché la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: 1xbet download android 1xbet download android. En deux mots, laissez-moi vous expliquer — l’appli tourne parfaitement sur mon smartphone.
les mises à jour se font automatiquement. Pour être honnête, c’est la plus stable que j’ai testée — croyez-moi, vous ne serez pas déçus, essayez-la sans hésiter. Je vous souhaite plein de réussite et de bons gains…
Слушайте кто в теме. Цены космос а качество мыло. Короче, нашел нормальный вариант — купить кухню в спб напрямую. Фурнитура Blum. В общем, смотрите по ссылке — купить готовую кухню спб купить готовую кухню спб Не ведитесь на салоны. Перешлите тому кто ищет.
J’ai testé plusieurs plateformes sans grand succès. Je n’arrivais pas à trouver la version officielle sur le Play Store. Après avoir suivi les étapes dans le bon ordre, tout a fonctionné. J’ai finalement déniché la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: 1xbet android http://www.twittercal.com. En deux mots, laissez-moi vous expliquer — l’appli tourne parfaitement bien sur mon téléphone.
l’installation était rapide et simple, pas de tracas. Pour être honnête, c’est la plus stable que j’aie trouvée — croyez-moi, vous ne serez pas déçus, essayez-la sans hésiter. Je vous souhaite plein de réussite et de bons gains…
Люди помогите советом. Прошерстил кучу салонов — одни перекупы. То сроки изготовления по полгода обещают. Короче, единственные кто не наваривается в тридорога — заказать кухню напрямую у производителя. Цены ниже чем в салонах тысяч на 30-40. В общем, жмите чтобы не потерять контакт — где купить готовую кухню в спб https://zakazat-kuhnyu-rty.ru Проверяйте производителя по этому списку. Перешлите тому кто тоже мучается выбором.
Je cherchais une application mobile de qualité pour mes paris. Télécharger un fichier sûr devenait un vrai casse-tête chinois. Après avoir suivi les étapes dans le bon ordre, tout a fonctionné. J’ai finalement trouvé la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: xbet apk xbet apk. Bref, ce que je voulais vous dire — l’appli tourne super bien sur mon téléphone.
l’installation était rapide comme l’éclair. Je vous fais part de mon retour d’expérience — croyez-moi, vous ne le regretterez pas, tentez le coup. Je vous souhaite plein de réussite et de gros gains…
Народ привет. Задолбался я выбирать кухню уже полгода. Икею всю излазил — не то. Короче, единственные кто не наебывает — купить готовую кухню в спб из наличия. Фурнитура Blum а не говно. В общем, жмите чтобы не потерять контакты — заказать кухню заказать кухню Проверяйте производителя в этом списке. Сам полгода мучился теперь делюсь.
Люди помогите советом Прошерстил кучу салонов — везде перекупы То сроки по полгода обещают Короче, нашел наконец нормальное производство — заказ кухни с доставкой и сборкой Цены ниже чем в салонах тысяч на 30 В общем, жмите чтобы не потерять контакты — заказать кухню в спб от производителя недорого https://kuhni-spb-uio.ru Проверяйте производителя по этому списку Сам столько нервов потратил теперь делюсь
Ça faisait un moment que je voulais essayer ce site. Télécharger un fichier fiable devenait vraiment galère. J’ai vérifié les dernières mises à jour pour lancer le processus sans erreur. J’ai finalement déniché la bonne source et je voulais vous partager tous les détails, vous pouvez consulter les informations à jour ici: 1xbet inscription 1xbet inscription. Bref, ce que je voulais vous dire — la dernière version est super fluide et intuitive.
l’installation était rapide et sans complication. J’ai comparé plusieurs apps mais celle-ci est la meilleure — croyez-moi, vous ne serez pas déçus, essayez-la sans hésiter. Bonne chance à tous…
Народ привет. Фурнитуру ставят дешманскую. Короче, единственные кто не наебывает — купить кухню в спб напрямую. Цены ниже на 30%. В общем, смотрите по ссылке — купить кухню в спб купить кухню в спб Не ведитесь на салоны. Перешлите тому кто ищет.
Слушайте кто ремонт затеял. Замучился я уже кухню искать. То фасады покоробились от пара. Короче, единственные кто делает совестливо — купить готовую кухню в спб с фурнитурой. Сделали за 2 недели включая замер. В общем, вся инфа вот тут — купить кухню производителя в спб купить кухню производителя в спб Не ведитесь на салоны-прокладки с накруткой. Сам полгода выбирал теперь знаю.
Thanks for sharing your thoughts about casino rewviews.
Regards
Thankfulness to my father who informed me concerning this web site,
this webpage is genuinely amazing.
Ребята всем привет. Цены задрали как на золото. То доставку месяц ждать. Короче, реальное производство в Питере — купить кухню в спб с доставкой. Цены ниже чем в магазинах тысяч на 50. В общем, там цены и каталог — где купить кухню в спб https://zakazat-kuhnyu-qwe.ru Не ведитесь на салоны. Перешлите кому надо.
Народ всем привет. В Леруа Мерлен посмотрел — качество ужас. То материал эконом — покоробится через месяц. Короче, единственные кто не наваривается в тридорога — купить кухню в спб с доставкой и сборкой. Цены ниже чем в салонах тысяч на 30-40. В общем, сохраняйте себе в закладки на будущее — купить готовую кухню спб https://zakazat-kuhnyu-rty.ru Проверяйте производителя по этому списку. Сам столько нервов потратил теперь делюсь.
p2p plattformen
Здорова, Питер Задолбался я уже кухню искать То фасады перекошены Короче, мужики с руками из нужного места — заказать кухню с фурнитурой Blum Сделали за три недели как обещали В общем, смотрите сами по ссылке — купить кухню в спб от производителя купить кухню в спб от производителя Проверяйте производителя по этому списку Перешлите тому кто тоже мучается
Народ кто в теме Оббегал все салоны в городе — везде одно и то же То ЛДСП 16 мм а не 18 Короче, нашел нормальных производителей — заказать кухню по индивидуальным размерам Цены ниже рыночных на треть В общем, жмите чтобы не потерять — кухня по индивидуальному заказу спб https://kuhni-spb-ytr.ru Проверяйте производителя по этому списку Сам полгода выбирал теперь знаю
Ребята кто в Питере Качество пластилин То ДСП сыпется Короче, реальное производство в Питере — кухни в спб от производителя с гарантией Сделали за три недели как обещали В общем, смотрите сами по ссылке — кухни на заказ производство спб кухни на заказ производство спб Не ведитесь на салоны-прокладки с наценкой 200% Перешлите тому кто тоже мучается
Народ кто в теме. Менеджеры врут про сроки и материалы. То доставку три месяца ждать. Короче, единственные кто делает совестливо — купить кухню спб в наличии. Гарантия 5 лет на все. В общем, смотрите сами по ссылке — купить кухню спб купить кухню спб Проверяйте производителя по этому списку. Перешлите другу кто тоже мучается.
solana casino online https://sol-casino-liste.de/
Have you ever considered creating an e-book or guest authoring on other
blogs? I have a blog based upon on the same topics you discuss and would really like to have you share some stories/information. I know my visitors would enjoy your work.
If you’re even remotely interested, feel free to send me an e-mail.
888starz kz https://888-uz6.com/
Люди подскажите. Обещают одно а по факту другое. То ДСП сыпется. Короче, мужики с руками из правильного места — купить кухню в спб с доставкой. Сделали за три недели. В общем, вся инфа вот здесь — купить готовую кухню спб https://zakazat-kuhnyu-qwe.ru Проверяйте по этому списку. Перешлите кому надо.
888statz https://888-uz5.com/
Доброго времени Прошерстил кучу салонов — везде одни перекупы То ЛДСП 16 мм а не 18 Короче, реальные ребята с цехом в СПб — купить кухню в спб от производителя с установкой Замерщик приехал на следующий день В общем, вся инфа вот здесь — кухни под заказ в спб https://kuhni-spb-wxh.ru Не ведитесь на салоны в ТЦ которые просто заказывают у китайцев и ставят наценку 100% Сам столько нервов потратил теперь делюсь опытом
Слушайте кто делал ремонт. Вечно то цены конские у дилеров. Икею всю излазил — не то. Короче, реальные производители с совестью — купить заказать кухню по индивидуальным размерам. Сделали за три недели. В общем, там каталог и цены и отзывы реальные — где купить кухню в спб https://zakazat-kuhnyu-gkl.ru Проверяйте производителя в этом списке. Перешлите тому кто тоже кухню ищет.
I completely agree with the current property development trends in the region. Finding the right Interior design Malaysia partner
is certainly a top consideration for new homeowners today.
In the Selangor area, working with an Interior designer Selangor
who carries the reputation of being among the Top interior designers KL
is vital in ensuring quality. I’ve noticed that the Design and build interior design Malaysia model offered by Jolivin Interiors provides
a highly efficient solution, particularly when it comes to precision-engineered
Custom kitchen cabinet Malaysia work. For those residing in the suburbs, Interior design Puchong
is seeing massive growth, and the range of Interior design services Klang Valley is more impressive than ever.
Thanks for sharing this information; it adds a lot of value
to my Residential interior design Malaysia research!
Доброго дня, земляки Объездил полгорода салонов — везде перекупы То фасады перекошены Короче, реальное производство в Питере — кухни на заказ по индивидуальным размерам Кромка немецкая 2 мм В общем, сохраняйте в закладки — ленинградские кухни ленинградские кухни Не ведитесь на салоны-прокладки с наценкой 100% Перешлите тому кто тоже мучается
Слушайте кто ремонт затеял Оббегал все салоны в городе — везде одно и то же То кромка кривая через раз Короче, реальный цех в СПб без наценок — кухни на заказ с доставкой и сборкой Цены ниже рыночных на треть В общем, вся инфа вот тут — кухни на заказ от производителя в спб кухни на заказ от производителя в спб Не ведитесь на салоны-прокладки с накруткой Перешлите другу кто тоже мучается
Народ всем привет Обещают одно а по факту другое То доставку месяц ждать Короче, нашел наконец нормальную контору — кухни СПб от производителя без посредников Сделали за три недели как обещали В общем, вся инфа вот здесь — кухни на заказ санкт петербург https://kuhni-spb-nbg.ru Проверяйте производителя по этому списку Перешлите тому кто тоже мучается
Hi! I just would like to give you a huge thumbs up for the excellent information you have got here on this post.
I’ll be returning to your web site for more soon.
Prêt Participatif: An Innovative Crowdfunding Solution for Business Financing
Всем привет из Питера Прошерстил кучу салонов — везде одни перекупы То кромка отклеивается через месяц Короче, нашел наконец нормальное производство — кухни в спб от производителя из массива Сделали 3D-проект бесплатно за час В общем, там каталог с ценами и реальные отзывы — ленинградские кухни https://kuhni-spb-wxh.ru Проверяйте производителя по этому списку Сам столько нервов потратил теперь делюсь опытом
References:
Seminole hard rock casino https://gogolive.biz/@deweyhickson3?page=about
Android telefonum için güvenilir bir apk arıyordum uzun zamandır. Herkes farklı bir link atıyordu kime güveneceğimi şaşırdım. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil apk 1xbet mobil apk. Yani anlatmak istediğim şu — mobil versiyonu gerçekten masaüstünü aratmıyor.
Hiçbir sorun yaşamadım yükleme aşamasında. Birçok apk denedim ama en iyisi bu çıktı — en stabil uygulama bu oldu artık. Herkese hayırlı olsun…
Салют, земляки Прошерстил кучу салонов — везде одни перекупы То фасады кривые с зазорами Короче, единственные кто не наваривается в тридорога — кухни в спб от производителя из массива Цены ниже чем в салонах тысяч на 30-40 В общем, смотрите сами по ссылке — кухни на заказ спб каталог https://kuhni-spb-wxh.ru Проверяйте производителя по этому списку Сам столько нервов потратил теперь делюсь опытом
Народ кто в теме Оббегал все салоны в городе — везде одно и то же То фасады покоробились от пара Короче, реальный цех в СПб без наценок — купить кухню в спб от производителя недорого Сделали за 2 недели включая замер В общем, там цены и примеры работ — заказать кухню спб заказать кухню спб Не ведитесь на салоны-прокладки с накруткой Перешлите другу кто тоже мучается
https://krasnodar.en.cx/Guestbook/Messages.aspx?page=1&fmode=gb&topic=400709&anchor#8005263 topclimat.ru
источник
Переподготовка по семейному консультированию дистанционно: современное решение профессионального развития
1xbet mobil uygulamasını indirmek istiyordum valla. Play Store’da arattım ama resmi olanı bulamadım. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda güvendiğim bir kaynağa ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet apk 1xbet apk. Yani anlatmak istediğim şu — mobil versiyonu gerçekten masaüstünü aratmıyor.
güncellemeleri de düzenli olarak geliyor. Kendi deneyimlerimi aktarıyorum size — en stabil uygulama bu oldu artık. Umarım siz de memnun kalırsınız…
บทความนี้ อ่านแล้วเข้าใจง่าย ครับ
ผม ไปอ่านเพิ่มเติมเกี่ยวกับ หัวข้อที่คล้ายกัน
สามารถอ่านได้ที่ Darryl
น่าจะถูกใจใครหลายคน
เพราะอธิบายไว้ละเอียด
ขอบคุณที่แชร์ เนื้อหาดีๆ นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
Android telefonuma güvenle yükleyebileceğim bir uygulama arıyordum. Güvenilir bir kaynak bulmak gerçekten çileydi. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda sağlam bir adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet apk 1xbet apk. Valla bak net söyleyeyim — mobil versiyonu her şeyi thinkmüş resmen.
güncellemeleri de düzenli yapılıyor. Birçok apk denedim ama en başarılısı bu çıktı — en güvenilir uygulama bu oldu artık. Herkese hayırlı olsun…
Люди помогите советом Решил санузел немного расширить Разрешения эти дурацкие Нервов просто не осталось Короче, единственные кто берётся за всё — услуги по перепланировке квартир под ключ И чертежи сделали В общем, вся инфа вот здесь — услуги по согласованию перепланировки услуги по согласованию перепланировки Потом себе дороже выйдет Перешлите тому кто тоже ремонт затеял
скачать 888 старс на айфон скачать 888 старс на айфон.
Mobil bahis için doğru apk dosyasını bulmak epey zordu valla. Güvenilir bir kaynak bulmak gerçekten çileydi. Adımları doğru sırayla uyguladıktan sonra erişim sorunsuz açıldı. En sonunda sağlam bir adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet yukle android 1xbet yukle android. Valla bak net söyleyeyim — android uygulaması gerçekten hızlı ve akıcı çalışıyor.
güncellemeleri de düzenli yapılıyor. İşin doğrusunu söylemek gerekirse — kesinlikle pişman olmazsınız deneyin derim. Herkese hayırlı olsun…
Люди подскажите Замучился я уже с этим согласованием Оказывается без бумажки ты никто Нервов просто нет Короче, ребята реально толковые — заказать проект перепланировки квартиры недорого И в инспекцию подали В общем, смотрите сами по ссылке — проект перепланировки квартиры проект перепланировки квартиры Потом себе дороже Перешлите тому кто ремонт затеял
Слушайте кто перевёл на дистант Учителя бесят своими требованиями А ещё эти поборы в классе Я уже голову сломал Короче, ребята реально толковые — онлайн обучение для школьников в удобное время Учителя реально знают своё дело В общем, там и программа и отзывы — образовательные онлайн школы https://shkola-onlajn-krt.ru Не мучайте детей Перешлите другим родителям кто устал от школы
Нужна бесплатная юридическая консультация? Переходите по запросу вопрос юристу онлайн бесплатно без телефона в Тюменской области и получите помощь опытных правозащитников в любой области права: семейные споры, долги и кредиты, недвижимость, трудовые конфликты, защита прав потребителей и многое другое. Задайте вопрос онлайн или по телефону и получите подробный разбор вашей ситуации и рекомендации адвоката по дальнейшим действиям. Консультация проводится бесплатно и конфиденциально.
Слушайте кто с ремонтом Затеял ремонт в хрущёвке Без проекта даже думать нечего Я уже намучился Короче, единственное что реально работает — перепланировка квартиры в Москве с гарантией И согласуют без проблем В общем, там и примеры и цены — перепланировка в москве https://pereplanirovka-kvartir-ksd.ru Не тяните Перешлите тому кто затеял ремонт
Народ кто в Москве Замучился я с перепланировкой А тут оказывается столько бумаг Нервов просто не осталось Короче, нашел наконец нормальных специалистов — узаконивание перепланировки без нервотрёпки Всё за месяц закрыли В общем, там и примеры и расценки — услуги по согласованию перепланировки услуги по согласованию перепланировки Не начинайте без проекта Перешлите тому кто тоже ремонт затеял
I completely agree with the current home renovation trends in the region. Selecting the right Interior design Malaysia
partner is undoubtedly a top consideration for new homeowners today.
In the Selangor area, working with an Interior designer
Selangor who carries the reputation of being among the Top interior designers KL really helps in ensuring quality.
I’ve noticed that the Design and build interior design Malaysia model offered by Jolivin Interiors provides a highly efficient solution, particularly when it comes to precision-engineered Custom kitchen cabinet Malaysia work.
For those residing in the suburbs, Interior design Puchong is seeing massive growth, and the range of Interior design services Klang Valley is more impressive than ever.
Thanks for sharing this information; it adds a lot of value to my Residential interior design Malaysia research!
Android telefonuma güvenle yükleyebileceğim bir uygulama arıyordum. Play Store’da resmi uygulamayı bulamayınca çok hayal kırıklığı yaşadım. Sonunda tüm teknik detayları inceleyip sistemi test ettim. En sonunda sağlam bir adrese ulaştım ve size de tüm detayları aktarmak istedim, güncel bilgilere buradan bakabilirsiniz: 1xbet mobil apk 1xbet mobil apk. Valla bak net söyleyeyim — telefonuma kurduğuma çok memnunum.
kurulumu da oldukça basit ve anlaşılırdı yani rahat olun. Birçok apk denedim ama en başarılısı bu çıktı — kesinlikle pişman olmazsınız deneyin derim. Şimdiden iyi şanslar ve bol kazançlar…
It’s an amazing article in favor of all the internet
users; they will get advantage from it I am sure.
Слушайте кто ищет нормальную школу Учителя со своими закидонами А знаний реальных ноль Короче, нашли отличный выход — онлайн обучение для школьников в удобном режиме Преподаватели реально крутые В общем, вся инфа вот здесь — интернет школы https://shkola-onlajn-vem.ru Переходите на нормальное обучение Перешлите другим родителям
Ребята кто в Москве Хочу снести стену между кухней и комнатой Штрафы огромные если без разрешения Нервов просто нет Короче, единственные кто делает быстро — проект перепланировки и переустройства квартиры полный пакет И в инспекцию подали В общем, сохраняйте себе — проект перепланировки квартиры проект перепланировки квартиры Не начинайте без проекта Перешлите тому кто ремонт затеял
Качественный дженерик сиалис купить в москве помогли менеджеры.
https://telegra.ph/Levitra-kupit-v-moskve-v-apteke-06-23
I think the admin of this site is really working hard in support
of his web site, because here every stuff is quality based material.
Отличный магазин, помог быстро дженерик сиалис купить в москве с доставкой.
https://telegra.ph/Dapoksetin-s3-kupit-06-23
Долго искал сиалис дженерик, тут оказался самый лучший выбор.
https://telegra.ph/Dzheneriki-v-Moskve-bez-predoplaty-06-23
смм накрутка https://smm-nakrutka-01.ru
Народ кто в Москве Решил санузел немного расширить Инспекция не пропускает ничего Потратил кучу времени впустую Короче, ребята реально толковые — услуги по согласованию перепланировки в Мосжилинспекции И чертежи сделали В общем, там и примеры и расценки — узаконить перепланировку москва https://pereplanirovka-kvartir-owy.ru Потом себе дороже выйдет Перешлите тому кто тоже ремонт затеял
UU88 là cổng game giải trí trực tuyến uy tín hàng đầu năm 2026, mang đến hệ
sinh thái cá cược đa dạng gồm thể thao, casino trực tuyến, nổ hũ, bắn cá và game
bài đổi thưởng. Với nền tảng công nghệ hiện đại, giao dịch siêu tốc cùng hệ thống bảo mật đạt
chuẩn quốc tế, UU88 COM đang trở thành lựa
chọn hàng đầu của hàng triệu người chơi tại Việt Nam và khu vực châu Á.
Đặc biệt, mùa World Cup 2026 đang diễn ra sôi
động tại Mỹ – Canada – Mexico, UU88 triển khai chương trình Đập Trứng May Mắn với tổng
giá trị giải thưởng lên tới 108.888K,
mang đến cơ hội săn thưởng cực lớn dành cho tất cả hội viên.
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который упрощает навигацию, поиск товаров и управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования условного депонирования,
что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с внимательным отношением к безопасности клиентов, что делает процесс покупок более предсказуемым, защищенным
и, как следствие, популярным среди пользователей,
ценящих анонимность и надежность.
Superb site you have here but I was curious about if you knew of any community forums that
cover the same topics discussed in this article? I’d really like
to be a part of group where I can get suggestions from other experienced people that
share the same interest. If you have any suggestions, please let me know.
Kudos!
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный
ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который упрощает навигацию, поиск товаров
и управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров
(диспутов) и возможность использования условного депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность
сочетается с внимательным отношением к
безопасности клиентов, что
делает процесс покупок более
предсказуемым, защищенным и, как следствие, популярным среди пользователей,
ценящих анонимность и надежность.
Мамы и папы отзовитесь Каждое утро как на войну собираться Ребёнок к вечеру как выжатый лимон Короче, нашли отличный выход — онлайн обучение для школьников в удобном режиме Уроки в комфортное время В общем, смотрите сами по ссылке — сайт онлайн образования https://shkola-onlajn-vem.ru Переходите на нормальное обучение Перешлите другим родителям
I completely agree with the current home
renovation trends in the region. Finding the right Interior design Malaysia
partner is certainly a top priority for new homeowners today.
In the Selangor area, working with an Interior designer Selangor
who carries the reputation of being among the Top interior designers
KL really helps in minimizing stress. I’ve noticed that
the Design and build interior design Malaysia model offered by Jolivin Interiors provides a seamless solution, particularly when it comes
to bespoke Custom kitchen cabinet Malaysia work.
For those residing in the suburbs, Interior design Puchong is seeing
massive growth, and the range of Interior design services Klang Valley is more impressive than ever.
Greatly appreciate this information; it adds a lot of value to my Residential interior
design Malaysia research!
Howdy I am so excited I found your web site, I
really found you by error, while I was looking on Digg for something else, Nonetheless I
am here now and would just like to say thanks
a lot for a fantastic post and a all round
thrilling blog (I also love the theme/design), I don’t have time
to browse it all at the moment but I have bookmarked it and also
included your RSS feeds, so when I have time I will be back to read
more, Please do keep up the fantastic work.
Люди подскажите Планирую объединить две комнаты в гостиную Оказывается без бумажки ты никто Я уже голову сломал Короче, единственные кто делает быстро — проект перепланировки и переустройства квартиры полный пакет И техзаключение сделали В общем, там и примеры и цены — заказать проект перепланировки квартиры в москве https://proekt-pereplanirovki-kvartiry-hmf.ru Потом себе дороже Перешлите тому кто ремонт затеял
Народ кто с детьми Вечно эти сборы в 8 утра То ремонт, то экскурсии, то подарки Перепробовал кучу вариантов Короче, ребята реально толковые — онлайн обучение для школьников в удобное время Учителя реально знают своё дело В общем, там и программа и отзывы — дистанционное обучение в москве https://shkola-onlajn-krt.ru Переводите на нормальное обучение Перешлите другим родителям кто устал от школы
Привет родителям Задолбали эти сборы в 7 утра А поборы в классе просто бесят Короче, единственная школа которая работает — онлайн обучение для детей в комфортном темпе Уроки в удобное время В общем, смотрите сами по ссылке — лбс это лбс это Хватит мучить себя и ребёнка Перешлите другим родителям
Здорова родители Домашка на весь вечер Никакого интереса к знаниям Короче, реально удобный формат учёбы — школа онлайн с индивидуальным расписанием Уроки тогда когда удобно В общем, там программа и отзывы — lbs это lbs это Хватит мучить себя и ребёнка Перешлите другим родителям
Кто устал от обычной школы Домашка до ночи А эти бесконечные ремонты в классе Короче, реально удобный и простой — онлайн обучение для детей в любое время Никаких нервов В общем, там программа и условия — онлайн школа в москве https://shkola-onlajn-bxf.ru Переходите на дистанционное обучение Перешлите другим родителям
Ребята у кого дача Сроки срывают постоянно То столбы гнутые Короче, мужики с руками из правильного места — заборы под ключ в Москве с гарантией И установили всё чисто В общем, смотрите сами по ссылке — 3D забор под ключ 3D забор под ключ Проверяйте производителя по этому списку Перешлите тому у кого участок
Japanese Grownup Videos are available for completely on AsianTube.
And if you’re unfamiliar with Asian sex wording, JAV is exactly as
it sounds: Japanese adult videos. For all the naked women and the nasty things they’re doing,
it’s not adult-rated for swearing or crime. And that’s simply the kind of content we all enjoy watching on this site.
ASIAN TUBE https://holidaydeal.it/author-profile/carrilaguerre9/
QS88 là nền tảng giải trí trực tuyến được đông đảo người chơi tại
Việt Nam tin chọn nhờ giao diện hiện đại, tốc độ xử lý nhanh và hệ sinh
thái đa dạng từ thể thao, casino live đến slot đổi thưởng.
Trải nghiệm thực tế cho thấy quy trình nạp rút
tại QS88 diễn ra ổn định chỉ từ 1–3 phút, thao tác đơn giản trên cả điện thoại
lẫn máy tính, phù hợp cho cả người mới lẫn hội viên lâu năm.
Bên cạnh ưu đãi hấp dẫn và kèo được cập nhật liên tục, nền tảng còn ghi
điểm với hệ thống bảo mật nhiều lớp, giao
dịch minh bạch và môi trường giải trí an toàn 24/7.
Ребята у кого производство Сроки поставки по три месяца То кран-балки с зазорами Короче, мужики которые реально делают качественно — подъемное оборудование для производства любой сложности Цены ниже чем у перекупов на 20% В общем, вся инфа вот здесь — рычажная таль купить https://tal-elektricheskaya.ru Проверяйте производителя по документам Перешлите тому кто ищет оборудование
Мамы и папы всем привет А домашние задания на 5 часов в день Нервный как спичка Короче, нашли крутую альтернативу — онлайн школы для детей с индивидуальным графиком Аттестат как у всех В общем, жмите чтобы не потерять — образовательные онлайн школы https://shkola-onlajn-pqs.ru Хватит мучить себя и ребёнка Перешлите другим родителям
Всем привет родители Каждый день как на работу Вечно больной и уставший Короче, школа где ребёнку комфортно — онлайн школы с зачислением из любого города Аттестат настоящий как в обычной школе В общем, жмите чтобы не потерять — онлайн обучение школа https://shkola-onlajn-bxf.ru Не мучайте себя и детей Перешлите другим родителям
This post does a really nice job of combining thoughtful discussion with an natural writing style, which helps create a reading experience that feels comfortable, accessible, and open to different interpretations and opinions.
FEZ bet
Слушайте кто забор ставил Объездил кучу контор — везде одно и то же То профлист тонкий как бумага Короче, нашел нормальных ребят — монтаж заборов под ключ с материалами Замер на следующий день В общем, вся инфа вот здесь — монтаж забора из профнастила монтаж забора из профнастила Проверяйте производителя по этому списку Перешлите тому у кого участок
Мамы и папы всем привет Каждое утро как каторга Никакого интереса к знаниям Короче, школа без стресса и скандалов — школы дистанционного обучения с настоящими учителями Уроки тогда когда удобно В общем, сохраняйте себе — онлайн обучение онлайн обучение Хватит мучить себя и ребёнка Перешлите другим родителям
An outstanding share! I’ve just forwarded this onto a friend who was
doing a little homework on this. And he actually bought me dinner because I found it for him…
lol. So allow me to reword this…. Thank YOU for the meal!!
But yeah, thanx for spending the time to discuss this matter here on your
web site.
Слушайте кто устал от обычной школы А домашние задания на 5 часов в день Никакого интереса к учёбе Короче, нашли крутую альтернативу — школа онлайн с лицензией и зачислением Никаких звонков и перемен В общем, вся инфа вот здесь — образовательные онлайн школы https://shkola-onlajn-pqs.ru Хватит мучить себя и ребёнка Перешлите другим родителям
Народ всем привет Сроки поставки по три месяца То тали бракованные Короче, реальный завод в Москве — грузоподъемное оборудование от производителя Цены ниже чем у перекупов на 20% В общем, вся инфа вот здесь — цепная электрическая таль цепная электрическая таль Проверяйте производителя по документам Перешлите тому кто ищет оборудование
Владельцы участков отзовитесь Обещают одно а по факту другое То профлист тонкий как бумага Короче, реальное производство в Москве — установка заборов в Московской области недорого Гарантия на все работы В общем, смотрите сами по ссылке — заказать забор под ключ заказать забор под ключ Проверяйте производителя по этому списку Перешлите тому у кого участок
I think this post works really well because it explains the topic in a relaxed and easy-to-follow way while also keeping enough substance and structure to make the discussion feel worth reading and worth paying attention to.
Watch sexual porno video xxx sex adults site
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие
многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент,
представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который упрощает навигацию, поиск
товаров и управление заказами даже
для новых пользователей.
В-третьих, продуманная система безопасных транзакций,
включающая механизмы разрешения споров (диспутов) и возможность использования
условного депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с внимательным
отношением к безопасности клиентов,
что делает процесс покупок более предсказуемым,
защищенным и, как следствие, популярным среди пользователей, ценящих
анонимность и надежность.
What I appreciate most here is how pleasant the post is to read while still managing to feel meaningful, since the discussion stays balanced and engaging without becoming too heavy for readers to follow closely.
在线购买无处方安定片 xxx Pornhub
Народ у кого дети Домашка до ночи А эти бесконечные ремонты в классе Короче, реально удобный и простой — школа онлайн с лицензией и зачислением Уроки по расписанию который сам выбираешь В общем, жмите чтобы не потерять — интернет школы https://shkola-onlajn-bxf.ru Не мучайте себя и детей Перешлите другим родителям
I am really glad I clicked on this link, because the breakdown provided here is exactly what I needed to get a better grasp of the current situation and understand the broader context behind everything you have laid out so clearly.
viagra pills sexual xxx porn pills
It is quite rare to find a summary that hits all the right notes without drifting off-topic, but your post remained focused and delivered a very satisfying reading experience from the very first paragraph.
在线购买无处方安定片 xxx Pornhub
Pozdravljeni. Že dolgo sem iskal resnično rešitev. Ko gre za odvajanje od alkohola — veliko ljudi se muči v tišini. Prijatelj mi je priporočil en center, kjer ne obetajo nemogočega. Govorim o Dr Vorobjev centru. Več informacij je na voljo tu: odvajanje od alkohola odvajanje od alkohola Meni so res pomagali. Odvisnost od alkohola je bolezen, ne sramota. Ampak ko enkrat najdeš pravo pomoč — življenje dobi nov smisel. Vsekakor priporočam vsem, ki se spopadajo s to težavo. Ne obupajte!
The amount of old ladies in each video and the number of females in common look to
be evenly spread. Grandma on another grandma, grandma on other grandpa,
mama on young lady, grandma on younger male, and so on. webpage https://studyonline.today/author/forrestmatting/
Details inside: Preservation Project at Acre Fortress
курсы английского курсы английского
Да уж, соседи уже устали слушать эти крики. Как есть — только срочный вывод из запоя. Ребята работают чисто. Между нами, вот нормальный расклад — вывод из запоя прайс https://vyvod-iz-zapoya-na-domu-voronezh-xrt.ru Хватит надеяться на авось. Лучше один раз дернуться, чем труп из квартиры выносить. Рекомендую эту наркологическую клинику.
Текущие рекомендации: https://slovarsbor.ru/w/%D0%B8%D0%BA/
Сексуальный контент широко доступен на
специализированных платформах для
зрелой аудитории. Выбирайте безопасные
сайты для обеспечения безопасности.
Here is my site … новые японские порносайты
Aviator provides a streamlined experience with clear visuals and easy-to-follow gameplay.
تحديث 888starz
تضم المنصة بوابات دفع مرنة تتيح إدارة الحسابات المالية بسهولة وأمان.
القسم الثاني:
تدعم هذه البيانات استراتيجيات مراهنة أكثر احترافية وتزيد من احتمالات النجاح.
القسم الثالث:
تسمح التحديثات المنتظمة بتقديم محتوى متجدد يجذب اللاعبين ويمنحهم خيارات متنوعة.
القسم الرابع:
تشجع 888starz eg على مراهنة مسؤولة وتقديم موارد لمن يحتاجون إلى مساعدة في التحكم.
زوروا 88starz للمزيد من المعلومات والعروض الخاصة.
في عالم الترفيه عبر الإنترنت، يشغل 888starz egypt مكانة بارزة بين المنصات المشهورة.
تقدم المنصة مجموعة متنوعة من الألعاب والخدمات المصممة لتلبية احتياجات اللاعبين. توفر المنصة باقة واسعة من الألعاب وخيارات الترفيه التي تناسب مختلف الأذواق.
تتميز الواجهة بسهولة الاستخدام وسرعة الاستجابة. تتفوق واجهة المستخدم في المنصة بوضوح التصميم وسرعة الأداء.
القسم الثاني:
تتضمن عروض 888starz egypt مكافآت ترحيبية للمشتركين الجدد. توفر 888starz egypt حزم مكافآت جذابة للمستخدمين الجدد.
كما توجد حملات ترويجية مستمرة لزيادة التفاعل مع اللاعبين. وتنظم المنصة عروضاً ترويجية دورية لتعزيز مشاركة المستخدمين.
تتنوع الجوائز بين رصيد مجاني ودورات لعب ومزايا خاصة. وتشمل الجوائز أرصدة مجانية وفرص لعب ومزايا إضافية للأعضاء.
القسم الثالث:
يعتمد محتوى 888starz egypt على مجموعة من المزودين العالميين للألعاب. يعتمد محتوى 888starz egypt على مجموعة من المزودين العالميين للألعاب.
هذا يضمن تنوعاً وجودة في الخيارات المتاحة للمستخدمين. ويؤدي ذلك إلى توفير مجموعة متنوعة وجودة متميزة في الألعاب المقدمة.
كما تلتزم المنصة بتحديث محتواها بانتظام لمواكبة التطورات. وتقوم المنصة بتجديد محتواها بشكل دوري لضمان تجربة معاصرة للمستخدمين.
القسم الرابع:
تولي 888starz egypt أهمية لأمان المعاملات وحماية البيانات الشخصية. تولي 888starz egypt أهمية لأمان المعاملات وحماية البيانات الشخصية.
تستخدم تقنيات تشفير وحلول دفع آمنة لتقليل المخاطر. تستخدم تقنيات تشفير وحلول دفع آمنة لتقليل المخاطر.
يمكن للمستخدمين التواصل مع دعم فني متوفر لمعالجة أي قضايا بسرعة. ويستطيع الأعضاء الاتصال بخدمة العملاء لحل المشكلات بسرعة وكفاءة.
تمثل الواجهة الرئيسية للموقع الرسمي 888starz مركزًا موحدًا يضم المراهنات الرياضية والكازينو معًا.
تتيح الواجهة الرئيسية مشاهدة المراهنات المباشرة وتغير الاحتمالات في الوقت الفعلي.
88 stars https://888starz-eg-africa.com/
تُبرز الواجهة الرئيسية ألعاب الكازينو الأكثر رواجًا وأحدث ماكينات السلوت.
تؤكد الصفحة الرئيسية على أن الموقع رسمي ومرخّص لضمان بيئة لعب آمنة.
???? ?????? ???????? ?????? ????? ??? ??? ??????? ???? ???????? ????? ????? ???.
???? ??? ??????? ?? 888starz ???? ?? 50 ????? ??????? ???? ??? ????? ?????? ???? ????? ????????? ???????????.
888 مراهنات https://eg888stars.com/
??? ??? ???????? ??? ?????? ?????? ?? ???? ?? ???? ???? ???? ?? ?????? ??????? ???????.
????? ??????? ???????? ???? ???????? ??????? ??????? ??????? ????????.
???? ?????? ??? ?????? ????????? ????????? ????? ?????? ????? ????????.
???? 888starz ??????? ?????? ??? ??? ?????? ?? ??????? ?? ???? ?????? ???????.
Ребята, попал в такую передрягу. Человек просто в штопоре. Думал уже всё. В больницу тащить страшно. Короче, единственное что реально помогло — адекватный вывод из запоя цены приемлемые. Поставили систему. В общем, там и контакты и прайс — выведение из запоя на дому выведение из запоя на дому Не тяните. Скиньте кому надо.
Слушайте ребята, такая херня приключилась. Родственник просто пропадает. Руки опустились. В платную клинику денег нет. Короче, врачи реально вытащили — адекватный вывод из запоя цены приемлемые. Поставили систему. В общем, там контакты и прайс — вывод из запоя недорого вывод из запоя недорого Не ждите. Сохраните себе.
Very nice article, exactly what I was looking for.
Hey There. I discovered your blog using msn. This is an extremely well written article.
I’ll make sure to bookmark it and return to read extra of your helpful information. Thank you for
the post. I will definitely comeback.
I will right away grasp your rss as I can not in finding
your e-mail subscription hyperlink or newsletter service.
Do you have any? Please permit me know so that I may just
subscribe. Thanks.
Люди, ситуация жуткая когда — человек уже пятый день под завязку. Жена в слезах. А скорая не едет. У меня брат так чуть не загнулся. Короче, единственное что реально вывезло — адекватный вывод из запоя цены нормальные. Поставили систему за 20 минут. В общем, жмите чтобы не потерять — цены на вывод из запоя на дому https://vyvod-iz-zapoya-na-domu-voronezh-jhg.ru Не тяните резину. Деньги потом не нужны будут. Перешлите тому кто в беде.
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил
доверие многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который упрощает навигацию,
поиск товаров и управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования условного депонирования,
что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность
сочетается с внимательным
отношением к безопасности клиентов, что делает процесс покупок
более предсказуемым, защищенным и, как следствие,
популярным среди пользователей, ценящих анонимность и надежность.
Thank you for every other informative website. The place else may just I get that kind of info written in such a perfect method?
I have a challenge that I am just now operating on, and I’ve been on the look
out for such information.
Everyone loves what you guys are usually up too.
This sort of clever work and coverage! Keep up the great works guys I’ve
you guys to my personal blogroll.
Летний лагерь с английским языком в YES Center — это полное погружение в среду. Дети общаются, играют и учатся одновременно, поэтому новые слова и фразы запоминаются легко, без зубрёжки. Опытные педагоги поддерживают каждого. Бронируйте места заранее.
Выбор хорошего онлайн-казино — задача важная. Сегодня индустрия азартных игр растет быстро, и выбрать лучшее место для игры не всегда просто.
Ребята привет. Попал в переплёт конкретный. Близкий человек уже шестой день в завязке. Дети не спят ночами. Платные клиники ломят космос. Короче, единственное что реально работает — срочный вывод из запоя круглосуточно. Поставили капельницу. В общем, вся информация вот здесь — вывод из запоя на дому вывод из запоя на дому Не тяните. Перешлите другу в беде.
If you have ever struggled to explain a haircut you want, this resource turns that uncertainty into a clear, visual result. After a quick selfie and a few quiz answers, it evaluates facial features, hair behavior, and lifestyle context to produce 10 tailored styles, realistic renderings, and barber instructions. Behind the result is not a simple filter, but a mathematical model with 50+ parameters and an anatomical 3D scan, designed to show how a cut fits. In other words, this is not a sticker-style app, but a system built on over 50 criteria, including 3D facial mapping, so you see a style grounded in measurable fit. Rather than generic “wig” overlays, the report presents lifelike previews that reflect actual shape and proportion. In addition, you get a clear haircut plan with practical parameters and stylist instructions, which helps turn the visual concept into an actual salon result. The entry point is straightforward, with a short analysis window and a PDF-style report that keeps everything in one place. At a time when ordinary apps still feel like simple overlays, this feels more like a digital rendering of a new self than a playful toy. https://hairstyleai.space/
Everything is very open with a clear description of the issues.
It was definitely informative. Your site is very useful. Thanks
for sharing!
Superb info, Appreciate it.
Слушайте сюда. Попал в такую передрягу. Брат пьёт без остановки. Жена в истерике. В диспансер везти — на всю жизнь учёт. Короче, только это и спасло — качественный вывод из запоя на дому. Приехали через час. В общем, вся инфа вот здесь — выведение из запоя на дому выведение из запоя на дому Не надейтесь на авось. Скиньте другу в беде.
Самарцы привет. Попал я в переплёт конкретный. Брат пьёт без остановки. Жена в слезах. Платные клиники просят бешеные деньги. Короче, единственное что реально помогло — вывести из запоя на дому качественно. Поставили систему. В общем, сохраняйте на будущее — вывести из запоя анонимно вывести из запоя анонимно Каждая минута дорога. Перешлите тому кому надо.
Платформа для откровенных материалов предлагает широкий выбор видео для взрослых развлечений.
Выбирайте безопасные сайты для
взрослых для конфиденциального опыта.
Народ привет. Столкнулся с такой бедой. Отец не выходит из запоя. Жена вся в слезах. В диспансер везти — на всю жизнь учёт. Короче, нормальные врачи нашлись — лучшая наркологическая клиника с выездом. Откачали за час. В общем, вся информация вот здесь — сколько стоит вывод из запоя https://vyvod-iz-zapoya-na-domu-voronezh-eio.ru Не надейтесь на авось. Скиньте другу в беде.
Przy dużej liczbie ofert ciężko znaleźć najlepsze kasyna https://www.meerwijs.com/faq-items/sed-eu-erat-ac-ligula-tristique-ullamcorper-quam/, więc porównanie na Kostki na Matmie może zaoszczędzić sporo czasu.
Друзья ситуация. Жесть случилась полная. Человек уже четвёртые сутки в штопоре. Дети не спят ночами. В диспансер везти — учёт на всю жизнь. Короче, нормальные врачи нашлись — лучшая наркологическая клиника с выездом. Приехали через час. В общем, смотрите сами по ссылке — выведение из запоя выведение из запоя Не тяните. Перешлите тому кому надо.
Друзья ситуация. Столкнулся с такой бедой. Близкий не выходит из запоя. Жена в слезах. Скорая не едет. Короче, только это и спасло — вывод из запоя дешево и сердито. Отошёл за полчаса. В общем, вся инфа вот здесь — снятие запоев на дому https://vyvod-iz-zapoya-na-domu-samara-ghi.ru Не тяните. Скиньте другу в беде.
Longreads and hits: https://barbapad.com
Слушайте что расскажу. Жесть случилась полная. Человек уже третьи сутки в штопоре. Соседи стучат в дверь. Скорая не едет. Короче, только это и спасло — вывести из запоя на дому качественно. Поставили систему. В общем, сохраняйте на будущее — снятие интоксикации на дому снятие интоксикации на дому Каждая минута дорога. Скиньте другу в беде.
Ищите откровенные видео, исследуя надежные платформы в Интернете.
Изучите надежные порнохабы
для приватного просмотра.
Everyone loves what you guys are up too. This type of clever work and reporting!
Keep up the amazing works guys I’ve you guys
to my blogroll.
Друзья ситуация. Столкнулся с такой бедой. Брат пьёт без остановки. Соседи стучат в дверь. В диспансер везти — учёт на всю жизнь. Короче, нормальные врачи нашлись — профессиональное выведение из запоя капельницей. Поставили систему. В общем, смотрите сами по ссылке — выведение из запоя цена https://vyvod-iz-zapoya-na-domu-samara-mno.ru Не тяните. Перешлите тому кому надо.
Люди подскажите То сайты виснут Категория земли Короче, единственный нормальный сервис — официальная публичная кадастровая карта с актуальными данными Скачал выписку сразу В общем, жмите чтобы не потерять — поиск по кадастровому номеру на карте поиск по кадастровому номеру на карте Не мучайтесь с росреестром Перешлите тому кто ищет участок
Народ выручайте. Попал я в переплёт конкретный. Брат пьёт без остановки. Дети не спят ночами. В диспансер везти — учёт на всю жизнь. Короче, единственное что реально помогло — вывести из запоя на дому качественно. Поставили систему. В общем, смотрите сами по ссылке — анонимный вывод из запоя анонимный вывод из запоя Не надейтесь на авось. Перешлите тому кому надо.
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории благодаря
сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент,
представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс
KRAKEN, который упрощает навигацию, поиск товаров и управление заказами даже
для новых пользователей. В-третьих,
продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования условного
депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с
внимательным отношением к безопасности клиентов, что делает процесс покупок более предсказуемым, защищенным и,
как следствие, популярным среди пользователей, ценящих анонимность и надежность.
Very rapidly this website will be famous amid all blogging visitors,
due to it’s fastidious posts
Люди помогите А в росреестре ждать по три недели Кадастровый номер вбить Короче, единственный сервис который не врет — публичная кадастровая карта с 3D-видом Скачал выписку за секунду В общем, жмите чтобы не потерять — кадастровая карта россии 2025 https://publichnaya-kadastrovaya-karta-ghi.ru Не парьтесь с росреестром Перешлите тому кто ищет участок
Wager safely at a fully licensed online casino offering premium software interfaces and robust digital encryption. Experience the true thrill of live blackjack, real-time roulette, and modern crash mechanics from any mobile device. Enjoy guaranteed fast track withdrawals and daily loyalty rewards tailored for continuous action.
https://www.robertfalconer.co.za/post/issue-13-franciscan-spirituality?commentId=c34d5271-0028-4afe-ae8c-90b9ab8d1650
Explore a massive catalog of high RTP online casino titles and progressive jackpot networks designed for elite players. Benefit from instant digital deposits, zero-fee withdrawals, and 24/7 dedicated customer support. Register now to unlock competitive match bonuses and elevate your regular gaming strategy.
https://www.greedirect.co.za/post/decorex-cape-town?commentId=27468e46-c8b7-45a0-a777-182cb7212fc0
Discover the ultimate online casino experience featuring top-tier video slots, classic table games, and immersive live dealers. Claim your exclusive high-value welcome package with flexible banking options and lightning-fast payout processing today. Start wagering securely with certified fair play systems and audited high-return games.
https://bestiptv000.blogspot.com/2026/06/online-slots-complete-guide-to-digital.html
My spouse and I absolutely love your blog and
find a lot of your post’s to be just what I’m looking
for. Does one offer guest writers to write content available for you?
I wouldn’t mind publishing a post or elaborating on many of the subjects you write regarding here.
Again, awesome site!
Choosing the perfect smartwatch dial is tricky due to the vast range of options available
يقدم الموقع الرسمي 888starz للاعبين المصريين بيئة آمنة تضم الكازينو والمراهنات الرياضية.
888starz تسجيل الدخول https://serveursio.ovh/index.php/888starz_%d8%aa%d8%b3%d8%ac%d9%8a%d9%84_%d8%a7%d9%84%d8%af%d8%ae%d9%88%d9%84:_%d8%b3%d9%84%d9%88%d8%aa%d8%b3_%d9%88%d9%85%d8%a8%d8%a7%d8%b1%d9%8a%d8%a7%d8%aa_%d9%88%d8%b1%d9%87%d8%a7%d9%86%d8%a7%d8%aa_%d9%81%d9%8a_%d9%85%d9%83%d8%a7%d9%86_%d9%88%d8%a7%d8%ad%d8%af
يحتوي 888starz على مكتبة واسعة من ألعاب الكازينو من شركات برمجيات موثوقة.
يقدم الموقع مراهنات على أهم الدوريات والأحداث الرياضية بمعدلات ربح مرتفعة.
يبرز 888starz أحدث البونصات والعروض في مكان سهل الوصول إليه.
يمكن تحميل تطبيق 888starz على الجوال للوصول إلى كل الأقسام بسرعة وسلاسة.
Слушайте кто участки ищет То карта виснет Категорию земли уточнить Короче, работает быстро и понятно — публичная кадастровая карта россии онлайн с обновлениями Увидел границы и форму участка В общем, смотрите сами по ссылке — реестр кадастровая карта https://publichnaya-kadastrovaya-karta-mno.ru Пользуйтесь нормальной картой Перешлите тому кто ищет участок
تحميل 888starz https://bloggerok.bloggersdelight.dk/2026/02/04/%d8%aa%d8%ad%d9%85%d9%8a%d9%84-888starz/
????? ??????? ???? ???? ?? ?????? ????? ????? ?? ????? ??????.
?? ?????? ????? ??????? ??? ????? ?????? ??? ???? ??????? ?????? ?????????.
???? ????? 888starz ????? ??????? ????? ?????? ?????? ???? ????? ???????.
????? ????? apk ???????? ?? ????? ?????? ?????? ??????? ????????.
???? ????? iOS ????? ???? ??????? ?????? ?????? ???????.
Sayt mahalliy o’yinchilar uchun tushunarli o’zbekcha interfeysni taqdim etadi.
Rasmiy saytdagi kazino bo’limi yetakchi provayderlardan ko’plab o’yinlarni o’z ichiga oladi.
888starz rasmiy sayti keng qamrovli sport tikishlarini bitta joyda taqdim etadi.
888starz rasmiy platformasi o’yin va tikishlar uchun himoyalangan muhit yaratadi.
888starz.com https://888starz-uzb1.com/
888star https://888starz-uzb2.com/
888starz rasmiy platformasi o’zbek foydalanuvchilariga kazino va tikishlarni bir joyda jamlaydi.
Rasmiy saytda top reytingli slotlar va yangi nashrlar alohida ajratiladi.
Rasmiy sayt orqali mahalliy va xalqaro chempionatlarga, jumladan O’zbekiston ligasiga tikish mumkin.
Rasmiy platforma foydalanuvchilar ma’lumotlari va mablag’larini ishonchli himoya qiladi.
Всем привет из сети То карта тормозит Категорию земли уточнить Короче, работает быстро и понятно — публичная кадастровая карта новая с просмотром Увидел границы и форму участка В общем, вся инфа вот здесь — карта по кадастровому номеру https://publichnaya-kadastrovaya-karta-jkl.ru Пользуйтесь нормальной картой Перешлите тому кто ищет участок
KKWin là nền tảng giải trí trực tuyến đẳng cấp,
chuyên cung cấp các dịch vụ cá cược đa dạng từ Thể thao, Casino trực
tuyến đến Nổ hũ và Xổ số. Với phương châm đặt trải nghiệm khách hàng lên hàng
đầu, KKWin cam kết mang đến một môi trường cá cược
minh bạch, hệ thống bảo mật tuyệt đối cùng tốc độ nạp rút siêu tốc,
khẳng định vị thế nhà cái uy tín hàng đầu thị trường hiện nay.
All the latest here: https://prague1shop.com
Самарцы всем привет. Попал я в переплёт конкретный. Близкий не выходит из запоя. Соседи стучат в дверь. Скорая не едет. Короче, нормальные врачи нашлись — срочный вывод из запоя круглосуточно. Поставили систему. В общем, смотрите сами по ссылке — частный вывод из запоя частный вывод из запоя Не тяните. Скиньте другу в беде.
Быстрый вызов врача на дом через прямые номера регистратур поликлиник без посредников.
https://www.bestdressedplate.com/author-profile/phillipkimbrou/
Качественные статьи врачей про детскую лихорадку, сохранила сайт в закладки.
https://calgaryhomeselect.com/author/colleenryv4400/
Thanks very interesting blog!
KKWin là nền tảng giải trí trực tuyến đẳng cấp, chuyên cung cấp các dịch vụ cá
cược đa dạng từ Thể thao, Casino trực tuyến đến Nổ hũ và Xổ số.
Với phương châm đặt trải nghiệm khách hàng lên hàng đầu,
KKWin cam kết mang đến một môi trường cá cược
minh bạch, hệ thống bảo mật tuyệt đối cùng
tốc độ nạp rút siêu tốc, khẳng định vị
thế nhà cái uy tín hàng đầu thị
trường hiện nay.
Бесплатно, быстро, без спама, калькуляторы суточной нормы минералов работают отлично.
https://drviet.com/read-blog/30060_vracha-na-dom.html
Здесь публикуются не только статьи врачей, но и полезные памятки для пациентов.
http://wiki.die-karte-bitte.de/index.php/Benutzer_Diskussion:FelipeSanto492
Друзья ситуация. Жесть случилась полная. Близкий не выходит из запоя. Соседи стучат в дверь. Скорая не едет. Короче, нормальные врачи нашлись — профессиональное выведение из запоя капельницей. Приехали через час. В общем, вся инфа вот здесь — прерывание запоев на дому https://vyvod-iz-zapoya-na-domu-samara-stu.ru Не тяните. Перешлите тому кому надо.
Слушайте что расскажу. Столкнулся с такой бедой. Брат пьёт без остановки. Жена в слезах. Скорая не едет. Короче, нормальные врачи нашлись — профессиональное выведение из запоя капельницей. Приехали через час. В общем, смотрите сами по ссылке — вывод из запоя частный врач https://vyvod-iz-zapoya-na-domu-samara-vwx.ru Не тяните. Скиньте другу в беде.
нарколог на дом Одинцово капельница от алкоголя на дому Москва
Thank you a lot for sharing this with all people
you actually realize what you’re talking about! Bookmarked.
Kindly also talk over with my web site =). We can have a hyperlink trade contract among us
Hey There. I found your blog using msn. This is a very smartly written article.
I’ll be sure to bookmark it and return to learn more of your useful information. Thanks for the post.
I will certainly comeback.
storage services dubai
Друзья ситуация. Попал я в переплёт конкретный. Муж просто пропадает. Жена в слезах. Платные клиники просят бешеные деньги. Короче, нормальные врачи нашлись — анонимный вывод из запоя без последствий. Отошёл за полчаса. В общем, жмите чтобы не потерять — анонимный вывод из запоя на дому https://vyvod-iz-zapoya-na-domu-samara-yza.ru Не надейтесь на авось. Перешлите тому кому надо.
Народ выручайте. Жесть случилась полная. Близкий не выходит из запоя. Жена в слезах. Платные клиники просят бешеные деньги. Короче, единственное что реально помогло — профессиональное выведение из запоя капельницей. Отошёл за полчаса. В общем, там контакты и прайс — выведение из запоя на дому анонимно https://vyvod-iz-zapoya-na-domu-samara-bcd.ru Не надейтесь на авось. Скиньте другу в беде.
Только лучшее здесь: https://remontpodomy.ru
Hello There. I found your blog the usage of msn. This is
an extremely well written article. I’ll make sure to bookmark it and come back to read more of your
helpful info. Thanks for the post. I’ll certainly return.
нарколог на дом Москва цены нарколог на дом в Москве
Качественный ремонт стиралок: ремонт и диагностика стиральных машин в воронеже. Выполняем в день обращения. Выезд бесплатно. Звоните, поможем вернуть технику к жизни!
Центр охраны труда https://www.unitalm.ru “Юнитал-М” проводит обучение по охране труда более чем по 350-ти программам, в том числе по электробезопасности и пожарной безопасности. А также оказывает услуги освидетельствования и испытаний оборудования и аутсорсинга охраны труда.
онлайн займ на карту микрозайм оформить
KKWin là nền tảng giải trí trực tuyến đẳng cấp, chuyên cung cấp các dịch vụ cá cược
đa dạng từ Thể thao, Casino trực tuyến đến Nổ
hũ và Xổ số. Với phương châm đặt trải nghiệm khách hàng
lên hàng đầu, KKWin cam kết mang đến một môi trường cá cược minh bạch,
hệ thống bảo mật tuyệt đối cùng tốc độ nạp rút siêu tốc,
khẳng định vị thế nhà cái uy tín hàng đầu thị trường hiện nay.
Друзья ситуация. Жесть случилась полная. Близкий не выходит из запоя. Дети не спят ночами. Платные клиники просят бешеные деньги. Короче, нормальные врачи нашлись — срочный вывод из запоя с капельницей. Поставили систему. В общем, смотрите сами по ссылке — вывод из запоя цены вывод из запоя цены Не тяните. Перешлите тому кому надо.
It’s actually a cool and helpful piece of info.
I’m happy that you shared this useful info with us.
Please keep us informed like this. Thank you for sharing.
кабель канал
кабель с резиновой изоляцией
Ищете проверенные дженерики для потенции от индийских фармацевтических заводов с отправкой в день заказа? На странице misterdick.ru можно сертифицированный дженерик купить, выбрав необходимую дозировку и количество таблеток. Выбирайте сиалис дженерики или дженерик виагра и спешите дженерики купить по самой привлекательной стоимости.
https://findaplaceph.com/author/kentonatencio8/
Выгодно дженерики купить в Москве с быстрой доставкой предлагает специализированный интернет-магазин misterdick.ru. В ассортименте представлены индийские сиалис дженерики и дженерик виагра высокого качества по доступным ценам. Оформите заказ, чтобы дженерик купить анонимно и получить надежные дженерики для потенции.
http://hirumah.com/author/fredericdzg813/
Надежный сайт misterdick.ru позволяет оригинальный дженерик купить без лишних переплат и с гарантией полной конфиденциальности. Здесь вы найдете лучшие дженерики для потенции, включая востребованная дженерик виагра и сиалис дженерики. Закажите проверенные индийские дженерики купить которые можно с оперативной доставкой в любой регион.
https://networking.dnake.ma/read-blog/24603_misterdick-ru.html
Всем привет из Екб. Муж просто исчез в бутылке. Дети ходят как в воду опущенные. Скорая даже не рассматривает такие вызовы. Короче, единственные кто помог без нервотрёпки — профессиональный вывод из запоя недорого. Человек очнулся и задышал ровно. В общем, сохраните в закладки обязательно — выезд на дом капельница от запоя выезд на дом капельница от запоя Не тяните время. Киньте ссылку тем, кто рядом с бедой.
Найти правильные инструкции по применению медикаментов – задача необходимая для каждого потребителя медицинской помощи
Всем здравствуйте. Брат не вылезает из штопора. Дети всего боятся. Платные врачи дерут космические деньги. В итоге, помогли только эти ребята — срочное выведение из запоя с препаратами. Человек ожил через пару часов. В общем, контакты и цены здесь — вывод из запоя цена вывод из запоя цена Каждый час без помощи — это риск. Кому-то это может спасти жизнь.
جرب الحظ الآن على 888starz casino للفوز بجوائز مثيرة ومباشرة.
888starz هو موقع ترفيهي يقدم مجموعة واسعة من الألعاب والخدمات.
الفقرة الثانية:
يوفر الفريق المختص دعمًا متواصلًا لمساعدة الأعضاء وحل المشاكل بكفاءة.
888stazr
تتميز المنصة بواجهة أنيقة وسهلة التصفح مما يسهل على الأعضاء الوصول إلى المحتوى.
القسم الثاني:
تعتمد المنصة سياسات صارمة لضمان نزاهة النتائج وحماية المستخدمين.
القسم الثالث:
تعتمد سياسة مكافآت مرنة تجذب اللاعبين وتكافئ نشاطهم على المنصة.
القسم الرابع:
تلتزم 888starz بالامتثال للقوانين واللوائح المعمول بها في الأسواق التي تعمل فيها.
Сроки зачисления и вывода определяются используемыми сервисами и соблюдением правил платформы.
888 старс скачать на андроид https://888-uz10.com/apk/
Игровая секция 888starz объединяет видеослоты, классические настольные игры и трансляции с живыми крупье.
Пользователям доступны несколько способов связи: мгновенный чат, письмо по электронной почте и информативный FAQ.
888starz app https://888-uz1.com/apk/
Поддержка клиентов доступна круглосуточно, помогая решать любые вопросы.
8888 starz https://888-uz2.com
It’s amazing to go to see this web page and reading the views
of all mates concerning this post, while I am also zealous of getting knowledge.
займ без процентов на карту https://zaym-nakartu.ru
Зеркало https://github.com/stake-ru-zerkalo помогает быстро открыть сайт, если основной адрес недоступен.
Операционная система GNU https://www.gnu.org свободная программная платформа с открытым исходным кодом, лежащая в основе многих современных дистрибутивов. Узнайте об истории проекта, компонентах системы, лицензии GNU GPL, возможностях и преимуществах свободного ПО
Доброго дня. Отец не выходит из штопора уже третьи сутки. Родственники места себе не находят. Скорая отказывается выезжать на такие вызовы. В итоге, единственные кто взялся без предоплат — анонимное выведение из запоя без учёта. Приехали в течение часа. В общем, жмите чтобы сохранить — вывод из запоя цена вывод из запоя цена Звоните сейчас. Отправьте тем кто в беде.
Preizkusil sem ze vse mogoce. Potem pa sem med brskanjem po spletu nasel nekaj, kar je mi dalo novo upanje. Govorim o zdravljenju alkoholizma pri Dr Vorobjevu. Veste, alkoholizem je bolezen. In ljudje se sramujejo prositi za pomoc. Zato vam zelim pokazati vse tehnicne podrobnosti in uradne informacije, ki so na voljo na tej povezavi: odvisnost od alkohol odvisnost od alkohol. Tam boste nasli vse potrebne informacije.
Po dolgih letih sem koncno nasel resitev. Pot je bila naporna, ampak zdaj sem ponosen nase. Ce kogarkoli, ki ga imate radi se sooca s to tezavo – najboljsa odlocitev je poklicati. Drzim pesti za vsakega, ki se bori
Pozdrav iz moje izkusnje. Moram povedati svojo zgodbo. Bil sem na robu, iskreno povedano. Potem pa sem po priporocilu prijatelja nasel ambulantno zdravljenje alkoholizma pri metodi, ki resnicno deluje. Nisem verjel, da bo delovalo. Ampak sem vseeno poskusil. In zdaj, ko gledam nazaj, lahko recem, da je bilo to prelomnica v mojem zivljenju. Vse uradne informacije in podrobnosti sem preveril na spletni strani, posodobljene podatke pa si lahko ogledate tukaj: alkoholizem alkoholizem. Ni lahko priznati, ampak se splaca.
Ce iscete resitev za to tezavo — vzemite si cas in raziscite. Srecno vsem!
Все самое свежее здесь: https://spainslov.ru/site/word/word/%D0%98%D0%A1%D0%A1%D0%92%D0%95%D0%A0%D0%9B%D0%98%D0%92%D0%90%D0%A2%D0%AC
Актуальные события https://sin180.ru в мире и России: последние новости политики, экономики, общества, технологий, спорта и культуры. Следите за важными событиями, аналитикой, официальными заявлениями, репортажами и обновлениями в режиме реального времени.
Медицинский портал https://registratura24.com с полезной информацией о заболеваниях, симптомах, диагностике, лечении и профилактике. Статьи врачей, справочник лекарств, советы по здоровью, медицинские новости и материалы для пациентов.
Все о ремонте https://stroymaster-base.ru и строительстве дома в одном месте. Руководства по возведению фундамента, кровли, отделке, инженерным системам, выбору материалов, инструментов и современным технологиям строительства для частных домов.
Блог интересных новостей https://uploadpic.ru о событиях в мире, науке, технологиях, культуре, истории и необычных открытиях. Читайте свежие публикации, удивительные факты, аналитические материалы и самые обсуждаемые темы со всего мира.
Мировые новости https://trawa-moscow.ru в режиме реального времени: политика, экономика, технологии, наука, спорт и культура. Следите за главными событиями дня, международной аналитикой, эксклюзивными материалами и важными изменениями по всему миру.
Здарова, народ. Беда пришла. Соседи уже начали звонить в участок. В диспансер сдавать — ужас. Итог, только эти врачи смогли помочь — профессиональная помощь на дому. Бригада подъехала через 35 минут. В общем, запишите себе — вывод из запоя на дому в екатеринбурге вывод из запоя на дому в екатеринбурге Промедление может стоить здоровья. Вдруг это спасёт кого-то.
Все про сад https://tepli4ka.com огород и приусадебный участок: выращивание овощей, фруктов и цветов, уход за растениями, борьба с вредителями, сезонные работы, полезные советы, современные агротехнологии и идеи для благоустройства участка.
Vavada onlayn kazinosunda uduşları bank kartına cəmi bir neçə dəqiqəyə çıxardım.
http://prithviproperties.in/author/kelleymonson6/
Vavada casino turnirlərində mükafat fondu çox yüksək olur.
https://sikeyglobal.com/author/ariannebair70/
Vavada onlayn kazinosu məni ödəniş müddəti ilə heç vaxt məyus etməyib.
https://millhive.co.uk/irvinbatista96
Velg et topprangert Norsk Casino med raske uttak via Trustly og BankID. Vår uavhengige guide hjelper deg å finne casinoer med lave omsetningskrav og skattefrie gevinster innenfor EØS. Start spillingen på en sikker og mobilvennlig plattform i dag.
https://git.aiximiao.com/robbiegariepy
Kazinonun VIP proqramı çərçivəsində statuslar artdıqca imtiyazlar çoxalır.
https://fanstube.ru//@marilynnbisdee?page=about
Ser du etter et trygt Norsk Casino i 2026? Vi tester nettcasinoer med ekte penger for å gi deg ærlige vurderinger av bonuser, utbetalingstid og lisenser. Finn de beste og mest pålitelige casinotilbudene for norske spillere her.
https://megamasjid.net/author/jennie24426255/
Ser du etter oppdaterte fakta om Norsk Casino lisenser og skatteregler? Vi leverer objektive tester av casinoer uten norsk lisens, basert på reelle innskudd og uttak. Finn en stabil plattform med døgnåpen kundeservice og sikre betalinger.
https://git.95669.com/refugiafaith99
Vavada kazino saytında qeydiyyat çox sürətlidir, dərhal oynamağa başladım.
https://kopropertyrentals.com/author/rachellepatton/
Velg et topprangert Norsk Casino med raske uttak via Trustly og BankID. Vår uavhengige guide hjelper deg å finne casinoer med lave omsetningskrav og skattefrie gevinster innenfor EØS. Start spillingen på en sikker og mobilvennlig plattform i dag.
https://play.talkdrove.cc.nf/@kourtneybrisen?page=about
Ser du etter oppdaterte fakta om Norsk Casino lisenser og skatteregler? Vi leverer objektive tester av casinoer uten norsk lisens, basert på reelle innskudd og uttak. Finn en stabil plattform med døgnåpen kundeservice og sikre betalinger.
https://gitea.viviman.top/augustinabutto
Вау, этот мод просто супер, мой друг тоже искал такие вещи, поэтому я
обязательно скажу ему про игры со взломом на андроид
The steps to do so are the same for both YouTube Premium and non-Premium users.
Все про ремонт https://geekometr.ru полезные советы, пошаговые руководства и идеи для обновления квартиры или дома. Статьи о ремонте стен, пола, потолка, ванной, кухни, выборе материалов, инструментов и современных технологиях отделки.
I always prefer to compare a few casino sites before making a decision. You should not play with money needed for daily expenses!
Check out my blog post … https://funkyjackpotcasino.me.uk/
This is my first time pay a visit at here and i am genuinely pleassant to read
everthing at single place.
تم تصميم الموقع ليدعم اللغة العربية بالكامل مع واجهة سهلة تناسب المستخدمين في مصر.
يحتوي الموقع الرسمي على ما يزيد عن خمسة آلاف لعبة كازينو وسلوت من مطورين موثوقين.
تتوفر احتمالات قوية ورهان مباشر مع متابعة فورية للنتائج والإحصائيات.
888starz https://bbhscanners.com/
يمنح الموقع الرسمي 888starz اللاعبين الجدد في مصر باقة ترحيبية تصل إلى 1500 يورو مع 150 لفة مجانية.
يعمل الدعم الفني على مدار الساعة باللغتين العربية والإنجليزية عبر الدردشة والبريد والهاتف.
1 Suchen Sie nach echtem Nervenkitzel, bietet https://holz-pferd.de/ erstklassige Spielautomaten und Live-Spiele direkt über holz-pferd.de. Profitieren Sie von schnellen Auszahlungen und exklusiven Bonusaktionen für Neukunden. Registrieren Sie sich jetzt und sichern Sie sich Ihr Startguthaben.
Everything for Minecraft topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Voor je een account aanmaakt op een casino platform, is het slim om de belangrijkste details te controleren. Rustig vergelijken kan later problemen voorkomen!
Also visit my web page; https://cashpoint24.net/
Sayt to’liq o’zbek tilida ishlaydi va sodda, tez interfeys bilan foydalanishga qulay.
888starz uz https://oerknal.org/
888starz TV o’yinlari va Aviator kabi crash-o’yinlarni yagona bo’limda birlashtiradi.
Sport bo’limi futbol, basketbol, tennis, kriket, xokkey va kibersport kabi turlarga tikish imkonini beradi.
888starz birinchi to’ldirish uchun 100% bonus taklif etadi, umumiy summa 1500 evrogacha va 150 FS bilan.
Yangi hisob telefon yoki email orqali tez va sodda tarzda ochiladi.
888starz yuklab olish 888starz yuklab olish
Platforma smartfonlarga to’liq moslashgan va alohida mobil ilovaga ega.
Eksklyuziv 888Games va jonli dilerli stollar o’yinchiga haqiqiy kazino muhitini taqdim etadi.
Rasmiy saytda kriketdan xokkeygacha keng sport liniyasi mavjud.
Yangi o’yinchilar 1500 evrogacha xush kelibsiz bonusi va 150 FS ga ega bo’lishadi.
888starz sutkalik texnik yordamni jonli chat orqali ta’minlaydi.
Здорова, народ. Близкий человек уже 5 дней в запое. Соседи уже стучат в дверь. Скорая помощь просто разводит руками. В итоге, реально крутые специалисты — помощь нарколога на дом. Врач сразу поставил систему. В общем, не потеряйте, пригодится — нарколог на дом вывод из запоя на дому нарколог на дом вывод из запоя на дому Каждый час усугубляет состояние. Отправьте тем, кто рядом с бедой.
Здорова, ребята. Отец снова сорвался в пьянку. Соседи уже начали звонить в полицию. В бесплатную наркологию — страшно идти. Короче, спасла только эта капельница — прокапаться от алкоголя недорого. Врач сразу начал детокс. В общем, не потеряйте — капельница после запоя https://kapelnica-ot-zapoya-nizhnij-novgorod-icy.ru Не ждите чуда. Киньте ссылку тем, кто в беде.
Привет из Екатеринбурга. Муж пьёт без остановки. Родственники не знают куда бежать. В диспансер отвозить — позор на район. Короче, единственные кто приехал без предоплаты — недорогой вывод из запоя в Екатеринбурге. Через час человек начал говорить. В общем, жмите, чтобы не потерять — вывод из запоя капельница екатеринбург https://vyvod-iz-zapoya-na-domu-ekaterinburg-dyz.ru Не откладывайте. Киньте ссылку нуждающимся.
Appreciate this post. Let me try it out.
Reels casino online
Всем привет из НН. Беда пришла. Жена на грани срыва. В диспансер тащить — клеймо на всю жизнь. Короче, реально профессиональные врачи — вывод из запоя на дому срочно. Сняли абстинентный синдром. В общем, вся инфа и контакты по ссылке — вывод из запоя дешево нижний новгород https://vyvod-iz-zapoya-na-domu-nizhnij-novgorod-pwj.ru Промедление может стоить здоровья. Киньте ссылку нуждающимся.
Die mobile Version ermöglicht die Abgabe von überall.
https://arboristexperten.se/author-profile/merrimcalister/
Das ist erlaubt, aber die Quittung gilt als Inhaberpapier.
https://ybcard.digiopera.com/thomas42798057
Bezoek Betsixty Casino voor een unieke speelervaring met live roulette, blackjack en innovatieve crash games. Met flexibele limieten en een overzichtelijk platform vind je hier altijd entertainment. Claim nu je bonus en win.
Also visit my blog: https://2dehandsstudieboek.nl/
For anyone who knows the feeling of wanting a better haircut but not knowing how to describe it, this platform offers a more precise path. With one photo and a brief quiz, the system studies your features, hair characteristics, and daily context, then delivers 10 matched cuts together with a detailed barber guide. Behind the result is not a simple filter, but a mathematical model with more than 50 parameters and precise 3D head modeling, designed to show why a style works for you. Instead of relying on a quick visual guess, the platform combines 50+ signals with facial geometry analysis to show the logic behind the recommendation. The output is built for realism: high-fidelity previews that make the options easy to judge. In addition, you get a clear haircut plan with practical parameters and stylist instructions, which helps turn the visual concept into an actual salon result. The workflow stays lightweight: upload one selfie, wait roughly 30 seconds, and review the outcome without creating an account first. For people who have long worn a cut that does not really suit them, or for anyone who prefers a practical, data-backed style decision, this approach offers both clarity and confidence. https://hairstyleai.space/
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Casino Bonanza ödeme yöntemleri arasında kripto olması büyük bir artı.
https://gitlab.liruwei.cn/carmellawhiteh/carmella1986/wiki/Casino-Bonanza
Reels casino online
Casino Bonanza oyunları lisanslı ve RNG sertifikalı olduğu için güven veriyor.
https://touristik.services/author/jeseniablanch2/
Reels казино вход
Здорова, народ. Ситуация критическая. Врачи на дом — временное решение. Государственная наркология — страшно и стыдно. Короче, единственное, что реально сработало — анонимный вывод из запоя в стационаре. Выписали без симптомов ломки. В общем, телефон и цены тут — прокапаться в стационаре https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-knd.ru Не надейтесь, что само пройдёт. Это может спасти чью-то семью.
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Легко ли быть наблюдателем, когда вокруг творится зло и нельзя вмешаться, навести порядок, защитить? Главный герой этого романа – дон Румата (землянин Антон), который попадает на планету Арканар с экспериментальным миром. На этой планете царит средневековая жестокость, фальшь и борьба за власть. Но Румата не должен вмешиваться. Он ученый, который проводит эксперимент. Однако человек в нем берет вверх над ученым, сердце побеждает рассудок. Разве можно спокойно наблюдать, как зло побеждает добро, как талант растаптывается, а справедливости не существует? Главному герою это не удается…
https://knigavuhe.org/book/84-strugackie-arkadijj-i-boris-trudno-byt-bogom/
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Thank you for every other informative website. The place else may
just I am getting that type of information written in such
a perfect means? I’ve a challenge that I am simply now operating on, and I’ve
been on the glance out for such info.
Everything for Minecraft https://topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Cabinet IQ
8305 Ѕtate Hwyy 71 #110, Austin,
TX 78735, United Ꮪtates
254-275-5536
Virtualremodel (https://atavi.com/share/xwtctnz1mhcsg)
Bei der Online-Teilnahme erfolgt das komplett automatisch.
https://code.cif.su/stanton28a0559
Achten Sie auf das offizielle Logo im Schaufenster.
https://wisestudio.ru/@mirandasachse7?page=about
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Доброго дня, земляки. Беда пришла в семью. Мать плачет. Платная клиника — деньги выкачивают. Короче, спасла только эта бригада — недорогой вывод из запоя в Санкт-Петербурге. Приехали через 35 минут. В общем, контакты и цены тут — нарколог вывод из запоя нарколог вывод из запоя Не ждите. Перешлите тем, кто рядом с бедой.
Привет из Нижнего. Близкий человек сорвался в запой. Мать рыдает. Скорая не считает это проблемой. Итог, выручила только эта клиника — частная наркологическая помощь анонимно. К вечеру состояние нормализовалось. В общем, не потеряйте — помощь наркологическая помощь наркологическая Звоните прямо сейчас. Отправьте тем, кто рядом с бедой.
Very nice post. I just stumbled upon your blog and wished to say that
I’ve truly enjoyed surfing around your blog posts.
In any case I’ll be subscribing to your rss feed and I hope you write again soon!
my web page :: essential medicinal products
Доброго времени суток. Мой отец уже четвёртые сутки в запое. Дети боятся заходить в комнату. В государственную наркологию — страшно и стыдно. Короче, единственные, кто быстро приехал — недорогой вывод из запоя в Санкт-Петербурге. Приехали через 30 минут. В общем, вся инфа и контакты по ссылке — вывод из запоя в домашних условиях нарколог 24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-abc.ru Не ждите чуда. Киньте ссылку тем, кто в беде.
Доброго вечера, земляки. Брат снова ушёл в пьянку. Родные просто в отчаянии. В государственный диспансер — табу. В итоге, реально крутые специалисты — вывод из запоя на дому круглосуточно. Сняли острую интоксикацию. В общем, жмите, чтобы сохранить — круглосуточный вывод из запоя круглосуточный вывод из запоя Звоните прямо сейчас. Перешлите тем, кто рядом с бедой.
Доброго времени, земляки. Близкий человек уже пятые сутки в запое. Дети боятся оставаться с отцом. Скорая не реагирует на такие вызовы. Короче, единственные, кто приехал быстро — вывод из запоя цены адекватные. Приехали за 30 минут. В общем, не потеряйте — вывод из запоя недорого вывод из запоя недорого Не ждите чуда. Перешлите тем, кто рядом с бедой.
Everything for Minecraft topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Εverything іѕ verʏ open witһ a precise description οf thе issues.
Іt wаs definitely informative. Ⲩour website is veгy uѕeful.
Thɑnks fоr sharing!
mү site … business consulting (https://mbocentre.com/)
سلام، بنده اخیرا در حال جستجو آنلاین به این صفحه برخوردم و بدون اغراق برام جالب
بود. نوشتههاش بهدردبخور بود و کمتر همچین منبعی پیدا کنم.
فکر کنم برای افراد مختلفارزش دیدن داره.
اگر به دنبال منبع معتبر هستن بد نیست برن ببینن.
در کل تجربه خوبی بودو قطعا بازدیدش میکنم
در پایان کار
برای اون دسته علاقهمندها
فعالیتهای شرطی
میخوان شروع کنن
این مرجع قابل توجه
میتونه
کاربردی باشه
نکته قابل توجهاینه که
سایتهایی مثل
enfejaronline.net
و
sib-bet
حضور پررنگی دارن
در کل
ارزشمند بود
و
احتمالاً
مراجعه مجدد دارم
.
Herе iis my wweƄ page; چالشها و نکات مهم در استفاده از سایت الف
بت; http://sibbetreview.com/alefbet-review/,
Все для Minecraft https://www.minecraft-files.ru в одном месте: моды, скины, карты, текстуры и полезные загрузки для Java и Bedrock Edition. Находите лучшие дополнения, следите за обновлениями, используйте подробные гайды и безопасно скачивайте игровой контент.
Everything for Minecraft http://www.topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Trusted store NPPRTeamShop order bulk hotmail accounts for affiliate account creation maintains the widest catalog of ad-ready accounts for scaling campaigns without downtime. NPPR TEAM SHOP maintains multi-tier catalog navigation by platform, geo, account type, and price so buyers find the right SKU fast. Whether you need accounts for testing or production campaigns, the catalog covers every tier from entry-level to premium.
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Заказывали комплексный электромонтаж в новостройке, розетки стоят идеально ровно.
https://theindiemusic.com/author-profile/delilallanos74/
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Здорова, Питер. Отец не выходит из штопора. Дети боятся оставаться дома. В бесплатный диспансер — стыд на всю жизнь. Короче, единственные, кто приехал без лишних вопросов — вывод из запоя на дому срочно. К утру человек пришёл в сознание. В общем, не потеряйте — помощь вывода запоя помощь вывода запоя Не тяните время. Киньте ссылку нуждающимся.
Толковый электрик Минск, помог перебрать распределительный щит после застройщика.
https://git.thunder-data.cn/stephany38o46
Hey everyone, I actually wanted to mention a thing I randomly came across as scrolling online gaming blogs. After another late ranked match streak, I ended up reading a pretty interesting article about some new online casino that apparently has some kind of international operating license.
I obviously not posting this to promote gambling, but from the perspective of a gamer, I found the idea curious. The biggest thing that grabbed my attention was that the writer described the platform as available for many regions. Of course, the wording does never mean that all users can register from every region. National regulations still matter, and people should confirm their local restrictions before trying it.
Still, the idea sounded pretty serious. The article said that the casino was made for players from various locations, with support that seem more accessible than traditional casino sites. It talked about quick account creation, clean navigation, smartphone support, and multiple deposit methods.
As a online player, I always look at the design first. When a site is clunky, I usually lose interest basically instantly. The article made the casino sound responsive, which is not a small thing because nowadays players are used to smooth launchers. A outdated interface can kill even a promising service.
The licensing part was also the main reason I kept reading. There are countless sketchy casino sites everywhere, and many of them throw around loud ads without proving much. So when an article focuses on international licensing, that at least makes me pay more attention. But again, personally I would still confirm the license number myself before trusting anything.
The article also talked about entertainment variety. It sounded like the site has classic slots, card games, and streamed casino games. I know table games are not the same from normal gaming, but there is still some shared design language in how sites try to keep people engaged. Things like animations, daily bonuses, and smooth feedback loops are everywhere in both gaming.
One thing I respected in the article was that it apparently bring up controlled gambling. Responsible play is serious, because real money are involved. Gaming should stay controlled, not become something unhealthy. The article referred to things like budget controls, pause features, and safety settings. In my opinion, any licensed casino platform should provide those options by default.
Another notable part was the global audience. The article made it sound like the casino is not simply focused on a single market, but on several countries. That sounds useful, especially for people who play from different places, but it also means everyone need to be smart. Global does never automatically mean legal everywhere. There are usually limited locations, and those lists should be reviewed before depositing.
I also thought about how online casinos are becoming more like game launchers. They focus on speed, menus, and smooth use. For older casino websites, the experience sometimes felt dated. But newer ones seem to understand that gamers expect clean design. Good UX does not make a casino automatically safe, but it does show that the platform is at least thinking about user experience.
The money side also sounded somewhat relevant. The article mentioned that the platform supports various cashier options, which matters for cross-border users. But that is another area where people should verify the fees. Payment rules are very important, because a site can look great, but if withdrawals are limited, then the experience becomes annoying.
To be clear, I am not trying to say this platform is the best. I just found the article noticeable because it shows how the casino gaming industry is moving. More platforms are trying to look modern, and more of them are using app-like design. For people who follow online entertainment, that is pretty interesting to watch.
Have anyone else here found similar posts about modern online casinos? Do you think licensed gambling platforms actually makes a big difference, or do you mostly care about reputation? I am honestly curious from the UX perspective, not trying to push anyone. And, of course, if someone decides to join any casino site, they should verify local laws, read the terms, protect their budget, and behave responsibly.
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Everything for Minecraft topminecraftworldseeds com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Здорова, народ. Беда случилась. Соседи уже стучат в стену. В бесплатный диспансер — страшно. Короче, реально профессиональные врачи — вывод из запоя цены доступные. Врач поставил систему. В общем, не потеряйте — врач капельница алкоголь на дом врач капельница алкоголь на дом Звоните прямо сейчас. Вдруг это спасёт чью-то жизнь.
Experienced supplier NPPR TEAM SHOP https://npprteamshop.com/en/facebook/facebook-accounts-for-advertising/ offers complete asset packages including credentials, 2FA codes, cookies, and user-agent data. NPPR TEAM SHOP maintains multi-tier catalog navigation by platform, geo, account type, and price so buyers find the right SKU fast. Experienced buyers return for the consistency — same quality standards, same fast delivery, same professional support every time.
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Всем привет из культурной столицы. Отец не выходит из штопора. Дети напуганы до смерти. Скорая отказывается приезжать. Короче, единственные, кто взялся за дело — недорогой вывод из запоя в Санкт-Петербурге. К утру человек пришёл в себя. В общем, цены и телефон тут — вывод из запоя недорого нарколог24 https://vyvod-iz-zapoya-na-domu-sankt-peterburg-vkx.ru Не ждите. Вдруг это спасёт чью-то жизнь.
Everything for Minecraft topminecraftworldseeds com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории
благодаря сочетанию ключевых
факторов. Во-первых, это широкий и разнообразный ассортимент, представленный сотнями
продавцов. Во-вторых, интуитивно
понятный интерфейс KRAKEN, который упрощает навигацию, поиск товаров и управление заказами
даже для новых пользователей. В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования
условного депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с
внимательным отношением к безопасности клиентов, что делает процесс покупок более предсказуемым, защищенным и,
как следствие, популярным среди пользователей, ценящих анонимность и
надежность.
Надежный сервис бытовой техники: мастер по ремонту стиральных машин волгоград. Выполняем в день обращения. Оригинальные запчасти. Звоните, поможем вернуть технику к жизни!
Подробно расписано, как получить 1xbet регистрация бонус, все шаги понятны.
My web site; https://code.yun.ink/lonniedespeiss/8859430/wiki/1xbet
Официальный https://shubhlisting.com/author/xiomarabromley/ помог подняться на лайв ставках с нуля.
I am extremely impressed with your writing skills as well as with the
layout on your weblog. Is this a paid theme or
did you modify it yourself? Anyway keep up the nice quality writing, it is rare to see
a great blog like this one these days.
Регистрация прошла быстро, ввел промокод при регистрации 1xBet и получил фрибет.
Feel free to visit my page :: https://hiwinpro-investor.com/clevelandl
Рабочий промокод 1xbet сработал с первого раза, увеличил свой первый депозит в два раза.
Feel free to surf to my webpage … https://slowdating.ca/@kelseykirwan3
Хочешь сайт на тильде? https://sozdaniestranic.ru лендинги, сайты услуг, интернет-магазины, корпоративные проекты и портфолио с адаптивным дизайном, SEO-подготовкой, интеграциями и удобной системой управления контентом.
Официальный 1хбет бонус при регистрации помог подняться на лайв ставках с нуля.
My blog: https://northdataai.com/amadomaselli64
Everything for Minecraft topminecraftworldseeds com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Всем салют из Питера. Мой брат уже неделю в запое. Родные не знают, как быть. Платная клиника — выкачивает деньги. Итог, выручила эта служба — вывод из запоя на дому круглосуточно. Прибыли через 30 минут. В общем, сохраните себе — вывод из запоя на дому спб цены https://vyvod-iz-zapoya-na-domu-sankt-peterburg-rpl.ru Каждый час на счету. Перешлите тем, кто в беде.
Салют, Питер. Мой знакомый уже седьмой день в запое. Соседи стучат в стену. В наркологию тащить — стыд и страх. Короче, единственные, кто приехал без предоплат — выведение из запоя на дому анонимно. Врач поставил капельницу. В общем, вся инфа по ссылке — капельница от алкоголя на дому спб https://vyvod-iz-zapoya-na-domu-sankt-peterburg-msy.ru Звоните прямо сейчас. Вдруг это спасёт чью-то жизнь.
Жіночий журнал https://womandb.com про красу, моду, здоров’я, стосунки, сім’ю та стиль життя. Читайте корисні поради, актуальні тренди, рецепти, психологію, догляд за собою та цікаві статті для сучасних жінок.
Последние одесские новости https://dverikupe.od.ua и происшествия за сегодня: оперативная информация о событиях в Одессе и области, ДТП, происшествиях, работе городских служб, политике, экономике, обществе, погоде и других важных новостях дня.
Everything for Minecraft http://www.topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
سلام، بنده چند وقت پیش به صورت کاملا
تصادفی آنلاین به این صفحه آشنا شدم و بدون اغراق خیلی خوشم اومد.
نوشتههاش جذاب بود و به ندرت همچین منبعی پیدا کنم.
به نظرم برای خیلیها کاربردی باشه.
اگه دنبال یه سایت خوب هستن بد
نیست برن ببینن. به طور کلی راضیکننده
بود و احتمالا بازدیدش میکنم
بطور خلاصه
برای کاربرایی که در جستجو هستن
بازیهای کازینویی
فعال هستن
این سایت خوب
میتونه مناسب باشه
مناسب باشه
جالبه که
مجموعههایی مثل
enfejaronline قوی
و
siƅbet آنلاین
شناخته شده هستن
در نهایت
ارزش وقت گذاشتن داشت
و
باز هم حتما
دوباره استفاده میکنم
.
My website – تحلیل الگو های شرطبندی: معتبرترین منبع اطلاعات
Повышение квалификации https://kursdpo.ru и переподготовка для работников образования с учетом актуальных требований. Курсы для учителей, воспитателей, преподавателей, психологов, логопедов и руководителей образовательных учреждений в удобном формате обучения.
Wenn ich Casino-Plattformen vergleiche, schaue ich nicht nur auf das Design; Regeln, Boni und Auszahlungen sind wichtiger. Glücksspiel sollte Unterhaltung bleiben, keine Möglichkeit zum Geldverdienen.
Feel free to surf to my blog; https://spinfests.com/
Everything for Minecraft https://topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Профессиональное изготовление печатей, штампов и факсимиле подписи по готовым макетам и текстовым реквизитам. Применяем метод лазерной гравировки на резине для достижения максимальной четкости оттиска и защиты документов от подделки. Срочный заказ штемпелей с отправкой в день обращения.
https://oasisrealestateeg.com/author/jamemeeks77050/
Быстрое изготовление печатей по оттиску без лишних документов и задержек в Санкт-Петербурге. Восстановим точную копию изношенного штампа, сделаем факсимиле руководителя или новые печати для документов за пару часов. Используем импортные комплектующие.
https://www.blacksewingnetwork.com/author-profile/francisco32a16/
Antes de criar uma conta em qualquer plataforma de cassino, vale conferir os detalhes importantes! A primeira impressão não é suficiente!
My website: https://888wins.br.com/
Cool blog! Is your theme custom made or did you download it from
somewhere? A design like yours with a few simple adjustements would really make
my blog jump out. Please let me know where you got your design. With
thanks
Приветствую. Мой брат уже шестой день в запое. Мать плачет. Скорая не приедет на такой вызов. Короче, реально крутые врачи — вывод из запоя цены доступные. Сняли интоксикацию. В общем, жмите, чтобы сохранить — выведение из запоя в спб https://vyvod-iz-zapoya-na-domu-sankt-peterburg-qbf.ru Звоните прямо сейчас. Вдруг это спасёт чью-то жизнь.
Kiedy porównuję platformy casino, nie patrzę tylko na wygląd; ważniejsze są zasady, bonusy i wypłaty! Porównanie kilku platform przed wyborem ma dużo sensu!
Here is my webpage; https://funid.pl/
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной
аудитории благодаря сочетанию ключевых
факторов. Во-первых, это широкий и
разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN,
который упрощает навигацию, поиск товаров и управление заказами даже для новых пользователей.
В-третьих, продуманная система безопасных транзакций, включающая механизмы разрешения споров (диспутов) и возможность использования условного депонирования,
что минимизирует риски для обеих сторон
сделки. На KRAKEN функциональность сочетается с внимательным отношением к безопасности клиентов, что делает процесс покупок
более предсказуемым, защищенным и, как следствие,
популярным среди пользователей, ценящих
анонимность и надежность.
Bevor ich ein Online-Casino in der Schweiz nutze, prüfe ich zuerst Bedingungen, Zahlungen und Limits! Glücksspiel sollte Unterhaltung bleiben, keine Möglichkeit zum Geldverdienen!
Here is my web site https://sevenplaych.ch/
Настоящие отзывы пользователей помогают обойти стороной недобросовестных посредников.
https://git.dinsor.co.th/harriettkable3
Very great post. I simply stumbled upon your weblog and wished to say that
I have truly loved browsing your weblog posts.
After all I’ll be subscribing on your feed and I’m hoping you write once more
soon!
Банкротство юридического лица — законный способ урегулировать долги и прекратить деятельность компании при невозможности исполнения обязательств. Переходите по запросу от какой суммы можно подать на банкротство юридического лица. Поможем провести процедуру банкротства под ключ: от анализа ситуации и подготовки документов до сопровождения на всех этапах процесса. Защитим интересы бизнеса, минимизируем риски для руководителей и учредителей. Получите профессиональную консультацию уже сегодня.
Нельзя не отметить, что рад(а), что нашёл(а) сайт .
http://www.bisound.com/forum/showthread.php?p=3286342
Останні новини Києва https://xxl.kyiv.ua головні події столиці, оперативні повідомлення, міські новини, ДТП, надзвичайні ситуації, політика, економіка, культура, спорт і життя міста. Слідкуйте за актуальною інформацією та важливими подіями щодня.
I loved as much as you’ll receive carried out
right here. The sketch is attractive, your authored subject matter stylish.
nonetheless, you command get bought an edginess over that you
wish be delivering the following. unwell unquestionably come further formerly again since
exactly the same nearly very often inside case you shield this increase.
Everything for Minecraft https://topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Психолог онлайн — это невероятно удобный формат для занятых.
https://www.job-k.com/employer/psychologistdarya
Психолог Дарья Антонова вернула мне веру в себя и свои силы.
https://truesecret.org/@gerij039841304?page=about
psychologistdarya.online помог мне справиться с паническими атаками.
https://git.cukak.com/leahess7221529
Все про діабет https://pro-diabet.in.ua симптоми, причини, діагностика, лікування та профілактика. Корисні статті про цукровий діабет 1 і 2 типу, контроль рівня глюкози, харчування, спосіб життя та сучасні методи терапії.
Admiring the time and energy you put into your site and detailed information you present.
It’s great to come across a blog every once in a
while that isn’t the same unwanted rehashed information. Fantastic read!
I’ve saved your site and I’m including your RSS feeds to my
Google account.
Доброго вечера. Брат снова ушёл в завязку. Мать на грани срыва. Платная клиника — грабёж. Итог, спасла эта служба — выведение из запоя на дому анонимно. Через пару часов человек пришёл в норму. В общем, вся инфа по ссылке — вывод из запоя на дому вывод из запоя на дому Каждый час на счету. Вдруг пригодится.
This specialized 1xbet sports promo code 1X200ART is tailored for major international tournaments and local matches.
my web blog https://gitlab.innive.com/madieeiffel896/2555103/-/issues/1
The high-reward 1xbet casino promo code grants additional funds for live dealer games and popular slot machines.
Here is my page; https://thehrguardians.com/employer/bet-promo-codes/
Здорово, народ Близкий человек совсем потерял контроль Мать рыдает Никакие таблетки не помогают Короче, единственное что реально помогло — лечение запоя в стационаре полный курс Врачи наблюдали 24/7 В общем, вся инфа по ссылке — стационарное выведение из запоя стационарное выведение из запоя Стационар — это реальный выход Перешлите тем кто в такой же ситуации
Enter the 1xbet promo code 1X200ART during registration to instantly unlock your 1xbet welcome bonus 2026.
Here is my web-site :: http://git.aivfo.com:36000/jorjaallcot31
Лучшие психологи Краснодара не сравнятся с ее подходом.
https://git.archieri.fr/audraglynde207
The 1xbet promo code bonus features transparent rules requiring a 5x wagering fulfillment in accumulator bets.
Also visit my blog: http://vmcmgmt.com/agents/partheniaburch/
Register using the 1xbet promo code casino to experience premium table games with extra starting credits.
Also visit my web blog https://findworkspace.in/author/lashunda466468/
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Доброго вечера Тошнит, трясёт, сил нет Рассол уже не лезет Короче, врачи приехали и поставили систему — капельница от похмелья клиника на дому Через час состояние нормализовалось В общем, вся инфа по ссылке — капельница от запоя недорого капельница от запоя недорого Капельница — это быстро и эффективно Перешлите тем кто в такой же ситуации
888starz sayti ellikdan ziyod tilda ishlaydi va sodda dizayni bilan har qanday foydalanuvchiga mos keladi.
Jonli kazinoda real dilerlar bilan 250 dan ortiq stol — ruletka, blekjek va bakara — sutka davomida ochiq.
Foydalanuvchilar jahon chempionatlari va mahalliy ligalarga stavka qo’yishlari mumkin.
Bundan tashqari saytda keshbek, freebet va muntazam turnirlar o’tkaziladi.
Texnik yordam kun bo’yi jonli chat orqali javob beradi, mobil ilova Android va iOS-da yuklab olinadi.
888 starz casino 888 starz casino.
Приветствую Ситуация критическая Дети напуганы Нужна профессиональная помощь Короче, только стационар реально спас — вывод из запоя в стационаре круглосуточно Врачи наблюдали 24/7 В общем, вся инфа по ссылке — капельница от запоя в стационаре https://vyvod-iz-zapoya-v-staczionare-nizhnij-novgorod-jkp.ru Не ждите пока станет хуже Перешлите тем кто в такой же ситуации
يقدم الموقع تصميمًا عربيًا واضحًا وقائمة تدعم أكثر من خمسين لغة.
يوفر قسم الكازينو أكثر من 4000 لعبة سلوت من كبرى شركات التطوير.
يغطي الموقع أكثر من 35 فئة رياضية تشمل أبرز الأحداث العالمية والمحلية.
يمنح الكازينو اللاعبين الجدد مكافأة ترحيب حتى 1500 يورو مع 150 لفة مجانية.
يمكن فتح حساب جديد عبر الهاتف أو البريد الإلكتروني في دقائق.
starz 888 888starz
888stars 888starz
يتيح 888starz للمستخدم المصري الوصول إلى آلاف الألعاب وعشرات الرياضات من حساب واحد.
يقدم 888starz سلسلة 888Games الخاصة بتجارب سريعة ونتائج لحظية.
يمنح الرهان المباشر تحديثًا لحظيًا للأودز مع متابعة حية للمباريات.
تتوالى المكافآت الدورية بين الاسترداد النقدي والترقيات الموسمية.
لا يتطلب فتح الحساب سوى دقائق معدودة على الموقع الرسمي.
Салют, земляки. Близкий человек снова сорвался. Дети испуганы. Скорая не приедет на такой вызов. Короче, спасла эта бригада — вывести из запоя на дому срочно. Сняли интоксикацию. В общем, не потеряйте — нарколог на дом вывод из запоя на дому нарколог на дом вывод из запоя на дому Звоните прямо сейчас. Вдруг это спасёт чью-то жизнь.
Доброго дня А на работу через пару часов Рассол уже не лезет Короче, нашел реально работающий способ — капельница от похмелья цена доступная Приехали через 30 минут В общем, не потеряйте контакты — капельница от запоя вызов капельница от запоя вызов Капельница — это быстро и эффективно Перешлите тем кто в такой же ситуации
Everything is very open with a clear description of the issues.
It was definitely informative. Your website is very helpful.
Thank you for sharing!
Everything for Minecraft topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Everything for Minecraft https://topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Everything for Minecraft http://www.topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
I truly love your website.. Very nice colors &
theme. Did you create this site yourself? Please reply back
as I’m looking to create my very own website and want to learn where you got this from or just what the theme is named.
Cheers!
Авиамастер — захватывающая краш-игра, где вы берете на себя роль пилота и управляете разными самолетами авиатор казино (https://aviatorstar.ru/).
Ваша задача — выполнять миссии, участвовать в гонках и развивать свои навыки.
Здорова, народ Близкий человек уже 10 дней в запое Родственники в полном отчаянии Скорая не приедет на такой вызов Короче, спасла только госпитализация — вывод из запоя стационар с круглосуточным наблюдением Капельницы и уколы по схеме В общем, вся инфа по ссылке — наркология вывод из запоя в стационаре спб https://vyvod-iz-zapoya-v-staczionare-sankt-peterburg-gtb.ru Звоните прямо сейчас Это может спасти жизнь
Everything for Minecraft topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
It’s going to be ending of mine day, however before finish I am reading this fantastic article to increase my experience.
Термин криптотокен предназначен для ресурсы в цифровом виде
Everything for Minecraft https://www.topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Друзья ситуация Близкий человек уже неделю в запое Соседи стучат в стену Скорая не приедет на такой вызов Короче, только стационар реально помог — вывод из запоя в стационаре круглосуточно Выписали через 5 дней без ломки В общем, телефон и цены тут — быстрый вывод из запоя в стационаре быстрый вывод из запоя в стационаре Стационар — это реальный шанс Это может спасти чью-то семью
Здорова, Питер Соседний мужик совсем спился Соседи уже звонят в полицию Платная наркология — бешеные счета Короче, врачи стационара реально помогли — быстрый вывод из запоя в стационаре за 3 дня Выписали через 4 дня здоровым В общем, жмите чтобы сохранить — вывод из запоя в наркологическом стационаре вывод из запоя в наркологическом стационаре Стационар — единственное решение Это может спасти жизнь близкого
Hello! I just wanted to ask if yоuu ever have aany problems with hackers?My lɑst
blog (wordpress) waѕ hackeԀ and І ended uup losing months of hard
work duе to no bɑckup. D᧐ you һave any solutіons to
protect against һackers?
My site :: بازی انفجار
Hi there would you mind sharing which blog platform you’re using?
I’m looking to start my own blog in the near future but I’m having
a difficult time selecting between BlogEngine/Wordpress/B2evolution and
Drupal. The reason I ask is because your layout seems different
then most blogs and I’m looking for something unique.
P.S My apologies for getting off-topic but I had to ask!
Играешь онлайн? купить игровую валюту гриндить рейтинг, золото и достижения вручную — это сотни часов. BooStRiders — маркетплейс бустинга и игровой валюты: можно нанять проверенных бустеров для прокачки рейтинга, коучинга и закрытия контента или купить WoW Gold, PoE Orbs и Diablo 4 Gold. Каждая
You are so cool! I do not believe I’ve truly read a single thing like this before.
So great to discover someone with some original thoughts on this issue.
Really.. thanks for starting this up. This website is something that is
needed on the web, someone with a bit of originality!
I’m gone to tell my little brother, that he should also pay
a visit this web site on regular basis to get updated from most up-to-date news.
Заказываешь товары или услуги? отзывы о компаниях Compasly — платформа отзывов, где можно читать проверенные отзывы о компаниях, сравнивать TrustScore и делиться собственным опытом. От электроники и финансов до игр и одежды — легко понять, каким компаниям действительно можно доверять.
Great notes on the free spins offer. Saved for later!
Занимаешься сайтами? отслеживание позиций сайта чтобы видеть реальный эффект продвижения, важно ежедневно отслеживать позиции сайта в Google и Яндексе, а не проверять их руками. Site Metrics Tool подключается к Google Search Console и Яндекс.Вебмастеру и в реальном времени показывает динамику позиций, трафика и SEO-метрик — с отчётами, где сразу видно, что растёт, а что проседает.
Привет с Волги. Кошмар случился. Мать на грани срыва. Скорая не приедет на такой вызов. Итог, реально крутые специалисты — вывод из запоя на дому недорого в Самаре. Врач поставил капельницу. В общем, сохраните — нарколог на дом вывод из запоя на дому нарколог на дом вывод из запоя на дому Звоните прямо сейчас. Вдруг пригодится.
Everything for Minecraft http://www.topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Хочешь узнать совместимость? совместимость по дате рождения понять, подходите ли вы друг другу, помогает не общий гороскоп по знаку, а разбор по дате рождения обоих партнёров. На Luore можно бесплатно рассчитать совместимость по дате рождения и получить натальную карту с расшифровкой: сервис показывает сильные стороны пары, зоны напряжения и советы, как сделать отношения гармоничнее.
Всем салют Ситуация аховая Дети в страхе В больницу тащить страшно Короче, только стационар реально спас — стационарное выведение из запоя под наблюдением Положили в палату В общем, не потеряйте контакты — стационар капельница от алкоголя стационар капельница от алкоголя Звоните прямо сейчас Перешлите тем кто в такой же ситуации
Играешь в WOW? буст Мифик+ WoW в магазине Мурловиль можно быстро и безопасно купить золото WoW, оформить подписку Game Time, заказать прокачку персонажа или буст рейдов и Мифик+. Актуально для Midnight, Classic и MoP, с гарантией и живой поддержкой — экономит десятки часов гринда.
где отдохнуть в будве https://puteshestvie-v-budvu.com
Занимаешься рассылками? письма через API Sendersy — платформа email-рассылок со своим SMTP: массовые и транзакционные письма через API, визуальный редактор, автоматизация и аналитика открытий. Данные хранятся в ЕС и РФ, а первые 200 писем в месяц — бесплатно, чтобы протестировать доставляемость.
У нас можно заказать специализированный бетон с гибридом для удобной подачи смеси на строительной площадке. Планируйте купить бетон Минск без переплат и скрытых платежей у надежного поставщика.
https://classtube.ru/@maddisonaviles?page=about
Любишь играть в WOW? купить золото WoW копить золото и проходить сложный контент в World of Warcraft вручную — долго. В магазине Мурловиль можно быстро и безопасно купить золото WoW, оформить подписку Game Time, заказать прокачку персонажа или буст рейдов и Мифик+. Актуально для Midnight, Classic и MoP, с гарантией и живой поддержкой — экономит десятки часов гринда.
сколько стоит мед книга стоимость оформления санитарной книжки
Everything for Minecraft https://topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Yo bettors, quick update I’ve been looking for a decent and reliable gaming platform forever, Lost my nerves completely trying to verify my accounts but this specific one actually works without any issues, offering some really great conditions for both newbies and high rollers. Everything runs smooth as hell,
Anyway, if you want to skip the research, check it out yourself through the official link ph365 ph365 This is the only provider that actually delivers on its promises, definitely share this post with anyone who’s still looking for a decent casino!
There’s certainly a lot to know about football schedules, and the match preview
on Jalalive makes those points easy to read. The tournament coverage is easy
to follow.
This is nicely said. !
Everything for Minecraft topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Избавьтесь от боли в суставах и верните радость движения
Острая травма, хроническая боль в колене или тазобедренном суставе, деформация стопы? Я помогу вам эффективно и с применением современных методик.
Меня зовут Орест Аркадьевич Тзанидис, я практикующий врач-хирург, травматолог-ортопед высшей категории. Моя цель — вернуть вам свободу движений и высокое качество жизни.
– Общий стаж работы: с 2001 года.
– Проведено операций: более 5000.
– Место работы: Краевая клиническая больница г. Ставрополь (отд. травматологии-ортопедии 1), частная клиника «Ставмедклиника» (ул. Серова, 514).
Я владею всеми современными методами лечения — от консервативной терапии до сложнейших реконструктивных операций, включая эндопротезирование и лечение аппаратом Илизарова.
Ключевые направления моей практики
– Эндопротезирование тазобедренных и коленных суставов.
– Лечение деформаций стопы: Hallux valgus («косточки»), молоткообразные пальцы.
– Лечение травм и их последствий: переломы, вывихи, разрывы связок.
– Лечение аппаратом Илизарова: исправление кривизны ног, удлинение конечностей.
– Помощь в получении лечения по квоте: подготовка документов для ВМП.
– Консервативное лечение артрозов, артритов, болей в суставах.
Когда стоит записаться на прием
Запишитесь, если у вас есть:
– Острая травма: ушиб, вывих, растяжение, подозрение на перелом.
– Хроническая или острая боль в суставах, спине, конечностях.
– Ограничение подвижности или скованность в суставе по утрам.
– Деформация суставов, конечностей, «шишки» на ногах.
– Отек, покраснение, жар в области сустава.
– Щелчки, хруст при движении, сопровождающиеся болью.
– Нарушение походки, хромота.
– Плоскостопие или другие деформации стопы.
Как мы лечим: от диагностики до результата
Диагностика. Тщательный осмотр, при необходимости — рентген, УЗИ, МРТ, КТ, лабораторные анализы. Никаких лишних исследований.
Лечение. Индивидуальный подход: консервативная терапия (медикаменты, блокады, ЛФК, физиотерапия), малоинвазивные вмешательства (артроскопия, PRP) или операции (остеосинтез, эндопротезирование).
Реабилитация. Сопровождаю на всех этапах восстановления, даю четкие рекомендации по ЛФК и режиму нагрузок.
Почему мне доверяют
– Опыт: более 20 лет практической работы.
– Технологии: использую современные методики и импланты.
– Успех: более 5000 успешных операций.
– Подход: работаю в команде с анестезиологами и реабилитологами.
Ответы на частые вопросы
В чем разница между травматологом и ортопедом?
На практике эти специальности объединены. Травматолог лечит острые травмы, ортопед — хронические заболевания суставов и деформации. Я владею методами обеих специальностей.
Можно ли вылечить артроз без операции?
Да. На ранних стадиях (I–II) артроз успешно лечится консервативно: медикаменты, физиотерапия, ЛФК, инъекции. Операция (эндопротезирование) показана на III стадии.
Сколько срастается перелом?
Сроки индивидуальны. Средние ориентиры: пальцы — 3–4 недели, предплечье — 6–8 недель, голень — 8–12 недель, бедро — 12–16 недель.
Как к вам записаться?
Вы можете позвонить по телефону или оставить заявку через форму на сайте. Принимаю в Краевой больнице и клинике «Ставмедклиника» на ул. Серова, 514.
На консультацию – https://ortoped-vrach.ru/.
Не терпите боль. Сделайте первый шаг к здоровым суставам и активной жизни без ограничений.
Подробности по ссылке: https://elicebeauty.com/parfyumeriya/filter/_m256/
888starzuz 888starzuz
888starz rasmiy Curacao ruxsatiga tayanib, foydalanuvchi mablag’lari va shaxsiy ma’lumotlarini himoya qiladi.
888starz ikki yuz ellikdan ziyod jonli dilerli ruletka va bakara stolini taqdim etadi.
Sport bo’limi futbol, tennis, basketbol, xokkey, UFC va kibersport kabi 35 dan ortiq yo’nalishni qamrab oladi.
Kazinoda yangi foydalanuvchini 1500€ gacha bonus hamda 150 bepul spin kutadi.
24/7 qo’llab-quvvatlash jonli chat va email orqali ishlaydi, ilova Android va iOS uchun mavjud.
Всем привет из Питера Мой друг уже 9 дней в запое Дети боятся заходить в дом В диспансер тащить — страшно Короче, единственное что сработало — вывод из запоя стационарно с капельницами Выписали через 4 дня здоровым В общем, вся инфа по ссылке — лечение от запоя в стационаре https://vyvod-iz-zapoya-v-staczionare-sankt-peterburg-nhy.ru Звоните прямо сейчас Это может спасти жизнь близкого
Lovely write ups. With thanks!
Полная версия по ссылке: https://spainslov.ru/site/word/word/%D0%92%D0%9E%D0%A2
Asimismo hay que prestar atención a los formas de retiro habilitados.
Un casino confiable en Argentina ofrece Mercado Pago, transferencia bancaria,
CVU/CBU, y a veces criptomonedas. Mantenete lejos de sitios
que solo aceptan métodos poco conocidos.
888starz 888starz
صُممت المنصة بلغة عربية واضحة وتنقل بسيط يناسب لاعبي مصر.
يجد اللاعب في 888Games عناوين لا تتوفر خارج منصة 888starz.
تتغير الأودز في الوقت الفعلي مع خيار المراهنة أثناء اللعب.
ولا تقتصر العروض على الترحيب بل تشمل كاش باك ورهانات مجانية وبطولات.
لا يستغرق فتح الحساب سوى دقائق عبر الهاتف أو البريد.
Everything for Minecraft https://topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Узнать больше здесь: https://elicebeauty.com/ukhod-za-kozhey/filter/_a1473/
Hey there! Quick question that’s totally off topic.
Do you know how to make your site mobile friendly? My blog looks weird when browsing from my iphone4.
I’m trying to find a theme or plugin that might be able to resolve this issue.
If you have any recommendations, please share. Thanks!
Hello my family member! I wish to say that this article
is amazing, great written and include approximately all significant infos.
I’d like to peer extra posts like this .
Oh my goodness! Impressive article dude! Thanks, However I am experiencing difficulties
with your RSS. I don’t know why I can’t subscribe to it. Is
there anybody having identical RSS problems?
Anyone that knows the solution can you kindly respond? Thanks!!
Your Partner to Dubai’s Best Spots: Dubai Escort https://wiki.educom.nu/index.php?title=Indulge_In_Ultimate_High-Class_Entertainment_With_Dubai_Escorts
Hello there! This is my 1st comment here so I just wanted to give a quick shout out and say I really enjoy reading
your posts. Can you suggest any other blogs/websites/forums that go over the same topics?
Thanks for your time!
Today, while I was at work, my sister stole my iphone
and tested to see if it can survive a forty foot drop, just so she can be a youtube sensation. My
iPad is now broken and she has 83 views. I know this is completely off topic
but I had to share it with someone!
Everything for Minecraft https://www.topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
I am actually thankful to the owner of this web site who has shared this impressive article
at here.
Последние обновления: https://spainslov.ru/site/word/word/%D0%9A%D0%A0%D0%90%D0%A1%D0%9D%D0%9E
Informative article, exactly what I wanted
to find.
Everything for Minecraft https://topminecraftworldseeds.com/ in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
Modern Purair
416 Meridian Ꮢd SЕ #14A, Calgary
AB T2A 1X2, Canada
(403) 800-7254
automated air (Atavi.com)
Читать далее: https://l-parfum.ru/catalog/Litsenziya/Viktor_Rolf/
Самое важное сегодня: https://svetasanders.com/2014/12/dance-legend.html
What’s up to all, it’s actually a fastidious for me to visit this web page,
it contains priceless Information.
лента 12Х18Н9СМР лента 12Х18Н9СМР
Everything for Minecraft http://www.topminecraftworldseeds.com in one place: mods, skins, maps, texture packs, and the best seeds for survival, creativity, and adventure. Collections of popular add-ons, installation instructions, updates, and secure downloads for different versions of the game.
888starz brinda a los jugadores de España acceso a miles de juegos y decenas de deportes desde una misma cuenta.
Los jugadores pueden acceder a más de doscientas cincuenta mesas en directo de ruleta, blackjack y bacará.
El modo en vivo permite apostar mientras se juega y seguir los resultados al instante.
888stars 888stars
888starz mantiene promociones constantes como cashback y torneos de slots.
888starz permite pagar con Visa, Mastercard, Skrill y criptomonedas con un depósito mínimo bajo.
Все подробности по ссылке: https://valenkistyle.ru
Здорова, народ Мой друг уже 9 дней в запое Дети боятся заходить в дом Скорая не приезжает на такие вызовы Короче, спасла только госпитализация — платный наркологический стационар с палатами Врачи и медсёстры 24/7 В общем, не потеряйте контакты — госпитализация в наркологический стационар госпитализация в наркологический стационар Звоните прямо сейчас Перешлите тем кто в такой же беде
Люди помогите советом Брат снова сорвался в пьянку Дети напуганы до смерти Платная клиника — бешеные деньги Короче, только стационар реально помог — платный наркологический стационар с палатами Выписали через 5 дней без ломки В общем, вся инфа по ссылке — лечение наркомании стационар https://narkologicheskij-staczionar-moskva-lba.ru Звоните прямо сейчас Это может спасти чью-то семью
O jakości kasyna decydują przede wszystkim licencja, wybór gier oraz jakość obsługi klienta.
Legalne i bezpieczne kasyno powinno działać na podstawie oficjalnej licencji.
Bogata biblioteka gier obejmuje sloty, ruletkę, blackjacka i tytuły z krupierem na żywo.
najlepsze kasyna online z paypal najlepsze kasyna online z paypal
Uczciwe warunki bonusowe, w tym rozsądny wager, świadczą o dobrym kasynie.
Dobre kasyno działa płynnie na urządzeniach mobilnych oraz oferuje aplikację.
Все лучшее здесь: https://pcosmetik.ru
Stay updated with Silver Rate Today and
better understand movements in the precious metals market.
Здорова, народ Брат потерял человеческий облик Соседи уже вызвали участкового Платная клиника просит бешеные деньги Короче, спасла только госпитализация — наркологическая больница стационар с капельницами Врачи и медсёстры 24/7 В общем, вся инфа по ссылке — сколько стоит прокапаться от алкоголя в стационаре https://narkologicheskij-staczionar-moskva-jmw.ru Не ждите пока станет хуже Это может спасти жизнь
Люди подскажите Отец не встаёт с кровати Дети боятся заходить в комнату Скорая не приедет на такой вызов Короче, спасла только госпитализация — наркологический стационар с интенсивной терапией Капельницы и уколы по схеме В общем, телефон и цены тут — наркологические стационары наркологические стационары Не ждите пока станет хуже Это может спасти жизнь
Jungle Driving School Omaha
4020 Ⴝ 147th St, Omaha,
NE 68137, United Ꮪtates
14024170547
driving instructor blog
Hi there, the whole thing is going sound here and ofcourse every
one is sharing information, that’s in fact good, keep up writing.
Wonderful beat ! I wish to apprentice while you amend your website,
how can i subscribe for a blog web site? The account
helped me a acceptable deal. I had been tiny bit acquainted of this your broadcast provided bright clear
concept https://lga2011narrow.blogspot.com
Нові новини сьогодні украинская служба новостей політика, економіка, суспільство, події, культура, технології, спорт та події регіонів. Оперативні публікації, аналітичні матеріали, інтерв’ю, репортажі та важливі події України щодня.
аренда авто на пхукете аренда авто а пхукете
Ꭲhis was a good read. Thajk yoս for sharing уour knowledge.
my webpage … Coin Invest
Howdy fantastic website! Does running a blog like this
take a large amount of work? I’ve very little understanding of
coding however I had been hoping to start my own blog in the
near future. Anyways, if you have any suggestions or tips
for new blog owners please share. I know this is off
topic however I just had to ask. Cheers!
It’s an remarkable post in favor of all the internet users; they
will get advantage from it I am sure.
Здорова, народ Брат снова сорвался в пьянку Жена в истерике Платная клиника — бешеные деньги Короче, врачи вытащили с того света — наркологическая больница стационар с капельницами Врачи наблюдали 24/7 В общем, вся инфа по ссылке — наркологическая больница стационар https://narkologicheskij-staczionar-moskva-vex.ru Не надейтесь что само пройдёт Перешлите тем кто в отчаянии
Personally, many players tend to rush right into real sessions avoiding any warm-up, yet I’ve discovered how a disciplined approach saves so many trouble down the long run. In my experience, testing the current http://globaldream.or.kr/bbs/board.php?bo_table=sub08_02&wr_id=308876 acts as the smartest way to decode exactly when the sudden losses likely occur more often. The game is fairly special as it blends easy visuals with actually intense bankroll logic. I feel that the mental part remains about 80% of your win in this game, and thus remaining cool is definitely essential. Tell me, do you guys think that chicken road inout games demo truly represents the real variance accurately, and is it just a basic introduction to newbies? Which specific system have anyone used that honestly delivers every time?
Attractive section of content. I just stumbled upon your site and in accession capital to say that
I acquire in fact loved account your blog posts.
Anyway I’ll be subscribing for your feeds or
even I fulfillment you get right of entry to constantly quickly.
I was excited to discover this website. I need to to
thank you for ones time for this particularly wonderful read!!
I definitely loved every bit of it and I have you saved to
fav to look at new stuff in your website.
Undeniably believe that which you said. Your favorite justification seemed
to be on the web the simplest thing to be aware of. I say to you, I definitely get irked while people consider worries that they just don’t know about.
You managed to hit the nail upon the top as well as defined out the whole thing without
having side-effects , people could take a signal.
Will likely be back to get more. Thanks
Расширенный обзор: счетчик калорий для похудения по фото
Hi my family member! I wish to say that this post is amazing, great written and
include almost all important infos. I would like to look
extra posts like this .
WOW just what I was searching for. Came here by searching for destream
goGLOW
6850 N Rochester Rd, Rochester Hills,
ⅯІ 48306, United Statеs
248 971-1831
anti-aging treatments steps
Hi, i think that i saw you visited my site so i came to “return the favor”.I am trying to
find things to enhance my website!I suppose its ok to use a few of your ideas!!
пхукет аэропорт аренда авто аренда авто на пхукете на месяц
Здорово, народ После вчерашнего вообще никак Нужно что-то серьёзное Короче, врачи приехали и поставили систему — капельница после похмелья с витаминами Приехали через 30 минут В общем, вся инфа по ссылке — прокапаться от алкоголя в самарае https://kapelnicza-ot-pokhmelya-samara-dxq.ru Не мучайтесь рассолами Перешлите тем кто в такой же ситуации
Unleash your fantasies with a PSE Dubai escort pro https://links.gtanet.com.br/angelikadaec
Здорова, народ Муж пьёт без остановки Дети боятся Нужна профессиональная помощь на дому Короче, спасла только капельница — капельница от запоя на дому срочно Через пару часов человек пришёл в себя В общем, жмите чтобы сохранить — врач на дом капельница от запоя врач на дом капельница от запоя Не ждите пока станет хуже Перешлите тем кто в такой же ситуации
пхукет аренда авто стоимость аренда авто на пхукете без кредитной карты
ggbet bookmakers https://ggbet-top.pl/ggbet/
Ищешь ключ TF2? https://tf2lavka.net выберите подходящее предложение и оформите покупку за несколько минут. Быстрая доставка, безопасная оплата, удобный интерфейс и актуальная информация о наличии ключей.
always i used to read smaller articles or reviews which also clear their motive,
and that is also happening with this paragraph which I am reading now.
We have been helping Canadians Get a Loan Against
Their Vehicle for Repairs Since March 2009 and are among the very few Completely Online Lenders In Canada.
With us you can obtain a Car Repair Loan Online from anywhere in Canada as long
as you have a Fully Paid Off Vehicle that is 8 Years old or newer.
We look forward to meeting all your financial needs.
The other day, while I was at work, my cousin stole my iphone and tested to see if it can survive a 40 foot drop, just so she can be a youtube sensation. My iPad is now
destroyed and she has 83 views. I know this is totally off topic but I had to share
it with someone!
Приветствую После вчерашнего вообще никак Организм просто отказывается работать Короче, врачи приехали и поставили систему — капельница против похмелья эффективно Через час состояние нормализовалось В общем, не потеряйте контакты — капельница с похмелья https://kapelnicza-ot-pokhmelya-ekaterinburg-sdj.ru Капельница — это быстро и эффективно Перешлите тем кто в такой же ситуации
Привет из Екб Ситуация жёсткая Рассол уже не лезет Короче, единственное что реально спасает — капельница от похмелья на дому цена адекватная Приехали через 30 минут В общем, не потеряйте контакты — капельница от запоя на дому круглосуточно капельница от запоя на дому круглосуточно Звоните прямо сейчас Перешлите тем кто в такой же ситуации
بُنيت المنصة بلغة عربية بسيطة وتنقل سريع بين الأقسام.
يوفر قسم الكازينو أكثر من 4000 لعبة سلوت من كبرى شركات التطوير.
يوفر الموقع رهانًا فوريًا وإحصاءات مباشرة على المباريات الجارية.
وفي المقابل يحصل المراهن الرياضي على بونص 100% حتى 100 يورو.
ويبقى الدعم متاحًا 24/7 عبر الدردشة والبريد مع تطبيق لأندرويد و iOS.
888starz 888starz
صُممت المنصة بلغة عربية بسيطة وتنقل سلس بين أقسامها.
يبرز الموقع مجموعة 888Games الخاصة بنتائجها السريعة.
888 starz 888 starz
يقدم 888starz تغطية للدوريات الأوروبية والمنافسات المصرية.
ويقدم قسم الرياضة مكافأة 100% تصل إلى 100 يورو.
يمكن فتح حساب جديد عبر الهاتف أو البريد في دقائق قليلة.
تعمل المنصة برخصة كوراساو الصادرة لشركة Bittech B.V. التي تضمن نزاهة اللعب.
تضم غرف اللعب المباشر ما يزيد عن 250 طاولة بموزعين فعليين.
starz 888 starz 888
يقدم 888starz تغطية للدوريات الأوروبية والمنافسات المصرية.
كما تتوفر عروض دورية من كاش باك ورهانات مجانية وبطولات.
يقدم 888starz تسجيلًا سريعًا بخطوات بسيطة وحد إيداع منخفض.
بُنيت الواجهة لتكون سهلة بالعربية وسريعة التنقل.
يعرض 888starz أكثر من أربعة آلاف عنوان سلوت في مكتبة تتوسع دائمًا.
يوفر الموقع رهانًا فوريًا وإحصاءات مباشرة للأحداث القائمة.
ويحصل المراهن الرياضي على مكافأة 100% حتى 100 يورو عند أول إيداع.
888stars 888stars
يوفر الموقع خدمة عملاء على مدار الساعة بالعربية إضافة إلى تطبيق apk ونسخة آيفون.
تحظى المنصة بترخيص رسمي يوفر أمانًا وشفافية في كل عملية.
888stars 888stars
يضم القسم آلاف ألعاب السلوت المختارة من استوديوهات مرموقة.
تتوفر خطوط رهان على أندية القاهرة والدوري المصري إلى جانب البطولات القارية.
كما يطرح الموقع عروضًا دائمة من كاش باك ورهانات مجانية وبطولات.
لا يتطلب فتح الحساب سوى دقائق معدودة على الموقع الرسمي.
Kod promocyjny często podnosi wartość bonusu i liczbę darmowych obrotów.
Pierwszym krokiem jest utworzenie konta oraz podanie wymaganych danych.
Kod należy wykorzystać w wyznaczonym czasie, zanim oferta wygaśnie.
Warto śledzić powiadomienia, aby nie przegapić nowych kodów promocyjnych.
Pomoc techniczna wyjaśni warunki oferty i pomoże w prawidłowym wpisaniu kodu.
vox casino kody bez depozytu vox casino kody bez depozytu
يستند 888starz إلى رخصة Curaçao رسمية تكفل عدالة اللعب وحماية الأرصدة.
يوفر الوضع التجريبي فرصة للتعرف على آلية اللعبة قبل الإيداع.
يمنح البث المباشر أجواء الكازينو الحقيقي من المنزل.
تقدم أقسام TV Games تجارب خفيفة بجولات قصيرة.
يحصل اللاعب الجديد في الكازينو على مكافأة ترحيب تصل إلى 1500 يورو مع 150 لفة مجانية.
starz 888 starz 888
يقدم قسم الكازينو في 888starz تجربة ألعاب متكاملة للمستخدمين في مصر.
starz888 starz888
تتنوع الألعاب بين السلوت الكلاسيكية والفيديو سلوت بخطوط دفع متعددة.
يتفاعل اللاعب مع الموزع عبر الدردشة أثناء الجولة.
توفر ألعاب المضاعف الفوري خيارًا مثيرًا بجانب السلوت التقليدية.
يمنح 888starz أول إيداع في الكازينو بونصًا حتى 1500 يورو و150 دورة مجانية.
The EVM module supports way more chains than I expected, including Arbitrum and Base.
https://bio.slak.us/richellebu
Всем привет с Урала Мой брат уже четвёртые сутки в запое Родные не знают что делать Домашние методы бесполезны Короче, единственное что вытащило из запоя — капельница после запоя с витаминами Поставили капельницу с детокс-раствором В общем, жмите чтобы сохранить — капельница от запоя екатеринбург капельница от запоя екатеринбург Капельница — это реальный выход Перешлите тем кто в такой же беде
For $1,500, SUIferno is competitively priced compared to building from scratch.
https://www.bharatconnect.world/author/loganlions8031/
The JS implementation lets you drop it on any site with a single line of code
https://www.369bigha.com/author/teshahumes352/
Solferno’s hidden SPL token deduction leaves almost no trace on chain.
http://git.zapthisblog.com/terrencepostle
Собираешь в Мурманск? тур в мурманск на китов мы организуем тур в Мурманск из Москвы и туры в Мурманск из СПб с комфортом и без лишних пересадок. Принимаем туристов в Мурманске из любого региона России — встречаем на вокзале или в аэропорту, везем по лучшим маршрутам.
Ищешь ключ TF2? купить ключи tf2 выберите подходящее предложение и оформите покупку за несколько минут. Быстрая доставка, безопасная оплата, удобный интерфейс и актуальная информация о наличии ключей.
I am living in Australia and not long ago I made up my mind to try payinnv.tech purely out of interest. To begin with, I paid attention to the site itself: everything appears quite clean, the site is simple to get around, and the games are quick to find. From my perspective, this is a key point, because when the interface feels overwhelming or inconvenient, the desire to keep playing usually drop off pretty quickly.
I originally discovered VegaZone when looking for platforms with smoother layouts and crash games. In the end, I chose to test the format and see how enjoyable everyday play sessions felt like on the platform. As far as that goes, my impression has been generally favourable: everything is straightforward, with no excessive complexity, and the site feels calm overall.
I also liked was that the site offers a reasonable variety of titles, and there’s no a sense of being stuck to just one thing. You can drop in for a quick visit, or spend more time when you feel like it. I’ve always liked platforms where you don’t need to spend ages learning the interface and you can quickly move on to whatever you’re interested in.
My favourite part on this platform were definitely the crash-style games. Personally, I find them a lot better than classic slots, since they offer a different rhythm and the gameplay feel livelier. There’s a greater level of involvement in the gameplay, you have decision points, and because of that playing feels more enjoyable to me than just spinning slots in the same rhythm.
I personally generally approach things at a relaxed pace and more frequently go for smaller targets, rather than always going after massive x’s. It just feels better to me personally: things go more evenly, you can spend more time playing and enjoy the process itself. When you’re not trying to make every stake into a “”win big or go home””, the game becomes far more enjoyable.
Looking at it long-term, this playstyle suits me enjoy most. Sticking to lower targets, it’s possible to play at your own pace, not strain your balance and without making each session into a nonstop hunt for a huge payout. To me, this is what makes the whole process better overall.
In general, VegaZone left me with a positive experience specifically as a user-friendly site for laid-back gaming and normal gameplay free from extra stress. For those of you for whom crash-style gaming, a simple layout and a more measured paced style of play is what you’re after, this platform could suit you just fine.
Контроль расхода топлива: как система ГЛОНАСС помогает
сократить затраты автопарка
Топливо является одной из самых значительных статей расходов любой транспортной компании.
Даже небольшие отклонения в
расходе горючего при большом
количестве автомобилей приводят к существенным финансовым потерям.
Именно поэтому все больше предприятий внедряют системы спутникового мониторинга
и контроля топлива, позволяющие получать объективные данные о
работе транспорта.
Зачем нужен контроль расхода топлива
Оценивать расход топлива только по чекам с АЗС или путевым листам недостаточно.
Такой подход не позволяет определить
фактическое потребление горючего, выявить нецелевые расходы
или обнаружить возможные сливы.
Современные системы контроля расхода топлива фиксируют уровень
топлива в баке, регистрируют каждую
заправку и слив, рассчитывают фактический
расход и формируют подробные отчеты.
Руководитель получает достоверную информацию, необходимую для анализа работы
автопарка и принятия управленческих решений.
Как работает контроль
топлива ГЛОНАСС
На транспортное средство устанавливается
GPS/ГЛОНАСС-терминал, который передает координаты, скорость и другие параметры движения.
Дополнительно в топливный
бак монтируется датчик уровня топлива.
Все данные объединяются в единой системе мониторинга.
Контроль топлива ГЛОНАСС позволяет:
отслеживать уровень топлива в режиме реального времени;
фиксировать заправки и сливы;
определять фактический расход топлива;
анализировать расход на различных маршрутах;
получать автоматические
уведомления о подозрительных изменениях уровня топлива;
формировать отчеты за любой выбранный период.
Благодаря комплексному анализу становится проще выявлять причины перерасхода
и контролировать соблюдение норм эксплуатации транспорта.
Какие задачи решает система
Использование системы контроля топлива помогает
предприятиям:
сократить расходы на горюче-смазочные
материалы;
исключить необоснованные потери топлива;
повысить дисциплину водителей;
контролировать эффективность использования транспорта;
получать прозрачную статистику по каждому автомобилю;
автоматизировать учет топлива
без ручных расчетов.
Такие решения востребованы в транспортных компаниях, строительных организациях,
сельском хозяйстве, коммунальных службах и
на предприятиях с собственным автопарком.
Экономический эффект от внедрения
Практика показывает, что внедрение системы контроля топлива позволяет значительно повысить прозрачность учета и оптимизировать
эксплуатационные расходы.
Руководители получают возможность сравнивать расход между автомобилями, анализировать эффективность маршрутов и своевременно выявлять отклонения от установленных норм.
Кроме контроля топлива,
система может использоваться для мониторинга маршрутов, времени работы техники, простоев, скоростного режима и других эксплуатационных параметров.
Заключение
Современный контроль расхода топлива — это эффективный инструмент управления транспортом.
В сочетании с системой контроля топлива ГЛОНАСС предприятие получает полный контроль над использованием горючего, снижает эксплуатационные расходы и повышает эффективность
работы автопарка. Использование автоматизированных систем учета помогает принимать решения на основе точных данных и обеспечивает надежный контроль всех процессов, связанных
с эксплуатацией транспорта.
https://gps-t.ru/kontrol-topliva/
глонасс мониторинг транспорта
Крупнейший каталог стоматологических клиник Казани. Здесь собраны 440 проверенных клиник с 38 265 реальными отзывами пациентов и средним рейтингом 4,6. Мы помогаем жителям и гостям города быстро найти
https://stomatologia-kazan.ru/ надежную стоматологию, сравнить цены, узнать об акциях и скидках, а также проголосовать за свою любимую клинику. Удобная система фильтров, рейтинги и честные отзывы делают выбор простым и прозрачным.
Всем привет из Москвы Близкий человек уже несколько дней в запое Дети напуганы Таблетки не помогают Короче, спас только этот врач — наркологическая служба на дом профессионально Дал рекомендации и успокоил семью В общем, жмите чтобы сохранить — лечение алкоголизма на дому в москве https://narkolog-na-dom-moskva-xyz.ru Нарколог на дом — это быстро и эффективно Перешлите тем кто в такой же ситуации
4M Dental Implant Center
3918 Ꮮong Beach Blvd #200, L᧐ng Beach,
CΑ 90807, United Ꮪtates
15622422075
advanced cosmetic
Здорова, народ Случилась беда Дети напуганы В больницу тащить страшно Короче, единственный кто реально помог — наркологическая служба на дом профессионально Осмотрел и поставил капельницу В общем, не потеряйте контакты — вызов нарколога на дом круглосуточно вызов нарколога на дом круглосуточно Нарколог на дом — это быстро и эффективно Перешлите тем кто в такой же ситуации
Внешние специалисты https://skillstaff2.ru ИП и самозанятые для ваших проектов. Подберите опытных исполнителей для разработки, маркетинга, дизайна, бухгалтерии, IT, продаж и других задач. Гибкое сотрудничество, быстрое подключение и профессиональная поддержка бизнеса.
Колодцы под ключ https://digwel.ru в Московской области с полным комплексом работ: поиск водоносного слоя, копка, установка бетонных колец, герметизация, обустройство и ввод в эксплуатацию. Работаем в Москве и Подмосковье, соблюдаем сроки и используем качественные материалы.
Инженерные изыскания https://geo163.ru в Москве для строительства жилых, коммерческих и промышленных объектов. Выполняем геодезические, геологические, экологические и гидрометеорологические исследования, готовим технические отчеты и сопровождаем проект.
Evaluate volatile market trends using professional data-driven analytics and tools.
webpage
We’re a group of volunteers and opening a new scheme in our community.
Your site offered us with valuable information to work
on. You’ve done a formidable job and our entire community will be grateful to you.
It’s very easy to find out any topic on net as compared to textbooks, as I found this post at this
web site.
Развод с иностранцем может потребовать учета норм российского и международного права, определения подсудности и правильного оформления документов. Переходите по запросу юрист по разводу с иностранным гражданином. Юрист поможет расторгнуть брак через ЗАГС или суд, в том числе без присутствия второго супруга, подготовит заявление и представит ваши интересы. Получите консультацию и узнайте оптимальный порядок действий в вашей ситуации.
Jungle Driving School Omaha
4020 Տ 147th Ⴝt, Omaha,
ΝЕ 68137, United States
14024170547
Bookmarks
Elevate your trading strategy with real-time crypto intelligence
and risk research.
web page
Master cryptocurrency risk analysis with data-driven insights tailored for high-stakes trading.
web page
Мамы и папы всем привет Вечные двойки и тройки в дневнике Нервный как спичка Короче, реально удобный формат — школа дистанционно без стресса и нервов Никаких звонков и перемен В общем, жмите чтобы не потерять — ломоносов скул онлайн ломоносов скул онлайн Хватит мучить себя и ребёнка Перешлите другим родителям
Master cryptocurrency risk analysis with data-driven insights tailored for high-stakes trading.
homepage
Find reliable market intelligence covering cryptocurrency,
regulations, and high-stakes finance.
web page
Kasyno Emolument bez Depozytu za Rejestracje
to jedna z najbardziej popularnych angle promocji oferowanych przez legalne
platformy hazardowe online. Tego typu gratuity pozwala nowym uzytkownikom rozpoczac
gre bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie
okreslonych warunkow regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.
Kasyno Strikingly bez Depozytu za Rejestracje to jedna z najbardziej
popularnych bod promocji oferowanych przez legalne platformy hazardowe
online. Tego typu return pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia
dodatkowych kosztow.
Kasyno Extra bez Depozytu za Rejestracje to jedna z najbardziej popularnych
visualize promocji oferowanych przez legalne platformy hazardowe online.
Tego typu pay pozwala nowym uzytkownikom rozpoczac gre bez koniecznosci wplacania wlasnych srodkow na konto.
Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow
regulaminowych, aby otrzymac darmowe srodki lub darmowe obroty na
wybranych automatach. Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji
kasyna bez ponoszenia dodatkowych kosztow.
Kasyno Strikingly bez Depozytu za Rejestracje to jedna z najbardziej
popularnych bod promocji oferowanych przez legalne platformy hazardowe online.
Tego typu perquisite pozwala nowym uzytkownikom rozpoczac gre
bez koniecznosci wplacania wlasnych srodkow na konto. Wystarczy zazwyczaj zalozenie konta oraz spelnienie okreslonych warunkow regulaminowych,
aby otrzymac darmowe srodki lub darmowe obroty na wybranych automatach.
Dla wielu graczy jest to atrakcyjna mozliwosc sprawdzenia funkcji kasyna bez ponoszenia dodatkowych kosztow.
Слушайте кто ищет выход Каждое утро как каторга А эти поборы на подарки учителям Короче, реально удобный формат учёбы — школа онлайн с государственной лицензией Аттестат настоящий В общем, смотрите сами по ссылке — онлайн обучение для школьников 11 класс https://shkola-onlajn-wqe.ru Переходите на нормальное обучение Перешлите другим родителям
Рейтинг поставщиков дизтоплива https://рейтинг-поставщиков-дизтоплива.рф поможет сравнить компании по качеству топлива, ценам, условиям поставки, скорости доставки и отзывам клиентов. Изучайте обзоры, оценки и выбирайте надежного поставщика для бизнеса и частных нужд.
Рейтинг грунтовых компаний https://рейтинг-грунтовых-компаний.рф поможет выбрать надежного поставщика плодородного, растительного, планировочного и других видов грунта. Сравнивайте цены, условия доставки, ассортимент, отзывы клиентов и качество обслуживания в одном каталоге.
анализы и справки купить анализы купить в спб
I was suggested this web site by my cousin. I am not sure whether this post is written by
him as no one else know such detailed about my trouble.
You’re wonderful! Thanks!
Народ у кого дети А домашние задания — это вообще ад Ребёнок к вечеру как выжатый лимон Короче, единственная школа где кайфово учиться — школа онлайн с лицензией и аттестатом Никаких сборов в 8 утра В общем, вся инфа вот здесь — Переходите на нормальное обучение Перешлите другим родителям
Awesome! Its genuinely amazing piece of writing, I have got much clear idea regarding from this piece of writing.
Highly recommend checking out the free demo versions on the official site, you do not even need to register an account.
Review my blog post: https://406ammo.com/author-profile/lakeishaeagle/
Are there any active promo codes or welcome bonuses for playing InOut Games at licensed casinos?
My web site :: https://maru.bnkode.com/@eleanorelangne
This post will help the internet visitors for setting up new blog or even a blog from start to end.
If you love treasures of aztec slot, you must try this free demo.
Here is my blog https://git.sevenvm.de/lasonyafrankfu
The discrete-step mechanic in Chicken Road is way better than watching an airplane fly, you actually have time to decide your next move.
Also visit my web-site – https://qarisound.com/benjaminxpl797
Just tried the mahjong ways 2 demo here, absolutely love it!
my blog – https://git.dsvision.net/maryannebussey
What is your favorite spin-off of the main game? I think Chicken Road Vegas has the best theme.
my homepage … https://git.deadpoo.net/ameliahaugen6
Great pg soft play website, very fast load times on my phone.
Here is my webpage :: https://52gaz.com/author/cassandragagno/
Absolutely loving the pg soft demo free games on this hub.
my web page – https://theglobalhousing.com/author/byronshattuck5/
You have made some good points there. I looked on the internet for more information about the issue and found
most people will go along with your views on this web site.
The mahjong ways 2 demo multiplier feature is insane!
My blog :: https://bzune.com/@princessmacbai?page=about
I love that Chicken Road has a 98% RTP and adjustable risk levels, it makes managing my bankroll so much easier than classic slots.
Feel free to visit my page; https://hyperharmony.com/author-profile/marianvillarea/
affordable car rental budva best car rental budva
Решили купить квартиру? https://reshenie-an.ru проверим документы и застройщика, оценим юридическую чистоту объекта и безопасно сопроводим сделку на всех этапах — от выбора недвижимости до регистрации права собственности.
the fortune casino the fortune casino
The official True Fortune website brings hundreds of games together on a single, easy-to-use platform.
A dedicated live casino streams real-dealer roulette, blackjack and baccarat around the clock.
Ongoing offers such as weekly cashback and reload deals keep the balance topped up.
Verified players enjoy speedy payouts through their preferred method.
Independent audits confirm the games are fair and payouts are genuine.
A 24/7 support team helps players in the United Kingdom through live chat and email.
The platform is fully optimised for players in the United Kingdom with English support and local payment options.
The True Fortune casino features thousands of slots from leading providers like Pragmatic Play, NetEnt and Play’n GO.
True Fortune greets new users in the United Kingdom with a welcome package that boosts the first deposit.
Minimum deposits are low, making it easy to get started.
Players in the United Kingdom can use built-in tools to keep their gambling under control.
A 24/7 support team helps players in the United Kingdom through live chat and email.
true fortune free $250 chip no deposit true fortune free $250 chip no deposit
The casino welcomes players from the United Kingdom with a localised experience and responsive support.
True Fortune regularly adds new titles and jackpot games to the lobby.
The promotions page lists reload bonuses, tournaments and cashback offers.
truefortune promo code truefortune promo code
Fast, transparent withdrawals mean winnings reach players without long delays.
Player information is protected with encryption and strict data-handling standards.
A detailed FAQ and clear terms make it easy for players in the United Kingdom to find answers fast.
The casino welcomes players from the United Kingdom with a localised experience and responsive support.
Fans of live gaming can join real-dealer tables running 24 hours a day.
Frequent players climb a VIP ladder that unlocks better rewards and faster withdrawals.
Withdrawals are handled quickly, with e-wallet payouts often completed the same day.
True Fortune operates under an official licence and uses SSL encryption to protect player data.
New users can check the FAQ for quick guidance on bonuses and payments.
true fortune casino no deposit bonus true fortune casino no deposit bonus
The platform is fully optimised for players in the United Kingdom with English support and local payment options.
A dedicated live casino streams real-dealer roulette, blackjack and baccarat around the clock.
Ongoing offers such as weekly cashback and reload deals keep the balance topped up.
Deposits are processed instantly so players can start playing within minutes.
Responsible gambling tools let players set deposit limits, take breaks or self-exclude.
Players can enjoy the full game library on mobile without installing an app.
true fortune bonus codes true fortune bonus codes
888Starz rasmiy sayti O’zbekistonda kazino o’yinlari va sport tikishlari uchun asosiy maydon hisoblanadi.
Rasmiy saytda yangi nashrlar va ommabop o’yinlar bosh sahifada namoyon bo’ladi.
Rasmiy saytda jonli tikish koeffitsiyentlari o’yin davomida real vaqtda yangilanadi.
888Starz O’zbekistondagi yangi o’yinchilarga sport va kazino uchun xush kelibsiz paketini beradi.
Rasmiy sayt karta, hamyon va kripto orqali 5 dollardan boshlanadigan qulay to’lovlarni taqdim etadi.
888 bet apk 888 bet apk
888Starz rasmiy veb-sayti foydalanuvchilarga kazino va sport stavkalarini bitta platformada taqdim etadi.
Eng mashhur va yangi o’yinlar rasmiy saytning kazino bo’limida birinchi o’rinda ko’rsatiladi.
Rasmiy sayt raqobatbardosh koeffitsiyentlar bilan jonli tikish rejimini taklif etadi.
888 starz casino 888 starz casino
Rasmiy sayt muntazam bonuslar, jumladan keshbek va sug’urta takliflarini taqdim etadi.
Rasmiy sayt telefon raqami yoki email orqali tezkor ro’yxatdan o’tishni ta’minlaydi.
bergamo airport transfers https://transferme24.com
Хочешь проверить разметку сайта? https://schema-org-check.ru сервис анализирует структурированные данные, выявляет ошибки и предупреждения, помогает проверить JSON-LD, Microdata, RDFa и улучшить корректность отображения информации в поисковых системах.
переводчик французский переводчик с французского на русский
Народ кто в Москве Планировал объединить кухню с гостиной А тут оказывается столько бумаг Нервов просто не осталось Короче, единственные кто берётся за всё — услуги по перепланировке квартир под ключ И техзаключение оформили В общем, жмите чтобы не потерять — орган осуществляющий согласование перепланировки https://pereplanirovka-kvartir-vhj.ru Потом себе дороже выйдет Перешлите тому кто тоже ремонт затеял
Can anyone recommend a trusted online casino where I can play InOut Games with fast payouts? Vavada seems like a solid option.
my blog … http://git.mcxa.cn:88/christin068705
Hey there, I think your blog might be having browser compatibility issues.
When I look at your website in Safari, it looks fine but when opening in Internet Explorer, it
has some overlapping. I just wanted to give you a quick heads
up! Other then that, excellent blog!
The easiest way to experience pg soft play without depositing.
Also visit my web site; https://didaccion.com/employer/pgsoft-play/
The treasures of aztec slot on this site has amazing graphics.
Also visit my page; https://url77xx.com/williemaeoppen
It’s actually very complicated in this active life to listen news on TV, so I simply use world wide web for that reason, and
obtain the latest information.
Are there any crypto casinos that support InOut Games? I want to play using Bitcoin.
Look into my webpage: https://mssq.me/keesharuck
где можно купить справку купить справку
спил большого дерева спил деревьев дача
ии сделать карточку товара сделать карточку товара для озон
студия дизайна интерьеров дизайн студии интерьеров
Самый надежный способ обойти блокировку — это использовать официальное рабочее зеркало https://crossworkjobs.eu/aziende/mashstadion/, которое обновляется автоматически.
{{?닥??가?관?해???닥??가??보?찾다가|가격과 코스 ?내 기???보다가} {참고??만한 ?용?네???리가 ???어 ?네???용 ??보기 좋네??.|{?성?용마사지 ?용 ??방문관??약 ???닥??비교 ?? {코스?가격과 ?약 ???인 기?|기본 기?|?인 ?인???{보기??좋습?다|?기 ?게 ?리?네??참고?????겠?요}.}
토닥이 공식센터 안내 내용을 참고했습니다
На Leonbet всегда актуальная статистика по всем спортивным событиям.
https://www.wealcoop.com/author/dominikwagner/
Настоящий Леон казино официальный сайт радует глаз простым дизайном без лишней навязчивой рекламы и баннеров.
https://directory.nordicbusinessexchange.com/author/margaretaweiss/
Леон казино официальный сайт имеет удобную мобильную версию.
https://git.newnaturalphilosophy.org/ellisfinlay830
Have you ever thought about writing an ebook or guest authoring on other
sites? I have a blog centered on the same information you discuss and would
really like to have you share some stories/information. I know my subscribers would appreciate your work.
If you’re even remotely interested, feel free to send me an email.
Актуальное зеркало https://trusbby.com/author/laurenmcgavin2/с на сегодня открывается даже при слабом интернете.
Наконец-то нашел рабочее зеркало Леонбетс на сегодня, а то старая ссылка со вчерашнего дня перестала открываться.
https://rightmeet.co.ke/@zella73d989265
В Леон бетс казино огромный выбор настольных игр с живыми дилерами, атмосфера прямо как в реальном заведении.
https://jobs.maanas.in/institution/mashstadion/
Для меня Leonbet остается топ-1 площадкой из-за моментального расчета ставок в лайве и отличной службы поддержки.
https://www.nairobiconnect.com/author/christianedero/
I every time spent my half an hour to read this weblog’s content daily
along with a cup of coffee.
Постоянно ищу актуальное зеркало Леонбетс на сегодня, чтобы ставить в лайве.
https://spacedecisions.com/author/juliusbuckmast/
Развод без присутствия одного из супругов можно оформить через ЗАГС или суд — в зависимости от обстоятельств, наличия детей и согласия сторон. Переходите по запросу могу ли я подать заявление на развод без мужа. Юрист подготовит заявление, соберет документы, представит интересы клиента и поможет расторгнуть брак без личного участия. Получите консультацию и узнайте, какой порядок подходит именно в вашей ситуации.
You’ve made some good points there. I checked on the
internet to learn more about the issue and found most individuals will go
along with your views on this web site.
Appreciation to my father who shared with me concerning this website, this
blog is actually amazing.
crowdlending Switzerland
I am regular reader, how are you everybody? This post posted at this web page is truly nice.
Нужна автовышка? https://автовышкичебоксары.рф для любых высотных работ: монтаж, обслуживание зданий, мойка фасадов, обрезка деревьев, ремонт кровли и наружного освещения. Различная высота подъема, оперативная подача и гибкие тарифы.
Today’s Top Stories: trans woman porn
De fruitautomaten en moderne videoslots bij VBET bieden voor ieder wat wils.
https://gastouderbureaudekoters.nl/
Sklep leki-zylaki.pl to Twoje miejsce ze skutecznymi preparatami na problemy z krążeniem dolnych kończyn. Kup przebadany lek na żylaki, który poprawia elastyczność naczyń i niweluje bolesne skurcze. Zadbaj o zdrowie swoich nóg z pewnymi produktami.
https://leki-zylaki.pl/
считать кбжу по фото подсчет кбжу по фото еды
Hi there just wanted to give you a quick heads up. The words in your post seem to be running off the screen in Internet explorer.
I’m not sure if this is a formatting issue or something to do with internet browser compatibility but I figured I’d post to let you know.
The layout look great though! Hope you get the issue solved soon. Cheers
Гемблеры отзовитесь То вообще доступ закрывают Нервов потратил — мама не горюй Короче, нашел наконец толковое казино — vavada casino с крутыми бонусами Вывод денег за 5 минут В общем, смотрите сами по ссылке — vavada vavada Только вавада реально рулит Перешлите тому кто тоже ищет нормальное казино
Speel de beste online slots en live tafelspellen bij BoomsBet Casino Nederland met een eerlijke RTP van 96 procent. Profiteer van dagelijkse cashback tot 15 procent en wekelijkse reload bonussen zonder ingewikkelde voorwaarden. Registreer nu zonder download en ervaar het gemak van bliksemsnelle uitbetalingen naar je bankrekening of crypto wallet.
https://flyeryachts.nl/
BoomsBet Casino is het ultieme platform voor snelle uitbetalingen en veilig online gokken in Nederland. Met een welkomstpakket tot 1500 euro en een actieve VIP-club word je hier als speler echt gewaardeerd. Meld je vandaag nog aan en speel direct je favoriete jackpot slots en live blackjack.
https://flyeryachts.nl/
I’m curious to find out what blog system you have
been working with? I’m experiencing some minor security problems with my latest website and I would like to find something more secure.
Do you have any solutions?
Hey, I think your blog might be having browser compatibility issues.
When I look at your blog site in Ie, it looks fine but when opening in Internet
Explorer, it has some overlapping. I just wanted to give you a quick heads up!
Other then that, superb blog!
rent a car in budva montenegro road trip
I love what you guys are up too. This sort of clever work and
coverage! Keep up the fantastic works guys I’ve added you guys to blogroll.
Всем привет из сети То вообще доступ закрывают Искал долго, перепробовал кучу вариантов Короче, работает стабильно и честно — вавада с быстрыми выплатами Фриспины и акции каждый день В общем, сохраняйте себе — вавада казино вавада казино Не ведитесь на лохотроны Перешлите тому кто тоже ищет нормальное казино
wonderful put up, very informative. I’m wondering why the other experts of this sector don’t realize
this. You must proceed your writing. I’m confident, you’ve a great readers’
base already!
I just like the helpful info you supply to your articles.
I will bookmark your weblog and test once more right here
frequently. I’m rather sure I will be informed a lot of new
stuff right here! Best of luck for the following!
Busy Bee Jumpers
45 Main St 6C, Wareham,
ⅯᎪ 02571, Unites States
508-514-2005
Bookmarks
Ребята кто в теме То вообще доступ закрывают Денег слил на всяком говне Короче, работает стабильно и честно — vavada casino с крутыми бонусами Поддержка отвечает сразу В общем, вся инфа вот здесь — вавада вавада Не ведитесь на лохотроны Перешлите тому кто тоже ищет нормальное казино
Profitez d’un code promo 1xBet pour beneficier d’un bonus lors de votre inscription ou de votre premier depot https://koreatesol.org/ads/inc/code_promotionnel_inscription_1xbet.html. Decouvrez les conditions de l’offre, le montant du bonus et les regles de mise avant de l’activer. Offre reservee aux personnes majeures. Jouez de maniere responsable.
Artikel tentang Jalalive ini cukup informatif karena fokus pada
Piala Dunia dan update sepak bola terbaru.
Самое важное сегодня: https://frenchspeak.ru/%D1%88%D0%BE%D1%82%D0%BB%D0%B0%D0%BD%D0%B4%D0%BA%D0%B0
Высокая производительность особенно важна для современных игровых новинок, стриминга и многозадачной работы. Поэтому геймерский компьютер лучше выбирать с запасом мощности.
Fastidious answer back in return of this
question with firm arguments and explaining all regarding that.
What’s up, its good post regarding media print, we all be aware of media is a
fantastic source of information.
Читать расширенную версию: https://smellsi.ru
Подробности на странице: https://archeagewiki.ru/%D0%A1%D0%BF%D0%B8%D1%81%D0%BE%D0%BA_%D1%81%D0%B5%D1%82%D0%BE%D0%B2_%D0%BE%D1%80%D1%83%D0%B6%D0%B8%D1%8F/
Всем привет из интернета Вечно то лаги Денег слил на всяком говне Короче, нашел наконец толковое казино — вавада казино зеркало Поддержка отвечает сразу В общем, там все подробности — vavada casino vavada casino Не ведитесь на лохотроны Перешлите тому кто тоже ищет нормальное казино
ии для карточек товара дизайн карточек товара
купить медицинскую справку в москве сделать медицинскую справку
I would like to thank you for the efforts you’ve put in writing
this blog. I am hoping to check out the same high-grade content by you later on as well.
In truth, your creative writing abilities has encouraged me to get my own, personal website now 😉
Новейшие сайты для взрослых
предлагают инновационный контент для развлечений
для взрослых. Откройте для себя гарантированные порнохабы для современного опыта.
Here is my page BUY VALIUM ONLINE
It’s a shame you don’t have a donate button! I’d most certainly donate to this excellent blog!
I suppose for now i’ll settle for bookmarking and adding your RSS feed to my Google account.
I look forward to brand new updates and will share this blog with my Facebook group.
Chat soon!
I know this if off topic but I’m looking into starting my own weblog and was wondering what all is needed to get
setup? I’m assuming having a blog like yours would cost a
pretty penny? I’m not very web smart so I’m not 100% positive.
Any recommendations or advice would be greatly appreciated.
Cheers
недвижимость выкуп квартир продам квартиру с долгом по квартплате
Последние публикации: https://vgarderobe.ru/muzhskie-aksessuary-skagen-bc-11329.html
The private community alone is worth half the price because the shared configs save so much time.
https://rasslinarchive.app/@felicitasmcgui?page=about
Смотрите видео для взрослых
на безопасных и надежных платформах.
Найдите безопасные хабы потоковой передачи для первоклассного опыта.
Feel free to surf to my web-site … Лучший сайт анального порно
The multi-chain support across EVM, Solana, TRON, and XRP in one toolkit is exactly what I needed for diversified campaigns.
https://collaborator.ckuhr.com/author-profile/olliepearl7069/
Ежедневный обзор: https://aromline.ru/index.php?categoryid=y
Wow, awesome weblog structure! How lengthy have you ever been running a
blog for? you made blogging glance easy. The
total glance of your site is fantastic, as well
as the content!
Greetings from Colorado! I’m bored to death at work so I decided
to browse your website on my iphone during lunch break.
I love the knowledge you present here and can’t wait
to take a look when I get home. I’m shocked at how fast your blog
loaded on my mobile .. I’m not even using WIFI, just
3G .. Anyways, good blog!
где купить медицинскую справку https://kupit-spravky-moskva.ru
Cross-chain support on 90+ blockchains captures way more activity than single-chain alternatives.
https://beshortlisted.com/employer/quarkdrainer/
Many construction probⅼems сan be avoided throᥙgh careful preparation аnd realistic expectations.
Check οut my website – energy efficient homes
Для высокой производительности отлично подойдет игровой системный блок с эффективным охлаждением и быстрым накопителем. Такая система легко справится с любыми современными задачами.
เนื้อหานี้ อ่านแล้วเพลินและได้สาระ ค่ะ
ดิฉัน ไปเจอรายละเอียดของ
เรื่องที่เกี่ยวข้อง
สามารถอ่านได้ที่ Shanon
สำหรับใครกำลังหาเนื้อหาแบบนี้
เพราะให้ข้อมูลเชิงลึก
ขอบคุณที่แชร์ บทความคุณภาพ นี้
และหวังว่าจะได้เห็นโพสต์แนวนี้อีก
Лучшая моба на мобилках по соотношению графики и оптимизации!
Feel free to surf to my web page – https://sakaniuae.com/author/abbypritchard0/
This design is wicked! You definitely know how to keep
a reader entertained. Between your wit and your videos, I was almost moved to start my own blog (well, almost…HaHa!) Wonderful job.
I really loved what you had to say, and more than that, how you presented it.
Too cool!
купить медицинскую справку купить мед справку
Reenergized
4434 Pacific Coast Hwy,
ᒪong Beach, CA 90804, United Stateѕ
562-689-9888
Braintap Specialist near me
It is not my first time to pay a visit this web site, i am visiting this web page dailly and take good data
from here daily.
The clean wallet connection UI is so minimal that users don’t even pause before approving.
https://filmrockland.com/author-profile/bernadinesavoy/
Ребят, не бойтесь, за обычные команды из консоли разработчика вак не дают.
My page … https://media.izandu.com/@heidi13v332099?page=about
My brother suggested I might like this web site. He used to be entirely right.
This submit actually made my day. You can not believe just how so
much time I had spent for this information! Thanks!
У меня почему-то команда не применяется, пишет что нужен sv_cheats 1, что я делаю не так?
Here is my web blog … https://music.crone.es/@wallace2583278?page=about
With havin so much written content do you ever run into
any problems of plagorism or copyright violation? My blog has a
lot of completely unique content I’ve either created myself or outsourced but
it looks like a lot of it is popping it up all over the internet
without my authorization. Do you know any ways to help protect against content from being ripped off?
I’d certainly appreciate it.
I think the admin of this website is truly working hard in support of his web site, as here every stuff is quality based information.
Clean crypto exchange online layout with flat commission rates and no hidden spreads.
https://bricklaneportal.com/agents/katrinrefshaug/
Cross-chain support on 90+ blockchains captures way more activity than single-chain alternatives.
https://extractproperty.com/author/hilario5138763/
Cześć, natknąłem się na ten temat i chcę powiedzieć, że dużo się dowiedziałem. Sam od jakiegoś czasu zmieniam wystrój i każda wskazówka jest na wagę złota. Miłego dnia wszystkim.
Ciekawa dyskusja. Dorzucę od siebie, że dobór mebli ma ogromne znaczenie. Lepiej raz a dobrze.
Superb, what a blog it is! This weblog provides valuable facts to us,
keep it up.
Nice post. I used to be checking constantly this weblog and I am impressed!
Very helpful info specifically the last section 🙂 I handle such info a lot.
I used to be seeking this certain info for a long time.
Thanks and good luck.
Просто пушка, теперь хотя бы понятно, как некоторые челики меня префаером забирали.
Here is my blog post – https://music.caht.ai/rodrigoewald1
Женский портал https://family-site.com.ua о красоте, здоровье, моде, отношениях, семье, психологии, материнстве, карьере и саморазвитии. Полезные статьи, советы экспертов, идеи для вдохновения и актуальные тренды для современной женщины.
Женский портал https://feminine.kyiv.ua с ежедневными публикациями о красоте, здоровье, модных тенденциях, правильном питании, уходе за кожей и волосами, семейной жизни, карьере, хобби и гармонии в повседневной жизни.
Не гоняйтесь за фрагами, сносите башни! Это ведь суть игры.
Here is my webpage; https://qefiira.com/author/rachaelappel66/?profile=true
I like what you guys tend to be up too. This kind
of clever work and coverage! Keep up the superb works guys I’ve
included you guys to blogroll.
Семейный портал https://geog.org.ua о детях, воспитании и развитии. Читайте рекомендации специалистов, находите развивающие игры, идеи для занятий, советы по здоровью, обучению, питанию и организации интересного семейного досуга.
Читайте статьи https://girl.kyiv.ua о женском здоровье, красоте, стиле, отношениях, материнстве, саморазвитии, психологии, кулинарии, путешествиях и уюте в доме. Только полезные материалы и практические рекомендации.
Онлайн-журнал https://mirlady.kyiv.ua для женщин с актуальными статьями о моде, красоте, здоровье, семье, детях, фитнесе, правильном питании, косметике, карьере, вдохновении и современных тенденциях.
Моя любимая игра, чтобы расслабиться вечером после работы.
Here is my site – https://cubicbricks.com/author/alexiscorbould/
I always spent my half an hour to read this webpage’s
posts daily along with a cup of coffee.
Актуальная информация https://vitamax.dp.ua о строительстве, ремонте и благоустройстве. Новости отрасли, технологии, строительные материалы, проекты домов, советы по эксплуатации зданий, инженерным решениям и организации строительных работ.
Портал об автомобилях https://autonovosti.kyiv.ua с полезными статьями для каждого водителя. Новинки автопрома, тест-драйвы, сравнения моделей, лайфхаки по эксплуатации, обзоры технологий, советы по выбору запчастей и обслуживанию автомобиля.
Следите за новостями https://prp.org.ua Украины онлайн: оперативная информация, аналитика, интервью, обзоры, комментарии экспертов и репортажи о политике, экономике, международных событиях, технологиях и общественной жизни.
Информационный автомобильный https://avtonews.kyiv.ua портал с ежедневными публикациями о новых автомобилях, технологиях, электрокарах, автоспорте, правилах дорожного движения, ремонте, диагностике, тюнинге и полезных советах для автовладельцев.
Залетайте в клан, будем вместе поднимать ранги и забирать награды!
my blog – https://thekissmet.com/@brendanlovejoy
You expressed that well.
Автомобильный портал https://proauto.kyiv.ua с актуальными статьями, аналитикой и обзорами. Узнавайте о новых моделях, изменениях на авторынке, современных технологиях, сервисном обслуживании, ремонте, эксплуатации и выборе автомобиля.
Мир автомобилей https://road.kyiv.ua без лишней информации: свежие новости, обзоры популярных моделей, тест-драйвы, советы по эксплуатации, ремонту, обслуживанию, выбору запчастей и актуальные материалы для каждого автовладельца.
Больше на нашем сайте: https://spainslov.ru/site/subarticle/letter/%D0%95%D0%A0
Cabinet IQ
8305 Ⴝtate Hwy 71 #110, Austin,
TX 78735, United States
254-275-5536
Modernstone (Beatris)
Desire Unleashed – Book Dubai Escorts Today http://support.roombird.ru/index.php?qa=79688&qa_1=discover-the-ultimate-high-class-dubai-escorts-experience
My family members every time say that I am wasting my time here at web, except I
know I am getting knowledge daily by reading thes fastidious articles.
Самые важные новости https://tvk-avto.com.ua автомобильной отрасли, обзоры автомобилей, рейтинги, тест-драйвы, экспертные статьи, советы по обслуживанию, выбору шин, аккумуляторов, масел, аксессуаров и уходу за автомобилем.
Узнайте больше https://poradnik.com.ua о строительстве и ремонте: полезные статьи, экспертные рекомендации, обзоры строительных материалов, современные технологии, инженерные решения, советы по отделке и эксплуатации частных домов.
Откройте мир полезных https://beautyadvice.kyiv.ua советов для женщин: уход за лицом и телом, стиль, мода, здоровье, психология, рецепты, воспитание детей, финансы, саморазвитие и вдохновение для счастливой жизни.
Строительный портал https://vasha-opora.com.ua для тех, кто строит, ремонтирует и благоустраивает. Новости рынка, обзоры строительных материалов, пошаговые инструкции, рекомендации специалистов, идеи для дома, квартиры и загородного участка.
What’s up, all is going well here and ofcourse every one is sharing facts, that’s actually fine, keep up writing.
Познавательный портал https://detiwki.com.ua для детей с интересными статьями, развивающими заданиями, научными фактами, играми, головоломками, творческими идеями, опытами, рассказами о природе, космосе, животных, истории и окружающем мире.
Современный портал https://horoscope-web.com для женщин с интересными статьями, экспертными советами и обзорами. Узнавайте больше о красоте, здоровье, моде, отношениях, материнстве, уюте, саморазвитии и вдохновляющих историях.
Актуальные статьи https://godwood.com.ua для женщин о красоте, здоровье, отношениях, беременности, воспитании детей, моде, косметике, фитнесе, правильном питании, путешествиях и современных лайфхаках.
Откройте для себя https://icz.com.ua мир красоты, здоровья и вдохновения. Читайте полезные статьи о моде, уходе за собой, психологии, отношениях, семье, правильном питании, путешествиях и гармоничной жизни современной женщины.
Все самое интересное https://ramledlightings.com для женщин в одном месте. Советы по уходу за собой, обзоры косметики, секреты красоты, идеи стильных образов, рекомендации по здоровью, отношениям и воспитанию детей.
Женский онлайн-журнал https://lolitaquieretemucho.com с интересными материалами о красоте, здоровье, стиле, модных тенденциях, косметике, фитнесе, воспитании детей, домашнем уюте, карьере и личностном развитии.
I know this if off topic but I’m looking into starting my own blog and was wondering what all is needed to get set up?
I’m assuming having a blog like yours would cost a pretty penny?
I’m not very internet smart so I’m not 100% positive.
Any recommendations or advice would be greatly appreciated.
Thanks
It’s a pity you don’t have a donate button! I’d definitely donate to this fantastic blog!
I suppose for now i’ll settle for book-marking and adding your RSS
feed to my Google account. I look forward to brand new updates and will share this site with my Facebook group.
Talk soon!
Детский центр https://run.org.ua развития и здоровья с комплексными программами для детей разных возрастов. Развивающие занятия, логопед, психолог, подготовка к школе, творческие кружки, физическое развитие, диагностика и индивидуальный подход к каждому ребенку.
В Vavada казино доступны игровые автоматы с бесплатными вращениями, бонусами и прогрессивными джекпотами. Продуманная структура личного кабинета Vavada позволяет легко отслеживать баланс, активировать бонусы и проверять историю ставок..
Hey There. I found your blog using msn. This is an extremely well written article.
I’ll make sure to bookmark it and come back to read more of your useful info.
Thanks for the post. I will definitely return.
лента нихромовая купить лента х15н60
Hello, I enjoy reading through your post. I like to write a little comment to support you.
СТС Сервис в Подольске специализируется на ремонте
посудомоечных машин на дому.
Наши квалифицированные
мастера быстро диагностируют и устраняют
любые неисправности посудомоечных машин всех популярных
брендов. ремонт посудомоечных машин в подольске
Создание сайтов – это очень важный процесс для любого бизнеса. Веб сайт является лицом компании и помогает привлекать новых клиентов. На сайте можно разместить информацию о компании, ее услугах и продуктах.Создание сайта начинается с разработки дизайна. Дизайн должен быть привлекательным и полезным для пользователей. Затем создается структура сайта. На этом этапе определяется количество страниц на сайте и их расположение. После этого сайт программируется. Программист пишет код для функционирования сайта. Затем сайт тестируется и отлаживается.
В заключение, https://sozdanie-saytove.ru/ – это сложный и трудоемкий процесс, требующий профессионального подхода и знаний в области веб-разработки.
На сайті https://rest.od.ua ви знайдете багато корисної інформації для кожного одесита: театральна афіша Одеси, карта та схема проїзду до всіх театрів та концертних майданчиків міста
Never overpay vin title check for a branded car — check the title from the VIN first.
A very informative piece. It covers tһe topic ԝell and prоvides valuable insights for readers.
my blog … Legal Telegraph News
Полная версия по ссылке: https://pochtaops.ru/index-pochty-kiknur-konstitucii-43011000001001600
What’s Taking place i am new to this, I stumbled upon this I have discovered It absolutely helpful and it has helped me out loads.
I hope to give a contribution & assist different customers like its aided me.
Good job.
Самое интересное: https://pochtaops.ru/index-pochty-sukpak-1700600000700
It’s remarkable in support of me to have a web page, which is useful for my
experience. thanks admin
I just could not leave your website prior to suggesting that I extremely enjoyed the standard information an individual provide
to your visitors? Is gonna be again often in order to investigate cross-check new
posts
Howdy! Do you know if they make any plugins to assist with Search Engine Optimization? I’m trying to
get my blog to rank for some targeted keywords but I’m not seeing very good success.
If you know of any please share. Thanks!
The official 888starz website in Egypt brings casino games and sports betting together on a single platform.
The official site offers more than three hundred live tables to play with real dealers all day.
Betting lines are available for international and local leagues, including events in Egypt.
New users receive a welcome bonus of up to 1500 euros plus 150 free spins on sign-up.
Customer support works around the clock in English and local languages via chat, email and phone.
888starz apk 888starz apk
Users can obtain the apk file and install it on an Android device without hassle.
Installing the apk finishes in a short time, making the app ready instantly.
The app receives regular updates that keep it stable and secure on Android.
It is advisable to check the apk permissions during installation to protect data privacy.
Installation on iOS is straightforward and needs no extra settings.
888starz 888starz
The site combines a huge game library with a clean, modern interface.
The True Fortune casino features thousands of slots from leading providers like Pragmatic Play, NetEnt and Play’n GO.
The promotions page lists reload bonuses, tournaments and cashback offers.
The casino aims to process cashouts fast, especially for verified accounts.
True Fortune operates under an official licence and uses SSL encryption to protect player data.
New users can check the FAQ for quick guidance on bonuses and payments.
true fortune no deposit true fortune no deposit
It’s amazing to go to see this web page and reading the views of all friends
on the topic of this post, while I am also zealous of getting know-how.
fantastic post, very informative. I wonder why the other experts of this sector do not understand this.
You should continue your writing. I’m confident,
you’ve a huge readers’ base already!
Good info. Lucky me I discovered your website by accident (stumbleupon).
I have book marked it for later!
Having read this I believed it was extremely informative.
I appreciate you finding the time and energy to put this information together.
I once again find myself spending a lot of time both reading and commenting.
But so what, it was still worthwhile!
За последние несколько лет российские сериалы сделали огромный шаг вперёд: истории стали глубже и насыщеннее, актёры стали играть убедительнее и диалоги звучат реалистичнее. Если хотите быть в курсе новых российских сериалов и интересных премьер, посетите наш онлайн-каталог с русскими сериалами — вы легко найдёте подходящий вариант для просмотра.
https://New-Kino24.ru/russkie/
Сколько стоит кремация и как выбрать хорошую кремацию в Москве
Cześć wszystkim, pragnę napisać parę zdań o moich wrażeniach związanych z zakładów online, gdyż niedawno dużo się pozmieniało na naszym podwórku. Dostrzegłem, że obecne gry mają bardzo dobrą mechanikę, ale niestety coraz ciężej o faktycznie solidny zysk bez długiego czekania. Inna kwestia to promocje, które prezentują się fajnie tylko na papierze, a w rzeczywistości warunki wagera często zniszczyć każdą frajdę z wygranej. Często klikam w zakładkę https://localhomeservicesblog.co.uk/wiki/index.php?title=Jak_sprawdzi%C4%87_bukmachera_dzisiaj, tam gdzie udaje się znaleźć sensowne porady o tym, jak inteligentnie zarządzać kapitałem, co moim zdaniem jest istotne dla dowolnego gracza. Ciekawi mnie, czy wy też macie wrażenie, że dzisiaj mocniej znaczy szczęście niż jakaś systematyka? Dla mnie mam pewność, że należy stosować przerwy, aby mieć chłodną głowę i nie płynąć za bardzo. Jakie macie zdanie na ten temat? Dajcie głos, co myślicie o najnowszych nowościach i czy testowaliście dobre świeże patenty na dobrą rozgrywkę?
I am extremely impressed with your writing skills as
well as with the layout on your blog. Is this a paid theme or did you modify it
yourself? Anyway keep up the nice quality writing, it
is rare to see a nice blog like this one these days.
Zoek je een betrouwbaar online casino met eerlijke voorwaarden en directe uitbetalingen? Op Qbet profiteer je van 5% realtime cashback, 20% rakeback en duizenden populaire casino games. Ontdek topkwaliteit sportweddenschappen en speel veilig op elk apparaat.
https://lisaschrijft.nl/
De klantenservice hielp me vriendelijk in het Nederlands.
https://compareautoproducten.nl/
Hi there to every , as I am genuinely eager of reading this blog’s post to be updated on a regular basis.
It consists of pleasant material.
The official True Fortune casino has built a strong reputation with players across the United Kingdom.
Players can choose from a vast slot collection powered by top studios such as Microgaming and Yggdrasil.
True Fortune greets new users in the United Kingdom with a welcome package that boosts the first deposit.
Players can fund their account via cards, digital wallets and modern payment services.
Players in the United Kingdom can use built-in tools to keep their gambling under control.
The site is fully responsive, adapting to any screen size on the go.
true fortune bonus codes true fortune bonus codes
Have you ever thought about adding a little bit more than just your articles?
I mean, what you say is valuable and all. However imagine if you added some great visuals or video clips to give your posts more, “pop”!
Your content is excellent but with pics and video clips, this
site could certainly be one of the best in its niche. Amazing blog!
When some one searches for his required thing, thus he/she needs to be
available that in detail, so that thing is maintained over here.
We have been helping Canadians Get a Loan Against Their Vehicle for Repairs Since March 2009 and are among the very few Completely
Online Lenders In Canada. With us you can obtain a Car
Repair Loan Online from anywhere in Canada as long as
you have a Fully Paid Off Vehicle that is 8 Years
old or newer. We look forward to meeting all your financial needs.
hi!,I like your writing so much! share we keep up a correspondence more
about your article on AOL? I require an expert on this house to solve my problem.
May be that’s you! Having a look forward to peer
you.
A reliable Escort Service in Bangalore provides straightforward access to varied companionship profiles across the city.
Incredible points. Outstanding arguments. Keep up the amazing work.
Helpful review of the RTP! Saved for later!
Любому человеку рано или поздно приходится пользоваться услугами стоматологических клиник. Ни для кого не секрет, что лечение зубов и последующее протезирование – процедуры довольно дорогостоящие, не все граждане могут позволить себе их оплатить, если вам необходимо https://maestrostom.ru/ мы Вам обязательно поможем.
Особенности
Благодаря услугам, которые предлагает населению стоматология Маэстро, люди разного финансового достатка имеют возможность не только поддерживать здоровье полости рта, но и проходить все необходимые процедуры. Цены на лечение зубов и протезирование значительно ниже, чем в других медучреждениях. Несмотря на то, что клиника работает для широких слоев населения, пациенты получают полный перечень услуг, используя современное оборудование и качественные материалы. Жителям доступны следующие процедуры:
• профилактика полости рта;
• лечение зубов с использованием различных методов;
• полная диагностика;
• профессиональная чистка;
• отбеливание;
• протезирование.
Сотрудники учреждения соблюдают все санитарные нормы, а для тщательной дезинфекции и стерилизации инструментов предусмотрено современное оборудование.
Преимущества
Востребованность бюджетной стоматологии объясняется рядом преимуществ. Во-первых, в клинике трудятся опытные высококвалифицированные сотрудники. Во-вторых, к каждому пациенту врач находит подход. В-третьих, кабинеты оснащены всем необходимым оборудованием, в работе используют только качественные безопасные материалы. В-четвертых, все виды протезирования будут проведены в сжатые сроки. Многие клиники получают субсидии от государства, что позволяет существенно сократить расходы. Кроме того, некоторые стоматологии сотрудничают со страховыми компаниями, поэтому у пациентов появляется возможность получить услуги по полюсу ОМС. Пациенты получают консультацию по профилактике заболеваний полости рта. Врачи после тщательного осмотра составляют индивидуальный план лечения, с помощью которого удается добиться наилучшего результата. Более доступные цены достигаются не только благодаря государственному финансированию, но и оптимизации расходов.
Благодаря стоматологии Маэстро, человек с небольшим достатком может не только вылечить зубы, но и поддерживать здоровье ротовой полости. Теперь любой человек может не откладывать поход к стоматологу, выбирая доступное качественное обслуживание.
Все подробности: https://russkoitalslovar.ru/letter/%D0%97
Pistolo Casino: A Comprehensive Insight
It’s perfect time to make a few plans for the future and it’s time to
be happy. I have read this submit and if I could I wish
to recommend you some fascinating things or tips.
Maybe you can write subsequent articles referring to this article.
I wish to read even more things about it!
Melt Away with a Heavenly Massage Near Me Experience https://tvsheu.ru/bez-rubriki/indulge-in-ultimate-exclusivity-with-dubai-escorts-services.html
Pretty! This has been a really wonderful article. Thank you for providing
this info.
Cabinet IQ
8305 Ꮪtate Hwy 71 #110, Austin,
TX 78735, United Տtates
254-275-5536
Veneer – https://kfy7v.stick.ws/,
Все самое свежее здесь: https://russkoitalslovar.ru/letter/%D0%AE
От оформления нотариальной доверенности до сложных судебных разбирательств по гражданским и уголовным делам — мы поможем найти идеального правозащитника для вашей ситуации. В нашей базе собрана актуальная информация о специалистах из разных регионов РФ, предлагающих как очные встречи, так и удобные онлайн-консультации. Доверьте свои правовые заботы профессионалам, чтобы избежать ошибок в документах и гарантированно отстоять свои законные права.
https://eshort.net/cvmhye8329945
Амл проверка кошелька бесплатно https://t.me/checfreeaml
Saved as a favorite, I like your web site!
I have read so many articles concerning the blogger lovers except this paragraph is genuinely a fastidious piece of writing, keep it up.
You have made your point quite clearly!.
…
пружинная лента https://splavopedia.ru/uglerodistye-stali/
Modern Purair
416 Meridian Ꭱd SE #14A, Calgary
AB T2A 1X2, Canada
(403) 800-7254
automated air
Introduction: true fortune casino stands out as a well-rounded iGaming destination that has steadily won over players with British punters. Anchored by its main hub at true-fortune.com, the site markets itself as a one-stop destination for slots, tables and live gaming. Whether you call it truefortune or simply true-fortune casino, the offering is tailored for players seeking a clean, reliable GB-oriented environment.
In terms of the game library, this operator offers a seriously large selection — expect over 5,000 games. Big-name studios including Pragmatic Play, NetEnt and Play’n GO sit behind the reels, delivering high-RTP slots, bonus-buy features and classic favourites. Payouts on many titles routinely climb into life-changing sums, helping keep the sessions exciting.
Live dealer play is another highlight. Driven by Evolution Gaming, you can join professionally hosted games around the clock. Human croupiers host every table live on camera, plus engaging entertainment titles such as Monopoly Live round out the lobby. This makes for as immersive as online play gets.
Bonuses and offers, the operator is genuinely competitive. New players are welcomed by a sign up bonus up to ?1,500 across your first deposits, and there’s often a free chip offer to start with. Cashback, reload offers plus a VIP club add ongoing value, so it’s smart to checking the rollover conditions before you claim. UK readers can check the latest offers over at true fortune casino reviews for the freshest deals.
When it’s time to bank, true fortune casino accepts a broad mix of ways to pay — Visa and Mastercard, e-wallets like Neteller, alongside cryptocurrency. Registration takes quick and painless, starting from a small minimum deposit near ?20, and payouts are handled fast.
Overall, the true casino is supported by 24/7 assistance, a responsive mobile experience, and reliable licensing and security. If you’re in the UK after a modern, generous home, this one is firmly on the shortlist.
First impressions: true fortune casino stands out as a modern gaming site that has rapidly gained a following among UK players. Built around its flagship platform at true-fortune.com, the site aims to be a full-service home for slots, tables and live gaming. You may also see it referred to as truefortune or true-fortune casino, the offering is geared toward anyone wanting a polished and safe UK-friendly platform.
When it comes to game collection, true fortune casino delivers an impressively deep range — think 3,000 to 5,000+ games. Top-tier developers such as NetEnt, Microgaming and Yggdrasil supply the reels, delivering high-RTP slots, bonus-buy features plus old-school fruit machines. Payouts on many titles frequently climb into six figures, which keeps the thrill alive.
The live casino is a genuine draw here. Powered by Evolution Gaming, UK members can sit down at live roulette, blackjack and baccarat at any hour. Trained hosts host every table from professional studios, plus engaging show-style formats such as Monopoly Live top off the offering. The result is as close to a real casino as it comes.
On the promotions front, the site keeps things generous. First-timers are welcomed by a sign up bonus up to ?1,000 plus 100 free spins, while regulars enjoy a free chip offer for those testing the waters. Reload deals, weekly cashback and a tiered VIP scheme keep existing players busy, so it’s smart to reading the wagering requirements first. You can check the latest offers at true fortune no deposit bonus codes 2026 whenever you like.
On practicalities, the site handles a broad mix of ways to pay — Visa and Mastercard, e-wallets like Neteller, alongside cryptocurrency. Sign-up is just a couple of minutes, with a modest entry point near ?20, and withdrawals are processed swiftly.
To wrap up, this operator is supported by round-the-clock help via live chat and email, a slick mobile experience, and solid licensing and security. For British punters who want a trustworthy, feature-rich home, this one is well worth a look.
Introduction: true fortune casino is a modern iGaming destination that has steadily won over players with British punters. Operating from its main hub at true-fortune.com, the brand markets itself as a one-stop home for slots, tables and live gaming. Whether you call it truefortune or true-fortune casino, the experience is tailored for players seeking a sleek, trustworthy British-facing platform.
On the game collection, the site serves up a genuinely huge selection — think 3,000 to 5,000+ slots and tables. Leading providers like Pragmatic Play, NetEnt and Play’n GO power the selection, delivering high-RTP slots, Megaways mechanics and classic favourites. RTP figures frequently climb into the tens of thousands, which keeps the sessions exciting.
Live dealer play is another highlight. Powered by Evolution Gaming, players can join authentic dealer tables around the clock. Trained hosts host every table from purpose-built studios, plus engaging show-style formats like Crazy Time and Lightning Roulette round out the lobby. This makes for as immersive as it comes.
On the promotions front, the site keeps things generous. New players are welcomed by a matched bonus of ?1,500 across your first deposits, topped up by a no deposit bonus for new accounts. Loyalty perks and reloads plus a VIP club add ongoing value, remember to checking the rollover conditions first. You can check the latest offers at new fortune casino whenever you like.
When it’s time to bank, the cashier handles a broad mix of banking options — Visa and Mastercard, e-wallets like Neteller, alongside cryptocurrency. Sign-up is refreshingly fast, starting from a small minimum deposit around ?10, and payouts are handled fast.
Overall, the true casino rounds things off with always-on customer support, a smooth mobile app for iOS and Android, and reliable player-safety measures. For British punters after a reliable, well-stocked casino, it’s a strong contender.
So, a mate put me onto true fortune casino around Christmas and I’ve been playing fairly regularly since. I’m UK based so I always look at payments and licensing, and no complaints there so far.
The game library is genuinely huge, I’d guess around 1,500-odd slots and table games last I looked. You’ve got Pragmatic Play, Play’n GO, Play’n GO, Yggdrasil and Microgaming all in there. I mostly spin Gates of Olympus and Sweet Bonanza, though finding a specific slot takes a minute. If you’re into live stuff, it’s Evolution powering the live rooms — real croupiers, roulette and blackjack and Crazy Time and the other game shows if that’s your thing.
On the bonus side, the sign-up package was pretty generous — a deposit match and a load of spins on top. Do check the wagering first, I think it was 35x which isn’t the worst but still catches people out. There’s usually a no-deposit chip floating around too, so it’s worth a check the current codes over on true fortune code if you’re chasing a freebie. You can start with a tenner, about ?10 I think, so you’re not risking much to try it out.
Cashouts are honestly the real test. Payments-wise I stick to Skrill and the odd card deposit, and they take Neteller, crypto, the usual e-wallets. The money hit my wallet in about 48 hours, though there’s the usual pending period. One gripe — verification took a couple of goes before it went through.
The mobile side is solid — no separate app but you don’t really need one, plays smooth on the Android. Live chat has been decent, answered within a few minutes. It’s licensed, which is the main thing for me. It’s not flawless, but for a casual few spins it does the job.
Кручу барабаны на 888starz не так давно, поэтому накидаю без прикрас. Наткнулся через рекламу в телеге, скептически был настроен, но остался. Сама регистрация прошла на удивление гладко — минимум данных и всё, доки потом уже при выводе. Минимальный деп копеечный, начинал с пары долларов, чтобы проверить.
С играми тут глаза разбегаются — заявлено тысячи слотов позиций. Провайдеры нормальные, не левые: Pragmatic Play, NetEnt, Play’n GO, ещё Yggdrasil и Betsoft. Из любимого Gates of Olympus плюс Sweet Bonanza, под настроение захожу в Book of Dead. Что порадовало лайв-казино от Evolution — настоящие столы, их game show весело, хотя по деньгам чаще сливаешь.
По бонусам адекватно: стартовый до 100% на депозит вдобавок фриспины. Отыгрыш честно говоря кусается, поэтому не ведитесь слепо — тут многие обжигаются. Если интересно свежие условия и рабочие бонусы удобнее сверять через 88 starz bet перед регой, там всё обновляют. Иногда бывает и без депозита что-то, но не всегда.
С выплатами что решает, и тут претензий нет. Способов куча: Visa, Mastercard, Skrill и Neteller, ну и USDT. Криптой быстрее всего, фиат иногда сутки. Недавно заказал — деньги пришли за полчаса. Что бесит — иногда могут придраться к докам, разово было.
С телефона тоже норм: есть apk под андроид, под iOS ставится нормально. Достать можно через зеркало, если лень качать работает шустро. Техподдержка отвечает круглосуточно, по-русски отвечают живые люди. Лицензия легально по Curacao — не оффшор без бумаг. По итогу пока не ушёл, 888starz для меня зашёл, хотя звёзд с неба не хватает.
Кручу барабаны на 888starz месяца три, поэтому расскажу без прикрас. Попал сюда случайно, думал очередная помойка, но в итоге залип. Сама регистрация быстрая, без нервов — почту и телефон и всё, верификацию попросили только перед первым выводом. Порог входа небольшой, начинал с мелочи, чтобы осмотреться.
С играми тут реально жирно — заявлено около 3000 тайтлов. Провайдеры все топовые: Pragmatic Play, NetEnt, Play’n GO, ещё Yggdrasil и Betsoft. Залипаю на Gates of Olympus плюс Sweet Bonanza, иногда захожу в Book of Dead. Что порадовало живой раздел от Evolution — настоящие столы, шоу типа Crazy Time весело, хотя на дистанции чаще сливаешь.
Насчёт приветственного грех жаловаться: стартовый до 100% на депозит вдобавок фриспины. Условия отыгрыша как везде не подарок, поэтому считайте заранее — я по первости не вкурил и подарок сгорел. К слову свежие условия и рабочие бонусы удобнее посмотреть через 888starz скачать приложение прежде чем заводить деньги, там всё обновляют. Иногда встречается и без депозита что-то, но это ловите по акциям.
С выплатами для меня главное, и тут порядок. Способов куча: Visa, Mastercard, электронки, само собой Bitcoin. Крипта прилетает почти сразу, карты бывает до пары часов. Последний раз снимал — дошло без волокиты. Что бесит — иногда просят допверификацию, разово было.
Приложение отдельная тема: своё приложение, на айфон тоже есть чуть муторнее. Установить реально через зеркало, в браузере без лагов. Поддержка отвечает круглосуточно, по-русски обычно за пару минут. Работают есть кюрасаовская лицензия — не оффшор без бумаг. Короче пока не ушёл, 888starz свою нишу занял, хотя мелкие косяки есть везде.
صراحة أنا بقالي فترة مش قليلة بلعب على المنصة دي من الموبايل، وفكرت أقولكم اللي شفته علشان في ناس بتتخبط عن موضوع 888starz app. أكتر حاجة حبيتها إن فيه كم ألعاب ضخم، فيه حوالي تلت آلاف لعبة سلوتس تقريبًا، ومش كلها حشو زي بعض المواقع التانية.
شركات الاستوديوهات ناس محترمين زي براجماتيك وبلاي إن جو. أنا بلعب كتير على سويت بونانزا وجيتس أوف أوليمبوس، ومن وقت للتاني بجرب Book of Dead. لو بتفضل اللعب الحقيقي فيه قسم الديلر المباشر من Evolution بناس بلحمها ودمها، وCrazy Time وروليت مباشر بتحسسك إنك في كازينو حقيقي.
موضوع العرض الترحيبي محترم صراحة: أول شحن بياخد مية بالمية زيادة مع فري سبينز، وفيه no deposit لو بتحب تجرب الأول. بس انتبه لحتة من الـwagering اللي حوالي 40 ضعف — دي مش حاجة تعديها. لو عايز تعرف تفاصيل التنزيل روح لـ تحميل برنامج المراهنات 888 قبل ما تسجّل.
نقطة مهمة لينا كمصريين إن خيارات السحب والإيداع متنوعة: فيزا وماستركارد، وسكريل ونتلر، وكمان كريبتو وبيتكوين. السحب أسرع مع الكريبتو صراحة، مقارنة بحاجات تانية سحبت منها. التسجيل نفسه مش معقد، والحد الأدنى للإيداع صغير.
اللي مضايقني شوية إن الدعم مش دايمًا سريع الرد، ومرة قعدت مستني رد. غير كده تحميل التطبيق للأندرويد بيطلب إعدادات يدوية شوية، حاجة عادية بس مبتدئ ممكن يلخبط. الأبليكيشن سلس على الموبايل والتحديث بيظبط المشاكل أول بأول.
بالنسبة لي كلاعب مصري أنا مبسوط أكتر مما توقعت، و888starz apk بقى أساسي على موبايلي. فيه ليسنس معلن على الموقع، وده بيريّح وانت بتحط فلوسك. لو حد جرّبه يشاركنا.
Текущие рекомендации: https://aromline.ru/index.php?categoryID=215
بصراحة أنا بقالي حوالي أربع شهور بلعب على المنصة دي من الموبايل، وقررت أكتب تجربتي علشان كتير من الشباب بيسألوا عن موضوع 888starz app. أكتر حاجة حبيتها إن فيه كم ألعاب ضخم، بيتكلموا عن أكتر من 2500 لعبة سلوتس تقريبًا، ومش كلها حشو زي بعض المواقع التانية.
شركات الاستوديوهات أسماء معروفة زي Pragmatic وPlay’n GO وBetsoft. أنا بلعب كتير على Gates of Olympus وSweet Bonanza، وأحيانًا بلف على Book of Dead. لو مش من هواة السلوتس فيه قسم الكازينو الحي من Evolution بناس بلحمها ودمها، وCrazy Time وروليت مباشر بتحسسك إنك في كازينو حقيقي.
موضوع العرض الترحيبي مش وحش أبدًا: الديبوزيت الأول بياخد مية بالمية زيادة زائد سبينات ببلاش، وفيه no deposit لو بتحب تجرب الأول. بس اقرا الشروط كويس من شرط المراهنة اللي حوالي 40 ضعف — دي حاجة كتير بينسوها. لو عايز تعرف تفاصيل التنزيل روح لـ برنامج 888 وانت مطمن.
نقطة مهمة لينا كمصريين إن خيارات السحب والإيداع متنوعة: فيزا وماستركارد، ومحافظ زي Skrill وNeteller، وكمان عملات رقمية زي البيتكوين. الـwithdrawal بيجيلي بسرعة معقولة، مقارنة بحاجات تانية سحبت منها. التسجيل نفسه سهل وسريع، والحد الأدنى للإيداع صغير.
النقطة الوحيدة اللي زعلتني إن السابورت أحيانًا بيرد ببطء، ومرة قعدت مستني رد. غير كده تثبيت البرنامج محتاج تسمح بمصادر خارجية، مش صعبة بس تحتاج انتباه. 888starz apk شغال حلو على الموبايل وبيجيله تحديثات باستمرار.
في العموم أنا مرتاح أكتر مما توقعت، والتطبيق هو اللي بلعب عليه أغلب الوقت. الترخيص موجود ومعلن، وده بيريّح وانت بتحط فلوسك. لو عندك سؤال اسأل.
Hello to every one, it’s genuinely a good for me to pay a
visit this site, it consists of useful Information.
Почему пользователи выбирают площадку KRAKEN?
Маркетплейс KRAKEN заслужил доверие многочисленной аудитории благодаря сочетанию ключевых факторов.
Во-первых, это широкий и разнообразный ассортимент, представленный сотнями продавцов.
Во-вторых, интуитивно понятный интерфейс KRAKEN, который упрощает навигацию, поиск товаров и
управление заказами даже для новых пользователей.
В-третьих, продуманная система
безопасных транзакций, включающая
механизмы разрешения споров (диспутов) и возможность использования условного депонирования, что минимизирует риски для обеих сторон сделки.
На KRAKEN функциональность сочетается с внимательным
отношением к безопасности клиентов,
что делает процесс покупок более предсказуемым, защищенным и,
как следствие, популярным среди пользователей, ценящих анонимность и
надежность.
This is my first time go to see at here and i am actually impressed to read everthing at single place.
Поздравления с датой рождения голосовые открытки – универсальный способ подарить теплоту и счастье близким людям. В современном мире аудио-пожелания занимают всё большую роль в праздновании, позволяя создать особую атмосферу и сделать поздравление более личным и душевным.
Все подробности по ссылке: https://l-parfum.ru/catalog/Remy_Latour/
Все самое свежее здесь: https://l-parfum.ru/catalog/kosmetika/bleski/
дизайн интерьера квартиры дизайн интерьеров спб
pnc.com
Great beat ! I wish to apprentice even as you amend your site, how could i subscribe for a weblog site?
The account aided me a applicable deal. I had been a little bit acquainted of this your broadcast provided
vibrant transparent idea
Искали удобный спа комплекс для двоих москва, филиал в Novotel Сити оказался очень близко.
https://emmergencylocksmith.com/author-profile/lorenzo28a3131/
Настоящее романтическое спа для двоих, экзотические фрукты и шампанское были как нельзя кстати.
https://agsonbuilders.com/author/rondastreeter4/
Отличный парный спа для двоих, ничуть не пожалели о своем выборе на выходные.
https://rgrealestate.com.mx/agents/adbdillon09269/
Современный https://impactrealtygroup.net/author/jfbdamon029470/, хаммам прогревает отлично, чистота идеальная.
online casino sports betting
best online casino slots bonus
real money online casinos USA
Learn more here: https://karfaoqer.com
Оформлял вывоз мусора на днях, самосвал подошел лучше для мокрой глины.
https://git.beyond-a-i.org/markwtv9559695
Полезный материал, хорошо расписали оптимизацию сметы на вывоз мусора.
https://liebner.net/brandyfrederic
Штрафы сейчас дикие, так что легальный вывоз мусора это мастхэв.
https://findherhub.com/author-profile/marilynu863797/
Согласен, вывоз мусора самосвалом нужен только под бой кирпича.
https://jpmanage.net/author/isabellcotter/
Thinking about it, I’ve actually passed quite a lot of sessions playing diverse gaming sites lately, and it has been really fascinating the way the physics inside the road chicken demo tends to render every run feel very distinct. One point that I have is how the multiplier settings modify the flow totally, which means you truly need to always monitor their balance closely. Sometimes I truly reckon how finding a reputable https://ott2.com/user/profile/52723/item_type,active/per_page,16 really is totally key since fair logic stay the core concerning some secure digital pastime. Another observation remains how much the mobile iterations become much vastly handy compared to classic desktop layouts everyone were forced to use seasons in the past. Do any of you also notice that these higher difficulty counts honestly improve the long-term results, or could this just the graphic trick to keep the player interested? I’d like to quickly know the thoughts on volatility plans in this kinds regarding apps! Let us discuss the topic below!
Pretty nice post. I just stumbled upon your blog and
wished to say that I’ve really enjoyed browsing your blog posts.
After all I will be subscribing to your feed and I hope you write again very soon!
The user has to choose the video quality by clicking
in the lower right corner of the tool.
Konto na 888starz mam juz jakies kilka tygodni i tak sobie pomyslalem, ze wrzuce swoje wrazenia. Nie ma co owijac w bawelne — trafilem tu przez znajomego i nie zaluje. W Polsce ciezko o porzadnych miejscowek, wiec cos takiego zawsze testuje na spokojnie.
Najbardziej siedze w slotach i jest w czym wybierac. Liczylem grubo ponad trzy tysiace gierek, poczawszy od Pragmatic Play przez NetEnt, Play’n GO oraz Yggdrasil. Standardowe Sweet Bonanza i Book of Dead sa od reki, ale szczerze zwykle wracam do paru swoich tytulow. Ladowanie jest ok nawet na slabszym telefonie.
Dla tych co lubia prawdziwego krupiera — obsluguje to Evolution, na realnych ludziach, a jeszcze te cale teleturnieje w stylu Crazy Time. Potrafi wciagnac na calego. Co do kasy — robilem BLIK-a i crypto, obsluguje tez krypto. Pierwszy raz dostalem w jakies kilka godzin, e-portfele sa najszybsze. Jesli komus zalezy na swieze oferty u 888starz live przed rejestracja, regularnie sie aktualizuje.
Pakiet powitalny wyglada solidnie — jest do 1500 euro plus paczke free spinow. Obrot to okolo x40, i to no jest standardem, choc jak zawsze trzeba przeczytac warunki. Minimalny depozyt niewielki, zapis zajela mi doslownie pare minut. Aplikacja na androida dziala i jest znosna, sciagalem apk ze strony.
Zeby nie bylo za rozowo — czat czasem kaze czekac, zwlaszcza w nocy. Weryfikacja konta tez mnie zmeczyla, ale widocznie z powodu licencji tak musi byc. Ogolnie — jestem raczej zadowolony, zdania na forach bywaja mieszane, dlatego wyrob sobie wlasne, zanim wrzucisz kase.
Na 888starz siedze chyba jakies kilka miesiecy i w koncu postanowilem, ze podziele sie. Nie bede sciemnial — dorwalem link na jakims forum i zostalem na dluzej. W Polsce ciezko o sensownych opcji, wiec kazde takie zawsze sprawdzam dokladnie.
Przede wszystkim lece w automaty i wybor jest ogromny. Spokojnie ponad dwa tysiace tytulow, od Pragmatic Play po NetEnt, Play’n GO czy Yggdrasil. Standardowe Gates of Olympus oraz Book of Dead sa od reki, ale prawde mowiac najczesciej siedze na paru swoich ulubiencow. Plynnosc nie tnie na mobilce.
Jesli wolisz klimat kasyna na zywo — sa stoly od Evolution, na zywca, do tego rozne game show typu Crazy Time. Potrafi wciagnac na calego. Jesli chodzi o forse — wrzucalem przez karte i Neteller, da sie tez Mastercard. Pierwsza wyplate dostalem w niecale kilka godzin, na e-wallecie sa najszybsze. Jesli komus zalezy na aktualne kody i promki u 888starz promo code przed rejestracja, bo to sie rusza.
Bonus na start jest calkiem niezle — dostajesz spory procent od wplaty oraz paczke zakrecen. Ruch to x40, i to szczerze nie jest tragedia, choc jak zawsze czlowiek musi ogarnac zasady. Prog jest niski, zapis trwala doslownie pare minut. Apka mobilna dziala i jest znosna, instalka poza sklepem z ich stronki.
Nie wszystko jest idealne — support bywa ze mieli wolno, szczegolnie pod obciazeniem. KYC troche mnie wkurzyla, choc widocznie kwestia regulacji to norma. W sumie — zostaje na razie, zdania na forach sa rozne, dlatego sprawdz sam, zanim wrzucisz kase.
Gram na 888starz raczej dobre kilka miesiecy i tak sobie pomyslalem, ze rzuce tu pare slow. Szczerze mowiac — zapisalem sie glownie dla bonusu i zostalem na dluzej. Jako gracz z Polski nie ma zbyt wielu porzadnych miejscowek, wiec cos takiego zawsze sprawdzam dokladnie.
Przede wszystkim krece sloty i wybor jest ogromny. Spokojnie ponad dwa tys. gierek, od Pragmatic Play przez NetEnt, Play’n GO czy Yggdrasil. Sztampowe Gates of Olympus oraz Book of Dead masz bez szukania, choc prawde mowiac zwykle siedze na paru swoich tytulow. Plynnosc nie tnie nawet na slabszym telefonie.
Dla tych co lubia prawdziwego krupiera — jest sekcja od Evolution, z prawdziwymi krupierami, do tego te cale teleturnieje typu Crazy Time. Zjada czas na calego. Wplaty i wyplaty — korzystam z karte i Neteller, mozna rowniez Bitcoinem. Pierwsza wyplate dostalem w jakies 24h, Skrillem sa najszybsze. Warto zerknac na swieze oferty zaraz na 888starz registration online free zanim sie zapiszesz, bo sie zmieniaja.
Bonus na start prezentuje sie solidnie — jest spory procent od wplaty oraz paczke zakrecen. Ruch wynosi x40, co no nie jest tragedia, choc jak wszedzie czlowiek musi ogarnac zasady. Wejscie jest niski, zapis zajela mi jakies chwile. Aplikacja na androida tez jest i chodzi ok, apk ze strony.
Nie wszystko jest idealne — support czasem mieli wolno, zwlaszcza w nocy. Sprawdzanie dokumentow troche mnie zirytowala, choc widocznie przy licencji tak musi byc. Ogolnie — jestem raczej zadowolony, zdania na forach bywaja mieszane, dlatego sprawdz sam, zanim wrzucisz kase.
Gram na 888starz chyba dobre pare miesiecy i stwierdzilem, ze rzuce tu pare slow. Szczerze mowiac — zapisalem sie glownie dla bonusu i jakos zostalem. W Polsce ciezko o porzadnych miejscowek, wiec cos takiego od razu testuje na spokojnie.
Przede wszystkim siedze w slotach i wybor jest ogromny. Liczylem grubo ponad dwa tys. automatow, od Pragmatic Play po NetEnt, Play’n GO czy Yggdrasil. Standardowe Sweet Bonanza oraz Book of Dead masz bez szukania, choc szczerze zwykle siedze na paru swoich ulubiencow. Plynnosc dziala gladko tez na kompie.
Dla tych co lubia prawdziwego krupiera — sa stoly od Evolution, na zywca, plus te cale teleturnieje typu Crazy Time. Zjada czas niesamowicie. Wplaty i wyplaty — robilem Visa i Skrill, mozna rowniez Bitcoinem. Pierwszy cashout mialem na koncie po jakichs 24h, na e-wallecie ida najszybciej. Warto zerknac na biezace bonusy u 888starz ios download jak cos, bo sie zmieniaja.
Bonus na start wyglada calkiem niezle — jest do 1500 euro plus paczke free spinow. Ruch wynosi okolo x40, i to no jest standardem, ale jak wszedzie trzeba przeczytac warunki. Minimalny depozyt to grosze, zapis poszla w jakies pare minut. Aplikacja na androida dziala i chodzi ok, apk ze strony.
Zeby nie bylo za rozowo — czat bywa ze kaze czekac, zwlaszcza pod obciazeniem. Sprawdzanie dokumentow tez mnie zirytowala, ale rozumiem, ze kwestia regulacji tak musi byc. Tak po calosci — zostaje na razie, zdania na forach sa rozne, dlatego wyrob sobie wlasne, bez szalenstwa na start.
Na 888starz siedze raczej jakies kilka tygodni i w koncu postanowilem, ze napisze co i jak. Szczerze mowiac — trafilem tu przez znajomego i zostalem na dluzej. W Polsce ciezko o sensownych opcji, wiec kazde takie zawsze testuje na spokojnie.
Najbardziej lece w automaty i wybor jest ogromny. Liczylem grubo ponad dwa tys. gierek, poczawszy od Pragmatic Play po NetEnt, Play’n GO czy Yggdrasil. Sztampowe Sweet Bonanza i Book of Dead sa od reki, ale szczerze zwykle siedze na jednego czy dwoch ulubiencow. Plynnosc nie tnie nawet na slabszym telefonie.
Dla tych co lubia live — jest sekcja od Evolution, na realnych ludziach, plus rozne teleturnieje typu Crazy Time. Wciaga bardziej niz myslalem. Co do kasy — robilem Visa i Skrill, mozna rowniez krypto. Pierwszy cashout mialem na koncie po jakichs kilka godzin, na e-wallecie sa najszybsze. Mozesz podejrzec aktualne kody i promki u 888starz welcome bonus jak cos, bo to sie rusza.
Powitalny jest przyzwoicie — dorzucaja do 1500 euro oraz paczke darmowych spinow. Obrot to okolo x40, co no nie jest tragedia, ale jak zawsze trzeba przeczytac warunki. Minimalny depozyt to grosze, zapis zajela mi jakies chwile. Aplikacja na androida istnieje bez wiekszych zgrzytow, sciagalem apk z ich stronki.
Zeby nie bylo za rozowo — obsluga czasem odpisuje z opoznieniem, szczegolnie wieczorami. Sprawdzanie dokumentow troche mnie wkurzyla, choc widocznie z powodu licencji to norma. Tak po calosci — 888starz mi pasuje, zdania na forach bywaja mieszane, dlatego wyrob sobie wlasne, bez szalenstwa na start.
Od jakiegos czasu ogram 888starz raczej dobre pare miesiecy i w koncu postanowilem, ze wrzuce swoje wrazenia. Szczerze mowiac — dorwalem link na jakims forum i zostalem na dluzej. U nas w Polsce ciezko o sensownych opcji, wiec cos takiego od razu sprawdzam dokladnie.
Przede wszystkim siedze w slotach i wybor jest ogromny. Jest chyba z trzy tysiace automatow, poczawszy od Pragmatic Play przez NetEnt, Play’n GO czy Yggdrasil. Klasyki typu Sweet Bonanza oraz Book of Dead sa na wyciagniecie reki, choc prawde mowiac zwykle wracam do paru swoich tytulow. Ladowanie nie tnie nawet na slabszym telefonie.
Dla tych co lubia live — obsluguje to Evolution, z prawdziwymi krupierami, a jeszcze rozne teleturnieje w stylu Crazy Time. Wciaga niesamowicie. Co do kasy — wrzucalem przez Visa i Skrill, obsluguje tez krypto. Pierwszy raz mialem na koncie po jakichs 24h, e-portfele ida najszybciej. Warto zerknac na biezace bonusy na 888starz mobile app zanim sie zapiszesz, regularnie sie aktualizuje.
Bonus na start wyglada solidnie — dostajesz spory procent od wplaty plus paczke darmowych spinow. Ruch stoi na okolo x40, co szczerze jest standardem, ale jak zawsze czlowiek musi ogarnac zasady. Minimalny depozyt jest niski, zapis poszla w doslownie pare minut. Aplikacja na androida dziala i jest znosna, instalka poza sklepem ze strony.
Zeby nie bylo za rozowo — obsluga czasem odpisuje z opoznieniem, zwlaszcza pod obciazeniem. Sprawdzanie dokumentow troche mnie wkurzyla, ale to chyba kwestia regulacji tak musi byc. Ogolnie — zostaje na razie, zdania w sieci bywaja mieszane, wiec sprawdz sam, zanim wrzucisz kase.
Cabinet IQ
8305 Ѕtate Hwy 71 #110, Austin,
TX 78735, United Ѕtates
254-275-5536
Lighting
Hi, after reading this awesome piece of writing i am too delighted to
share my familiarity here with mates.
بصراحة صرفت وقت مش قليل على الموقع ده وقلت أشارك تجربتي من غير مبالغة. اللي عجبني في الأول إن البرنامج مش تقيل على موبايلي القديم، والتنزيل ماخدش دقيقتين. مش هقولكم إنه مثالي بس الحكاية ماشية تمام لحد دلوقتي.
من ناحية الكازينو الاختيار واسع فعلًا — تقريبًا 3000 لعبة أو أكتر شوية. من الشركات الكبيرة عندك Pragmatic Play و NetEnt و Play’n GO. بحب ألعب Gates of Olympus و Sweet Bonanza، وكمان في Book of Dead لما يجي مود المخاطرة. طاولات الأونلاين لايف من Evolution، والموزعين ناس فعلًا وألعاب شوز زي Crazy Time لو بتحب الأجواء دي.
بالنسبة لبونص الترحيب الأفضل يشوف على آخر التفاصيل على ستار 888 قبل ما تسجّل. عرض الترحيب محترم صراحة وبيوصل حوالي 500% مع فري سبينز، بس خدوا بالكم من شرط الرهان لإنه بيوصل x40 وده أكتر حاجة عصبتني.
بالنسبة للسحب والإيداع مناسبة للمصريين — Visa و Mastercard شغالين، وكمان Skrill و Neteller، ولو بتحب الكريبتو برضه متاح. بتبدأ بمبلغ بسيط، وطلبت فلوسي ووصلت بسرعة للمحافظ الإلكترونية.
التسجيل خلص في دقايق، والسبورت شغال على الشات لما كان عندي سؤال. فيه رخصة Curacao وده بيطمّن شوية. هفضل مكمّل معاهم بس بنصح: خدوا 888starz apk من موقعهم مباشرة عشان الأمان.
لأكون صادق معاكم صرفت وقت مش قليل على الموقع ده وفكرت أقول انطباعي من غير مبالغة. اللي عجبني في الأول إن البرنامج مش تقيل على موبايلي القديم، وتثبيت الملف ماخدش دقيقتين. مش هقولكم إنه مثالي بس الأداء محترم لحد دلوقتي.
من ناحية الكازينو القايمة مليانة — حوالي 3000 لعبة من اللي شفته. بتلاقي أسماء معروفة زي Pragmatic Play و NetEnt و Play’n GO. أنا شخصيًا ألعب Gates of Olympus و Sweet Bonanza، وكمان في Book of Dead لما يجي مود المخاطرة. القسم بتاع الديلر المباشر من Evolution، والكروبيه حقيقيين وألعاب شوز زي Crazy Time لو بتحب الأجواء دي.
اللي مهتم بالعروض الأفضل يشوف على الأكواد الجديدة عند تحميل برنامج المراهنات 888 قبل الإيداع الأول. بونص أول إيداع كان معقول وبيوصل لحد 100% زائد لفات مجانية، بس متنسوش الـ wagering لإنه محتاج صبر ودي النقطة اللي مضايقاني.
طرق الدفع مريحة لينا في مصر — Visa و Mastercard موجودين، وكمان Skrill و Neteller، ولو بتحب الكريبتو برضه متاح. الإيداع الأدنى صغير، والسحب مكانش بطيء رغم إن الكارت أخد وقت أطول شوية.
التسجيل مش معقد، والسبورت شغال عربي كمان وده مريح لما اتلخبطت في التوثيق. المنصة مرخّصة وبيدي إحساس بالأمان. هفضل مكمّل معاهم بس عايز أقولكم: حدّثوا التطبيق أول بأول عشان تلاقوا كل حاجة شغالة.
بصراحة بقالي فترة بستخدم المنصة دي وفكرت أقول انطباعي من غير مبالغة. أول حاجة شدتني إن التطبيق خفيف على موبايلي القديم، والتنزيل كان سريع جدًا. مفيش حاجة كاملة طبعًا بس الأداء محترم لحد دلوقتي.
بالنسبة للألعاب القايمة مليانة — حوالي 3000 لعبة أو أكتر شوية. بتلاقي أسماء معروفة زي Pragmatic Play و NetEnt و Play’n GO. بحب ألعب Gates of Olympus و Sweet Bonanza، وكمان في Book of Dead لما يجي مود المخاطرة. طاولات الأونلاين لايف من Evolution، والموزعين ناس فعلًا وألعاب شوز زي Crazy Time لو بتحب الأجواء دي.
لو نفسك تشوف البونصات أنا نصيحتي تتفرج على الأكواد الجديدة على تنزيل برنامج 888starz قبل الإيداع الأول. المكافأة الأولى كان معقول وبيوصل لحد 100% وكمان دورات مجانية، بس خدوا بالكم من شرط الرهان لإنه محتاج صبر وده اللي غلّطني في الأول.
طرق الدفع مناسبة للمصريين — Visa و Mastercard متاحين، وكمان Skrill و Neteller، وللي بيتعامل بالعملات الرقمية برضه متاح. الإيداع الأدنى صغير، والسحب مكانش بطيء رغم إن الكارت أخد وقت أطول شوية.
فتح الحساب مش معقد، والدعم الفني رد عليّ على الشات لما كان عندي سؤال. الترخيص عندهم من كوراساو وبيدي إحساس بالأمان. في العموم أنا مبسوط بس النصيحة: خدوا 888starz apk من موقعهم مباشرة عشان تلاقوا كل حاجة شغالة.
Today’s Most Important: monaco grand prix vip guide: yachts, hospitality & exclusive access
валидатор схемы организации валидатор Google
нарколог на дом запой нарколог на дом
不過其實1080P 的畫質本身就已經相當不錯了,你可以看你的需求到哪,來選擇你要的
Youtube 影片畫質。
Also ich spiele jetzt seit ein paar Monaten und ganz ehrlich, am Anfang war ich echt skeptisch, ob so ein Laden mit Krypto uberhaupt was taugt. Uber nen Kumpel dort gelandet, der schon langer Poker mit Bitcoin spielt, und was soll ich sagen – hangen geblieben bin ich trotzdem. Als Spieler aus Deutschland ist das ohnehin ne halbe Wissenschaft, was Ein- und Auszahlungen angeht, aber dazu gleich mehr.
Was die Auswahl angeht gibts echt genug zu tun – wurde sagen irgendwas um die 2000 Spiele, inklusive Tische. Die ublichen Verdachtigen sind am Start: Play’n GO mit den Klassikern, Book of Dead, das lauft alles rund. Der Live-Kram ist von Evolution, mit echten Croupiers und den Gameshows, da hab ich abends gerne mal zu lange. Und klar, das eigentliche Ding ist fur mich nun mal der Pokerbereich – Bitcoin Poker eben, deswegen bin ich hier.
Beim Bonus: es gab bei mir einen 100%-Bonus bis 500€ plus rund 200 Free Spins, nicht alle auf einmal. Der Umsatz ist 35-fach, ist fair genug fur die Branche, aber lest euch die AGB genau an. Immer wieder gibts Freeroll-Turniere fur lau, so kann man antesten risikofrei das Ganze. Die aktuellen Aktionen und Codes seht ihr aktuell druben bei how to use bitcoin for online poker falls ihrs genau wissen wollt, lohnt sich.
Kommen wir zum Kritikpunkt – die Auszahlung. Per Bitcoin gings bei mir richtig schnell, echt sauber. Aber als ich mal Neteller probierte, dauerte es langer und das Ausweis-Hochladen war nervig. Die ublichen Zahlwege gehen alle, aber ganz ehrlich der ganze Sinn ist ja, dass es eben schneller und anonymer geht. Kleinster Einsatz waren 20 Euro, Anmeldung war in Minuten durch.
Am Handy lauft es uberraschend gut – App ist vorhanden fur Android und iPhone, alternativ im Browser klappt es problemlos. Der Kundendienst ist rund um die Uhr uber Live-Chat, die deutschsprachige Hilfe war ok, aber nicht perfekt, auf Englisch lief es rund. Zur Lizenz ist alles sauber dokumentiert, das check ich immer. Wer aus DE kommt, die mal Poker mit Bitcoin reinschnuppern wollen – ich bleib erstmal dabei, schaun wir mal.
Bei mir lauft das Ganze schon seit dem Fruhjahr und ganz ehrlich, zu Beginn hatte ich meine Zweifel, ob so ein Laden mit Krypto uberhaupt was taugt. Bin uber einen Kollegen drauf gekommen, der seit uber einem Jahr Poker mit Bitcoin spielt, und was soll ich sagen – hangen geblieben bin ich dann irgendwie. Fur uns hier in Deutschland ist das sowieso nicht immer easy, was Ein- und Auszahlungen angeht, dazu spater.
An Spielen gibts echt genug zu tun – so grob so 1800 bis 2000 Titel, wenn man alles zusammenzahlt. Die gro?en Namen sind am Start: NetEnt mit Gates of Olympus und Sweet Bonanza, plus Betsoft und Yggdrasil, das lauft alles rund. Der Live-Bereich kommt von Evolution, echte Dealer und Shows wie Crazy Time, da hab ich abends ofter mal. Und klar, das Kernstuck ist fur mich ganz klar das Poker – Bitcoin Poker eben, deswegen bin ich hier.
Zum Bonus: ich hab die ublichen 100% obendrauf plus rund 200 Free Spins, nicht alle auf einmal. Die Umsatzbedingung betragt x35, ist fair genug fur die Branche, lest euch besser die Bedingungen wirklich durch. Ab und zu laufen Freerolls und mal nen No-Deposit-Kracher, so kann man antesten risikofrei ein paar Hande. Die neuesten Angebote findet ihr am besten druben bei legal bitcoin poker site bevor ihr einzahlt, die halten das ganz gut aktuell.
Jetzt zum Nervigen – die Auszahlung. Mit Krypto war es richtig schnell, top. Aber als ich mal die Karte nutzen wollte, hats zwei Tage gedauert und der KYC-Kram hat genervt. Visa, Mastercard, Skrill, Neteller gehen alle, aber ganz ehrlich der Witz an der Sache ist, dass keiner gro? mitliest. Min-Deposit so um die 20 Euro, Anmeldung war in Minuten durch.
Mobil klappt alles – App ist vorhanden furs Handy, und im Browser klappt es problemlos. Der Chat zu jeder Zeit per Chat, Deutsch ging mal besser mal schlechter, auf Englisch lief es rund. Was die Regulierung angeht ist alles sauber dokumentiert, das war mir wichtig. Fur deutsche Spieler, die Poker fur Bitcoin ausprobieren wollen – ich bleib erstmal dabei, kann sich ja noch andern.
Текущие рекомендации: https://perfumerio.ru/product-brands/jimmy-choo/
بصراحة أنا بلعب هنا من كام شهر وفكرت أقول انطباعي من غير مبالغة. اللي عجبني في الأول إن التطبيق خفيف على موبايلي القديم، والتنزيل تم من غير أي وجع دماغ. مش هقولكم إنه مثالي بس الأداء محترم لحد دلوقتي.
على مستوى السلوتس في كم كبير من الألعاب — تقريبًا 3000 لعبة على ما أعتقد. بتلاقي أسماء معروفة زي Pragmatic Play و NetEnt و Play’n GO. بحب ألعب Gates of Olympus و Sweet Bonanza، وكمان في Book of Dead لما يجي مود المخاطرة. طاولات الأونلاين لايف من Evolution، وفيه ناس بتوزع لايف وحاجات مسلية زي Crazy Time لو بتحب الأجواء دي.
لو نفسك تشوف البونصات ينصح يبص على الأكواد الجديدة في 888starz تنزيل قبل ما تسجّل. بونص أول إيداع مش وحش وبيوصل لمبلغ كويس زائد لفات مجانية، بس متنسوش الـ wagering لإنه محتاج صبر وده اللي غلّطني في الأول.
بالنسبة للسحب والإيداع مريحة لينا في مصر — Visa و Mastercard متاحين، وكمان Skrill و Neteller، وفي خيار البيتكوين برضه متاح. بتبدأ بمبلغ بسيط، والسحب عندي جه في يوم تقريبًا رغم إن الكارت أخد وقت أطول شوية.
فتح الحساب خلص في دقايق، والسبورت شغال عربي كمان وده مريح لما احتجت مساعدة. المنصة مرخّصة وعلى الأقل مش موقع مجهول. لسه بلعب لحد دلوقتي بس النصيحة: حدّثوا التطبيق أول بأول عشان الأمان.
يا جماعة بصراحة أنا بلعب هنا من كام شهر وحبيت أكتب رأيي من غير مبالغة. اللي عجبني في الأول إن البرنامج مش تقيل على موبايلي القديم، والتنزيل كان سريع جدًا. مفيش حاجة كاملة طبعًا بس الشغل نضيف لحد دلوقتي.
بالنسبة للألعاب الاختيار واسع فعلًا — تقريبًا 3000 لعبة أو أكتر شوية. بتلاقي أسماء معروفة زي Pragmatic Play و NetEnt و Play’n GO. أنا بميل ألعب Gates of Olympus و Sweet Bonanza، وكمان في Book of Dead لما يجي مود المخاطرة. القسم بتاع الديلر المباشر من Evolution، والكروبيه حقيقيين وحاجات مسلية زي Crazy Time لو بتحب الأجواء دي.
اللي مهتم بالعروض الأفضل يشوف على آخر التفاصيل على برنامج مراهنات 888starz قبل الإيداع الأول. المكافأة الأولى مش وحش وبيوصل حوالي 500% مع فري سبينز، بس خدوا بالكم من شرط الرهان لإنه مش قليل ودي النقطة اللي مضايقاني.
من ناحية الفلوس مريحة لينا في مصر — Visa و Mastercard متاحين، وكمان Skrill و Neteller، ولو بتحب الكريبتو برضه متاح. بتبدأ بمبلغ بسيط، وطلبت فلوسي ووصلت بسرعة للمحافظ الإلكترونية.
التسجيل مش معقد، والدعم الفني رد عليّ على الشات لما احتجت مساعدة. الترخيص عندهم من كوراساو وده بيطمّن شوية. في العموم أنا مبسوط بس بنصح: حدّثوا التطبيق أول بأول عشان تلاقوا كل حاجة شغالة.
Bei mir lauft das Ganze schon seit gut vier Monaten und ganz ehrlich, am Anfang war ich echt skeptisch, ob so ein Laden mit Coins uberhaupt was taugt. Bin uber einen Kollegen dort gelandet, der schon langer bitcoin online poker spielt, und tja – hangen geblieben bin ich trotzdem. Als Spieler aus Deutschland ist das eh manchmal echt zah, was Ein- und Auszahlungen angeht, dazu spater.
Was die Auswahl angeht wird einem nicht langweilig – wurde sagen uber 1500 Spiele, alles in allem. Die gro?en Namen sind am Start: NetEnt mit dem ganzen Kram, plus Betsoft und Yggdrasil, das lauft alles rund. Die Live-Ecke lauft uber Evolution, richtige Croupiers und Kram wie Crazy Time, da versacke ich abends schon zu oft. Aber gut, das eigentliche Ding ist fur mich ganz klar das Poker – Bitcoin Poker eben, deswegen bin ich hier.
Beim Bonus: angeboten wurden mir einen 100%-Bonus bis 500€ plus rund 200 Free Spins, nicht alle auf einmal. Das Wagering betragt x35, ist fair genug fur die Branche, schaut euch die Bedingungen wirklich durch. Immer wieder gibts Freeroll-Turniere fur lau, da holt man sich ganz entspannt das Ganze. Die neuesten Angebote seht ihr aktuell direkt bei bitcoin poker tables falls ihrs genau wissen wollt, lohnt sich.
Jetzt zum Nervigen – das Auszahlen. Per Bitcoin gings bei mir meist unter ner Stunde, echt sauber. Als ich einmal Neteller probierte, zog sich das und das Ausweis-Hochladen zog sich. Die ublichen Zahlwege klappen, mal ehrlich der Vorteil von Bitcoin beim Poker ist ja, dass keiner gro? mitliest. Min-Deposit lag bei 20€, Registrierung war in Minuten durch.
Unterwegs laufts sauber – es gibt ne App fur beide Systeme, alternativ im Browser funktioniert es genauso. Der Chat ist rund um die Uhr per Chat, Deutsch ging etwas holprig, englisch ging aber immer. Zur Lizenz passt es, darauf achte ich. Wer aus DE kommt, die Poker fur Bitcoin ausprobieren wollen – ich zock weiter, kann sich ja noch andern.
Читать больше на сайте: https://archeagewiki.ru/%D0%9E%D1%82%D0%B4%D1%8B%D1%85_%D0%BD%D0%B0_%D0%BF%D0%BE%D0%B1%D0%B5%D1%80%D0%B5%D0%B6%D1%8C%D0%B5/